一种适用于高精度定位的容错引导性定位接口的制作方法
- 国知局
- 2024-08-05 11:58:55
本发明属于隧道掘进施工设备,针对受限空间下大负载机器人多目标高精度定位难度大的工程问题,设计了一种适用于高精度定位的容错引导性定位接口。
背景技术:
1、巨大的市场对全断面隧道掘进机的施工安全及效率提出更高的要求。滚刀更换作为制约隧道掘进效率的一个主要因素,其目前主要靠人工更换,换刀工人面对极端恶劣的高压、高湿的作业环境,生命安全难以保障且换刀效率极低。传统的滚刀安装需要工人用拆卸工具与滚刀上的紧固螺栓对接,实现滚刀的更换。据统计,人工带压更换一把滚刀需要的时间在3小时左右,滚刀更换时间约占整个施工时间的20%以上。“换刀难,换刀险”的国际性行业问题已经成为制约复杂地质条件下隧道施工安全与效率的瓶颈,以高效的“机器代人”已经成为解决该问题的主要途径。在“机器代人”过程中由于在受限空间下大负载机器人进行多目标高精度定位的难度极大,进而导致换刀对接流程复杂、换刀时间长和换刀机械手复杂度高。因此,为了保障换刀工人的生命安全,提高换刀效率,缩短掘进工期,降低整个隧道工程的造价成本,为了迎合用机械手进行换刀,为了解决受限空间下大负载机器人多目标高精度定位难度大的工程问题,有必要开发一种适用于高精度定位的容错引导性定位接口,以满足机器人换刀定位要求。
技术实现思路
1、本发明的目的在于提供一种适用于高精度定位的容错引导性定位接口,简化换刀对接流程,大幅度缩短换刀时间,降低换刀机械手设计的复杂性,更好的代替人工换刀作业。该引导性定位接口在掘进机的刀具磨损或损坏后,需要更换滚刀时,可以满足机器人换刀快速准确定位要求,方便滚刀从刀盘中拆卸出来。
2、本发明的技术方案:
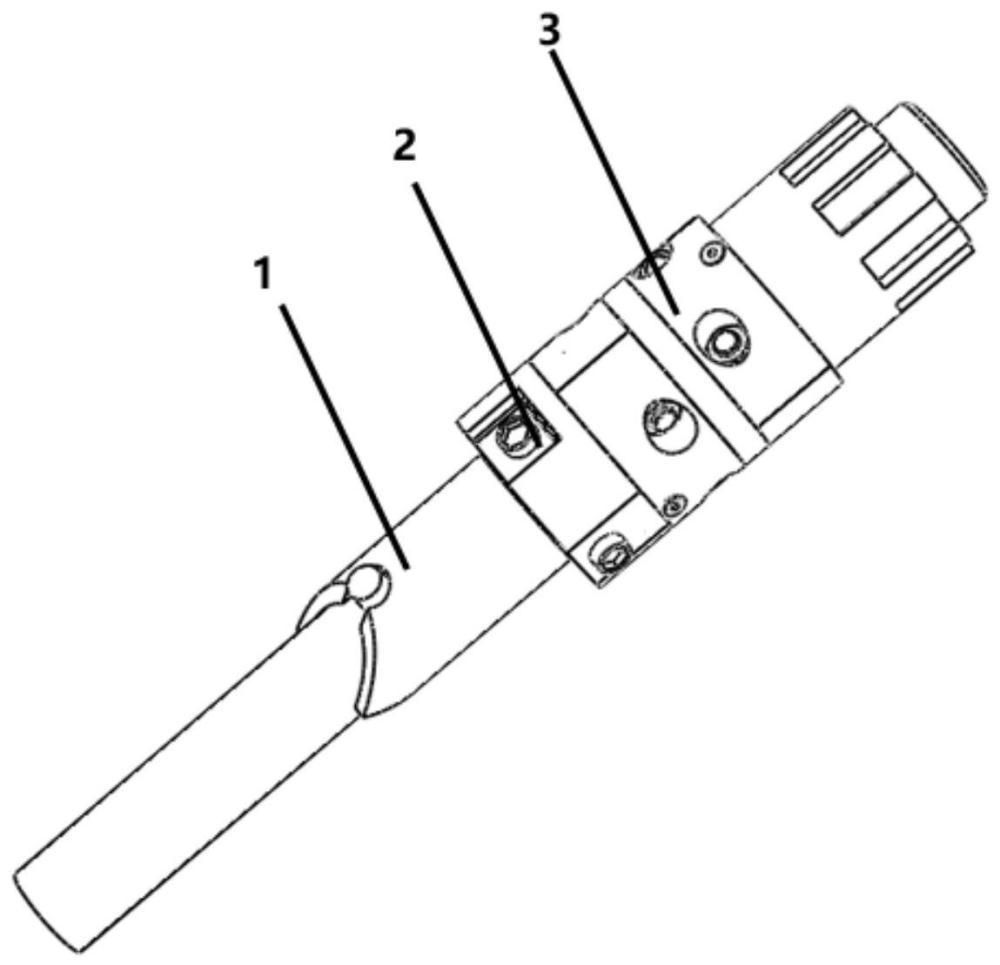
3、一种适用于高精度定位的容错引导性定位接口,主要由定位引导接口1、摆动末端2、平移末端3三部分组成;
4、所述的定位引导接口1主要由锥螺栓1-1和v字引导接口1-2组成,为可自动调整周向相位误差的定位引导接口;其中锥螺栓1-1的头部是圆锥形,其实现与v字引导接口1-2对接过程中心自定位;锥螺栓1-1上部有对称的凸起小圆柱,用以传递扭矩,以实现螺栓的拆卸;v字引导接口1-2与锥螺栓1-1匹配的端部为中空的,其前端开有两个v字斜面,该v字斜面实现与锥螺栓1-1对接过程周向相位自调整;
