一种两栖无人艇自主登陆系统及其控制方法
- 国知局
- 2024-08-05 11:58:52
本发明涉及两栖无人艇自主行驶,具体涉及一种两栖无人艇自主登陆系统及其控制方法。
背景技术:
1、无人艇因为其灵活机动、智能化水平高、能够在恶劣环境下执行任务的优点,在军事国防、安防巡逻、紧急救援和水文监测等方面均发挥有巨大作用。轮式两栖艇具备在水上和陆地两种环境中高效行驶和灵活切换的特性,可以在一些水陆切换的场景下高速通行,无需如普通船艇一般吊装下水上岸,从而提升了工作效率,拓宽了应用场景。
2、然而,国内外至今关于两栖艇的自主登陆技术研究较少,同时,因为近岸端障碍物较多和轮式两栖艇登陆条件严苛等问题,给两栖无人艇的自主登陆带来了较大挑战。因此,如何实现轮式两栖艇的高效可靠自主登陆是个急需解决的问题。
技术实现思路
1、为了克服现有技术存在的缺陷与不足,本发明提供一种两栖无人艇自主登陆系统及其控制方法,本发明可以实现轮式两栖艇的无人化作业,可以实现两栖无人艇的高效可靠自主登陆功能。
2、为了达到上述目的,本发明采用以下技术方案:
3、本发明提供一种两栖无人艇自主登陆系统,包括:无人化测控平台、水上行驶子系统和陆地行驶子系统;
4、所述无人化测控平台用于对两栖无人艇外界环境信息进行多源性采集,基于所采集数据实时运行自主登陆控制算法,计算出控制指令,并下发控制指令至水上行驶子系统和陆地行驶子系统,实现无人化控制;
5、所述自主登陆控制算法的实现包括:
6、构建双层栅格地图叠加结构的近岸端路径规划环境模型;
7、基于hybrid a*算法生成满足无人艇运动学特性,连接初始位姿和目标位姿的全局路径,基于teb算法对全局路径进行局部优化;
8、辨识无人艇三自由度运动模型参数;
9、基于nmpc算法对规划路径进行曲线路径跟踪;
10、判定到达目标登陆点时将水上行驶子系统切换成陆地行驶子系统;
11、所述水上行驶子系统用于接收无人化测控平台发送的控制指令,驱动两栖无人艇水上自主航行;
12、所述陆地行驶子系统用于接收无人化测控平台发送的控制指令,驱动两栖无人艇陆上自主行驶。
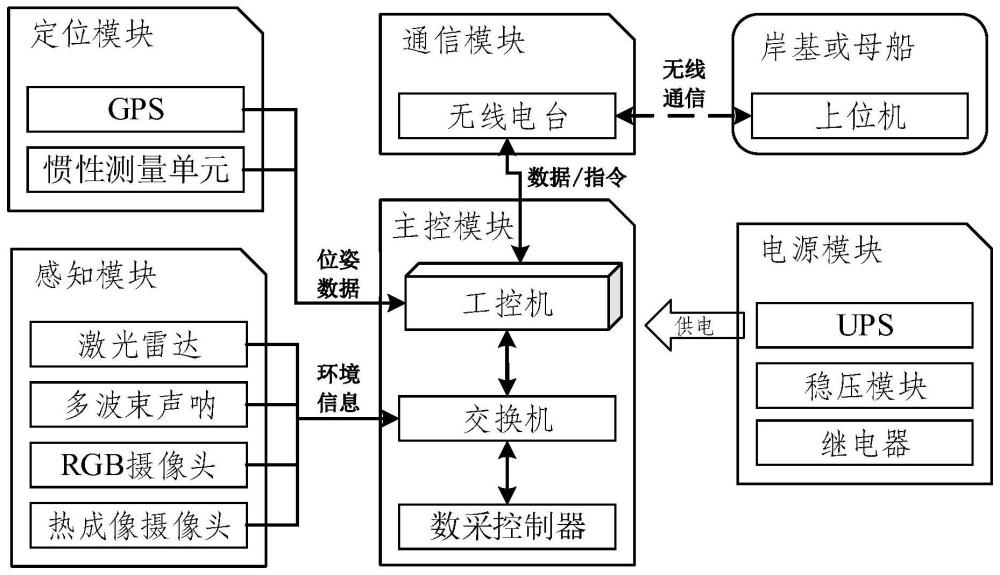
13、作为优选的技术方案,所述无人化测控平台包括主控模块、定位模块、感知模块、通信模块和电源模块;
14、所述主控模块包括工控机、工业交换机和数采控制器,所述工控机用于运行自主登陆控制算法,所述工业交换机用于传输多源传感器信息和控制指令,所述数采控制器用于将控制指令下发至水上行驶子系统接、陆地行驶子系统并采集反馈状态;
15、所述定位模块包括惯性测量单元和gps,所述惯性测量单元用于采集无人艇姿态和速度信息,gps用于采集无人艇位置信息;
16、所述感知模块包括激光雷达、多波束声呐、rgb摄像头和热成像摄像头,用于采集外界环境的多源传感信息;
17、所述通信模块采用无线电台,用于与岸基端上位机远程通信;
18、所述电源模块用于给主控模块、定位模块、感知模块、通信模块供电。
19、作为优选的技术方案,所述水上行驶子系统设有水上驱动模块,所述水上驱动模块包括推进器、转速控制器、电动泵和舵角传感器,所述推进器用于为两栖无人艇水上航行提供动力,所述转速控制器用于将推进器螺旋桨转速的机械控制转换为电动控制,所述电动泵用于通过开闭电磁阀将打舵操作的油路控制转换为电路控制,舵角传感器用于反馈舵角信号,进而实现对舵角的闭环控制。
20、作为优选的技术方案,所述陆地行驶子系统设有陆地驱动模块,所述陆地驱动模块包括行驶机构,用于为两栖无人艇陆地行驶提供动力,并通过can协议与无人化测控平台通信,进而实现对行驶机构升降、转速以及前轮转角的控制。
