一种显示屏生产用智能机械手的制作方法
- 国知局
- 2024-08-05 11:51:25
本发明涉及机械手领域,尤其涉及一种显示屏生产用智能机械手。
背景技术:
1、机械手在显示屏生产中扮演着重要的角色;其中安装有吸盘的机械手在显示屏的物料搬运、精密对位、贴合工艺、质量检测辅助和包装与装载中运用频繁;能够精确、稳定地搬运显示屏,避免了人工搬运可能造成的损坏。
2、现有的机械手为满足不同大小显示屏的搬运效果,通常会在机械手上安装固定架;再在固定架下侧安装多个吸盘,提高吸附力、避免搬运较大的显示屏时吸附效果差,导致搬运过程中出现意外;但这也导致机械手在搬运较小的显示屏时,最外侧的部分吸盘无法与显示屏接触,因此吸盘进行真空吸附时,这些吸盘会持续对外界产生吸力,将灰尘、杂质等颗粒物吸入固定架的连通通道内,导致吸盘堵塞,影响机械手对显示屏的吸附、搬运效果;且固定架上的吸盘通常都是连通的,部分吸盘吸入灰尘、杂质会影响到所有吸盘。
技术实现思路
1、为了克服现有的机械手为搬运较大的显示屏会安装多个吸盘;但这也导致搬运较小的显示屏时,部分吸盘不与显示屏接触,因此吸盘进行真空吸附时,这些吸盘会持续对外界产生吸力,将灰尘、杂质等颗粒物吸入吸盘内,导致吸盘堵塞,影响机械手对显示屏的吸附、搬运效果的缺点,本发明提供一种显示屏生产用智能机械手。
2、本发明的技术实施方案是:一种显示屏生产用智能机械手,包括有机械手和固定架;机械手上安装有固定架;机械手上设置有负压真空设备;还包括有吸盘、第一连接管、阀盖、第一弹簧和适配组件;固定架固接有若干个第一连接管,每个第一连接管均与机械手上的负压真空设备连通;每个第一连接管均连接有用于适配曲面显示屏的适配组件;每个适配组件下侧均连接有用于吸附显示屏的吸盘;每个第一连接管内均开设有第一空腔和第二空腔;第一空腔和第二空腔均为圆柱型空腔,且相互连通;第一空腔的直径大于第二空腔的直径,且第一空腔位于第二空腔下侧;第一空腔内滑动连接有用于将第一连接管密封的阀盖,且阀盖的直径大于第二空腔的直径,但小于第一空腔的直径;阀盖和第一连接管之间固接有第一弹簧;第一连接管上侧开设有连通口,第一空腔、第二空腔和连通口相连通。
3、可选地,适配组件包括有第二连接管、伸缩气囊、滚珠、连接座、电磁铁和连接套;第一连接管下侧可拆卸连接有第二连接管;第一连接管下侧固接有连接套;通过连接套将第一连接管和第二连接管连接;第二连接管下侧固接有滚珠;滚珠中部开设有通槽;且通槽与第一空腔连通;滚珠下侧转动连接有连接座;吸盘固接于连接座下侧;连接座内固接有电磁铁,电磁铁与滚珠滑动连接;第一连接管上侧固接有伸缩气囊;伸缩气囊将第一连接管分为上下两个部分。
4、可选地,阀盖外表面设置有过滤棉。
5、可选地,还包括有第二密封圈;第一空腔和第二空腔的连接处固接有第二密封圈。