5、所述的摆动末端2主要由带肩铰链销轴2-1、连接轴2-2、万向铰-套筒2-3、十字轴2-4组成,实现角度摆动的摆动末端;带肩铰链销轴2-1末端带有螺纹,安装时依次穿过v字引导接口1-2、连接轴2-2、万向铰-套筒2-3结构上的圆孔与十字轴2-4的内螺纹孔相连接;连接轴2-2为中空的,两侧有两个对称的矩形槽,另两侧有两个带圆孔对称平面,带肩铰链销轴2-1安装后,万向铰-套筒2-3可绕带肩铰链销轴2-1摆动;万向铰-套筒2-3为中空的套筒,周向上均布四个平面,其每个平面上都有一个圆孔,与带肩铰链销轴2-1相配合;由于万向铰-套筒2-3与连接轴2-2上的矩形槽有一定距离,所以万向铰-套筒2-3可绕着带肩铰链销轴2-1向矩形槽两侧摆动;十字轴2-4呈现十字的形状,四个端部都有螺纹孔,与带肩铰链销轴2-1末端相连接;v字引导接口1-2与摆动末端2匹配的端部为中空的,两侧有两个对称的矩形凹槽,矩形凹槽底部与十字轴2-4上平面有一段距离,另两侧有两个对称平面,平面上有圆孔,带肩铰链销轴2-1安装后,v字引导接口1-2可绕带肩铰链销轴2-1摆动;
6、所述的平移末端3主要由输出轴3-1、十字滑块3-2、螺栓3-3、定位螺钉3-4、半圆滑块3-5、螺母3-6组成,可实现一定范围移动补偿;输出轴3-1两端都有花键,上部花键用于与联轴器相连,下部花键用于与两个半圆滑块3-5相连,采用花键连接可更好的传递扭矩;为了使两个半圆滑块3-5与输出轴3-1轴向相对固定,采用定位螺钉3-4连接,定位螺钉3-4穿过半圆滑块3-5上的圆孔与输出轴3-1上的螺纹孔相配合,使两个半圆滑块3-5与输出轴3-1轴向相对固定;十字滑块3-2左右两侧面分别有相互垂直的t形滑块,t形滑块与四个半圆滑块3-5内部t形滑槽相配合,安装时半圆滑块3-5内部t形滑槽从侧面滑入十字滑块3-2左右两侧有相互垂直的t形滑块,之后通过螺栓3-3与螺母3-6将对应的半圆滑块3-5连接起来,由于两个半圆滑块3-5内部t形滑槽长度大于十字滑块3-2上t形滑块长度,故十字滑块3-2相互垂直的t形滑块,可沿着各自方向在半圆滑块3-5内部t形滑槽在一定范围内移动,两个相互垂直方向可进行矢量合成,进而可在任意方向进行移动;半圆滑块3-5的一侧面开有与t形滑块相匹配的t形滑槽,另一侧面设有与连接轴2-2上花键相配合的花键槽;连接轴2-2上部设有花键,其与两个半圆滑块3-5相连接,采用花键连接可更好的传递扭矩,为了使两个半圆滑块3-5与连接轴2-2轴向相对固定,采用定位螺钉3-4连接,定位螺钉3-4穿过半圆滑块3-5上的圆孔与连接轴2-2上的螺纹孔相配合,使两个半圆滑块3-5与连接轴2-2轴向相对固定;通过该平移末端3可实现一定范围移动补偿。