21、本发明还提供一种两栖无人艇自主登陆系统的控制方法,设有上述两栖无人艇自主登陆系统,该方法包括下述步骤:
22、构建双层栅格地图叠加结构的近岸端路径规划环境模型;
23、基于hybrid a*算法生成满足无人艇运动学特性,连接初始位姿和目标位姿的全局路径,基于teb算法对全局路径进行局部优化;
24、辨识无人艇三自由度运动模型参数;
25、基于nmpc算法对规划路径进行曲线路径跟踪;
26、判定到达目标登陆点时将水上行驶子系统切换成陆地行驶子系统。
27、作为优选的技术方案,所述构建双层栅格地图叠加结构的近岸端路径规划环境模型,具体包括:
28、基于卫星地图提取水面区域,构建静态地图层;
29、基于点云信息提取可通行区域,构建动态障碍物地图层;
30、将静态地图层、动态障碍物地图层按设定规则叠加,最终形成面向登陆场景的路径规划栅格地图;
31、设定的规则表示为:
32、
33、其中,s、o、f分别标识静态地图层、障碍物地图层和最终地图层,表示在障碍物层栅格地图范围内的索引。
34、作为优选的技术方案,所述基于卫星地图提取水面区域,构建静态地图层,具体包括:
35、选取卫星地图图像中水面区域像素作为种子点;
36、将卫星地图rgb图像转换到lab色彩空间;
37、采用区域生长算法提取水面区域,并以像素大小为分辨率构建栅格地图。
38、作为优选的技术方案,所述基于点云信息提取可通行区域,构建动态障碍物地图层,具体包括:
39、基于惯导数据对点云信息进行矫正;
40、对点云信息进行滤波;
41、将点云信息映射至设定分辨率的栅格地图。
42、作为优选的技术方案,所述辨识无人艇三自由度运动模型参数,具体包括:
43、进行10°和20°z型实船实验,过程中以20hz的频率采集无人艇纵向速度u,横向速度v,艏摇速度r,艏向角ψ,推进器推进角δ和转速n,采用最小二乘法对无人艇运动模型参数进行辨识并验证。
44、作为优选的技术方案,所述基于nmpc算法对规划路径进行曲线路径跟踪,具体包括:
45、构建无人艇运动状态空间模型:
46、
47、y=px
48、其中,a*为无人运动模型相关参数,x=[u,v,r,x,y,ψ]t为状态向量,u=[τu,τr]t为控制变量,y=[x,y,ψ]t为输出向量,
49、采用龙格-库塔法对无人艇运动状态空间模型公式进行离散化得:
50、
51、优化的目标函数设定为:
52、
53、其中,n为预测步长,yd=[xd,yd,ψd]t为期望跟踪位姿,q=(q1 … qn)代表输出误差权重矩阵,r=(r1 … rn)代表输入权重矩阵;
54、无人艇推进器存在推进角饱和约束和推进角速度饱和约束,表示如下:
55、δmin≤δ≤δmax
56、δδmin≤δδ≤δδmax
57、其中,δmin和δmax表示推进器推进角的下限和上限,δδmin和δδmax表示推进器推进角速度的下限和上限;
58、将优化问题转化为标准的二次规划形式,通过求优化解得到最佳的控制变量增量序列,将序列的第一个元素与上一次的控制变量相加即可得到当前时刻的控制输入,重复上述步骤,进而实现基于nmpc算法曲线路径跟踪。
59、本发明与现有技术相比,具有如下优点和有益效果:
60、本发明可以实现轮式两栖艇的无人化作业,可以实现两栖无人艇的高效可靠自主登陆功能。
本文地址:https://www.jishuxx.com/zhuanli/20240802/260431.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。