6、可选地,还包括有限位环;位于伸缩气囊上侧的第一连接管下部开设有滑槽;位于伸缩气囊下侧的第一连接管上部固接有限位环,限位环周壁开设有若干通孔;限位环位于伸缩气囊内部;且限位环在滑槽内滑动,但限位环不会滑出滑槽。
7、可选地,还包括有夹持块、缓冲块、第二弹簧和滑动组件;主支架上连接有滑动组件;滑动组件上连接有用于夹持显示屏的夹持块;夹持块上滑动连接有用于缓冲机械手转动产生的扭力的缓冲块;缓冲块与夹持块之间存在空腔;缓冲块与夹持块之间固接有若干个第二弹簧;每个第二弹簧均位于对应的缓冲块与夹持块之间的空腔内;固定架由主支架和副支架组成。
8、可选地,滑动组件包括有电动滑轨和滑块;主支架上固接有若干个八个电动滑轨;每个电动滑轨上均滑动连接滑块;每个滑块均与对应的夹持块固接。
9、可选地,每个缓冲块朝向显示屏一侧均呈开口状,且缓冲块与显示屏边角接触部位均做倒角处理。
10、可选地,还包括有遮挡帘;每个缓冲块与对应的夹持块之间固接有两个遮挡帘;通过遮挡帘对缓冲块与夹持块之间的空腔进行密封。
11、可选地,每个缓冲块与显示屏接触部位均设置为海绵材质。
12、与现有技术相比,本发明具有如下优点:本发明实现了一、当机械手搬运曲面屏时,通过适配组件使吸盘底面与曲面的显示屏完美贴合,适配曲面的显示屏,提高稳定效果,同时通过伸缩气囊使吸盘有较大的收缩性,因此在吸附曲面屏时,可使吸盘适应曲屏的高低落差;使得机械手同时适配曲屏和直屏的搬运,且当吸盘进行吸附后,滚珠与连接座之间为固定状态,进而防止吸盘吸附显示屏后,连接座产生摇晃,影响吸附效果;
13、二、通过阀盖,当吸附较小的显示屏时;此时阀盖会移动至第一空腔最上侧并将第二空腔密封,进而使不与显示屏接触的吸盘不再产生吸力,进而避免这些吸盘持续对外界产生吸力,同时通过过滤棉对灰尘、杂质等颗粒物进行拦截,防止灰尘、杂质等颗粒物吸入固定架的气流连通通道内,导致堵塞,影响吸盘的吸附效果;
14、三、通过将滑动组件安装在主支架上,并通过滑动组件带动夹持块移动,进而在吸盘对不同大小的显示屏进行吸附后,通过夹持块和缓冲块对显示屏进行夹持,提高机械手吸附显示屏的稳定性;且机械手旋转、翻转使显示屏产生甩动力时,通过第二弹簧抵消显示屏的甩力,同时缓冲块与显示屏的接触面设置为海绵材质,避免缓冲块对显示屏造成损伤。
15、本发明还具有如下有益效果:通过第二密封圈提高阀盖对第二空腔的密封效果,避免较小的灰尘、杂质等颗粒物进入固定架内;
16、通过遮挡帘对缓冲块与夹持块之间的间隙进行密封;防止灰尘、杂质等颗粒物进入缓冲块与夹持块之间的间隙内,影响第二弹簧的收缩效果,进而影响缓冲块的缓冲保护效果。
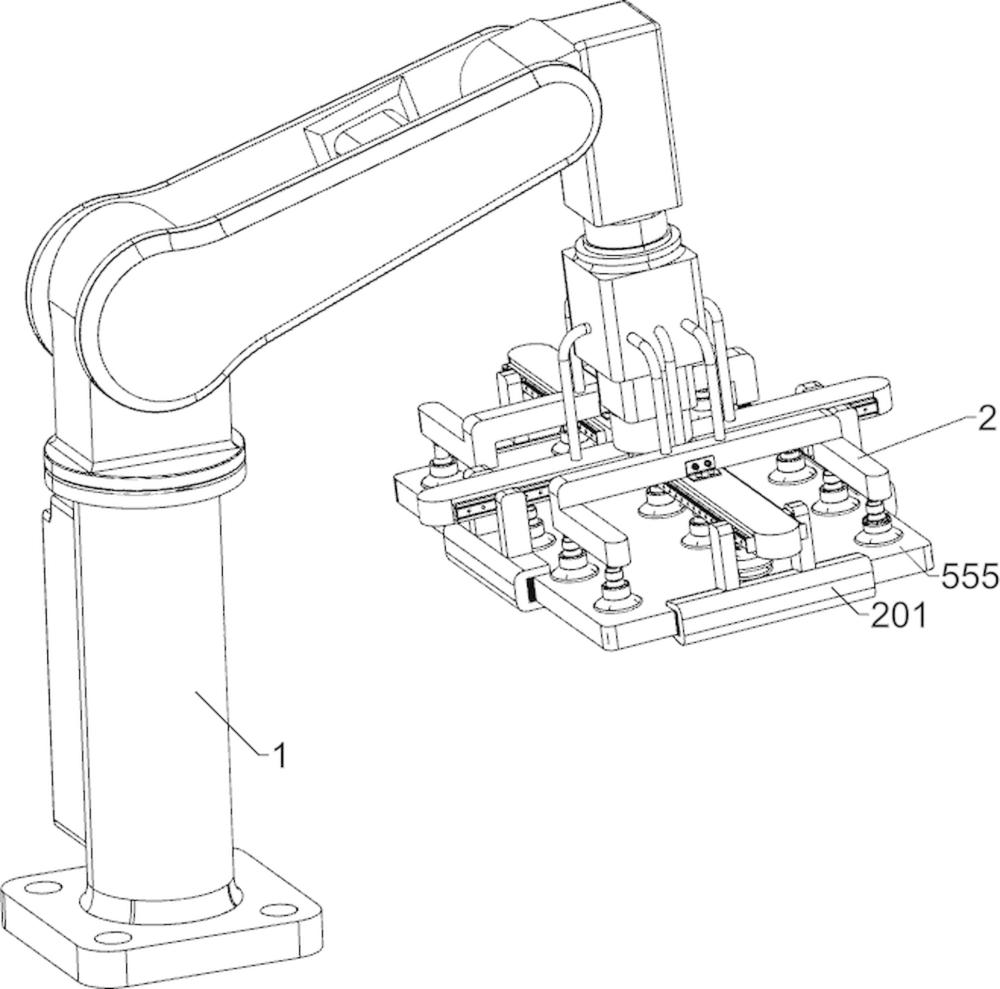