7、工作原理:机械手上的v字引导接口1-2靠近刀座系统上的锥螺栓1-1,在未对接时v字引导接口1-2与锥螺栓1-1会产生中心定位误差、相位误差、摆角误差;在逐渐靠近过程中,锥螺栓1-1上的两个小圆柱会沿着v字引导接口1-2的v形斜面下滑到圆形孔中,消除v字引导接口1-2与锥螺栓1-1相位误差;通过摆动末端2消除在对接时产生的摆角误差;在逐渐靠近过程中,锥螺栓1-1上的圆锥部分渐渐与v字引导接口1-2中空圆相配合,最后通过圆锥形结构消除中心定位误差,使得v字引导接口1-2与刀座系统上的锥螺栓1-1轴线重合;之后固定不动输出轴3-1与v字引导接口1-2轴线会产生一定的偏移,通过平移末端3来补偿两者轴线产生的偏移;顺利完成对接。
8、本发明的有益效果:本发明是一种高精度定位的容错引导性定位接口,具有中心自定位、相位自调整、角度补偿及位移补偿的功能,能够有效降低机器人更换滚刀时与螺栓对接难度和换刀机器人设计的复杂性。同时,保障操作工人的人身安全,大幅度提高机器人更换滚刀时对接的效率,从而加快隧道施工的进度,节约经济成本。
技术特征:1.一种适用于高精度定位的容错引导性定位接口,其特征在于,该一种适用于高精度定位的容错引导性定位接口,主要由定位引导接口(1)、摆动末端(2)、平移末端(3)三部分组成;
技术总结本发明属于隧道掘进施工设备技术领域,针对受限空间下大负载机器人多目标高精度定位难度大的工程问题,设计了一种适用于高精度定位的容错引导性定位接口,主要由定位引导接口、摆动末端、平移末端三部分组成。该容错引导性定位接口能够有效降低机器人更换滚刀时与螺栓对接难度和换刀机器人设计的复杂性。同时,保障操作工人的人身安全,大幅度提高机器人更换滚刀时对接的效率,从而加快隧道施工的进度,节约经济成本。技术研发人员:余情园,霍军周,伞志丰,边志远,杨博文,菅永博,李迎波,高松,宋海一,邢世龙受保护的技术使用者:中铁十九局集团第一工程有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/260438.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表