技术特征:1.一种显示屏生产用智能机械手,包括有机械手(1)和固定架(2);机械手(1)上安装有固定架(2);机械手(1)上设置有负压真空设备;其特征是:还包括有吸盘(101)、第一连接管(102)、阀盖(104)、第一弹簧(105)和适配组件;固定架(2)固接有若干个第一连接管(102),每个第一连接管(102)均与机械手(1)上的负压真空设备连通;每个第一连接管(102)均连接有用于适配曲面显示屏(555)的适配组件;每个适配组件下侧均连接有用于吸附显示屏(555)的吸盘(101);每个第一连接管(102)内均开设有第一空腔(10201)和第二空腔(10202);第一空腔(10201)和第二空腔(10202)均为圆柱型空腔,且相互连通;第一空腔(10201)的直径大于第二空腔(10202)的直径,且第一空腔(10201)位于第二空腔(10202)下侧;第一空腔(10201)内滑动连接有用于将第一连接管(102)密封的阀盖(104),且阀盖(104)的直径大于第二空腔(10202)的直径,但小于第一空腔(10201)的直径;阀盖(104)和第一连接管(102)之间固接有第一弹簧(105);第一连接管(102)上侧开设有连通口(10203),第一空腔(10201)、第二空腔(10202)和连通口(10203)相连通。
2.按照权利要求1所述的一种显示屏生产用智能机械手,其特征是:适配组件包括有第二连接管(103)、伸缩气囊(106)、滚珠(109)、连接座(110)、电磁铁(111)和连接套(112);第一连接管(102)下侧可拆卸连接有第二连接管(103);第一连接管(102)下侧固接有连接套(112);通过连接套(112)将第一连接管(102)和第二连接管(103)连接;第二连接管(103)下侧固接有滚珠(109);滚珠(109)中部开设有通槽(10901);且通槽(10901)与第一空腔(10201)连通;滚珠(109)下侧转动连接有连接座(110);吸盘(101)固接于连接座(110)下侧;连接座(110)内固接有电磁铁(111),电磁铁(111)与滚珠(109)滑动连接;第一连接管(102)上侧固接有伸缩气囊(106);伸缩气囊(106)将第一连接管(102)分为上下两个部分。
3.按照权利要求1所述的一种显示屏生产用智能机械手,其特征是:阀盖(104)外表面设置有过滤棉(10401)。
4.按照权利要求1所述的一种显示屏生产用智能机械手,其特征是:还包括有第二密封圈(107);第一空腔(10201)和第二空腔(10202)的连接处固接有第二密封圈(107)。
5.按照权利要求2所述的一种显示屏生产用智能机械手,其特征是:还包括有限位环(108);位于伸缩气囊(106)上侧的第一连接管(102)下部开设有滑槽;位于伸缩气囊(106)下侧的第一连接管(102)上部固接有限位环(108),限位环(108)周壁开设有若干通孔;限位环(108)位于伸缩气囊(106)内部;且限位环(108)在滑槽内滑动,但限位环(108)不会滑出滑槽。
6.按照权利要求1所述的一种显示屏生产用智能机械手,其特征是:还包括有夹持块(201)、缓冲块(202)、第二弹簧(204)和滑动组件;主支架(2001)上连接有滑动组件;滑动组件上连接有用于夹持显示屏(555)的夹持块(201);夹持块(201)上滑动连接有用于缓冲机械手(1)转动产生的扭力的缓冲块(202);缓冲块(202)与夹持块(201)之间存在空腔;缓冲块(202)与夹持块(201)之间固接有若干个第二弹簧(204);每个第二弹簧(204)均位于对应的缓冲块(202)与夹持块(201)之间的空腔内;固定架(2)由主支架(2001)和副支架(2002)组成。
7.按照权利要求6所述的一种显示屏生产用智能机械手,其特征是:滑动组件包括有电动滑轨(205)和滑块(206);主支架(2001)上固接有若干个八个电动滑轨(205);每个电动滑轨(205)上均滑动连接滑块(206);每个滑块(206)均与对应的夹持块(201)固接。
8.按照权利要求6所述的一种显示屏生产用智能机械手,其特征是:每个缓冲块(202)朝向显示屏(555)一侧均呈开口状,且缓冲块(202)与显示屏(555)边角接触部位均做倒角处理。
9.按照权利要求8所述的一种显示屏生产用智能机械手,其特征是:还包括有遮挡帘(203);每个缓冲块(202)与对应的夹持块(201)之间固接有两个遮挡帘(203);通过遮挡帘(203)对缓冲块(202)与夹持块(201)之间的空腔进行密封。
10.按照权利要求9所述的一种显示屏生产用智能机械手,其特征是:每个缓冲块(202)与显示屏(555)接触部位均设置为海绵材质。
技术总结本发明涉及机械手领域,尤其涉及一种显示屏生产用智能机械手。本发明的技术实施方案是:一种显示屏生产用智能机械手,包括有机械手和固定架等;机械手上安装有固定架;机械手上设置有负压真空设备。本发明实现了当机械手搬运曲面屏时,通过适配组件使吸盘底面在吸附曲面屏时,通过伸缩气囊使吸盘适应曲屏的高低落差;使得机械手同时适配曲屏和直屏的搬运,且当吸盘进行吸附后,滚珠与连接座之间为固定状态,进而防止吸盘吸附显示屏后,连接座产生摇晃,影响吸附效果,通过阀盖,当吸附较小的显示屏时;此时阀盖会移动至第一空腔最上侧并将第二空腔密封,进而使不与显示屏接触的吸盘不再产生吸力,进而避免这些吸盘持续对外界产生吸力。技术研发人员:陈国文,张金阳受保护的技术使用者:江西芯智景光电有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/259732.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。