基于光学识别与电磁感应相结合的双机跟随系统及方法
- 国知局
- 2024-08-05 11:47:18
本发明属于网衣清洗机器人相对距离测试,具体涉及一种基于光学识别与电磁感应相结合的双机跟随系统及方法。
背景技术:
1、网箱养殖是渔业养殖的重要形式之一,网箱养殖主要用于海水养殖,比如海水鱼类的养殖。随着网箱养殖规模的扩大,也伴随着一些问题,如藻类、贝类等附着物在网衣表面快速繁殖进而会导致网孔堵塞,影响了网箱内外水体交换,减少了溶氧量和食物供应,影响了鱼类的生长率和成活率,因此需要网衣清洗机器人来完成定期清洗网箱的工作。网箱清洗时,需要一对网衣清洗机器人共同夹持网衣进行同步动作,即两个网衣清洗机器人需要保持双机跟随状态。
2、目前,清洗网箱时,两个网衣清洗机器人在水下依靠光学识别apriltag码进行双机跟随。然而,网衣清洗机器人水下进行清洗作业时,会遇到水体变浑浊导致摄像头视野不佳的情况,此时仅依靠光学识别apriltag码难以保持双机跟随状态,从而使得机器清洗效率降低;而在水体污染严重的区域,光学识别apriltag码严重失效,双机无法通过机器视觉来实现跟随,进而无法实现网箱清洗。
技术实现思路
1、本发明的目的是为克服上述现有技术的不足,提供一种基于光学识别与电磁感应相结合的双机跟随系统及方法。
2、为实现上述目的,本发明采用如下技术方案:
3、基于光学识别与电磁感应相结合的双机跟随系统,包括主动网衣清洗机器人、被动网衣清洗机器人;
4、所述主动网衣清洗机器人、被动网衣清洗机器人相对的端面之间设置光学识别模块、电磁感应模块;
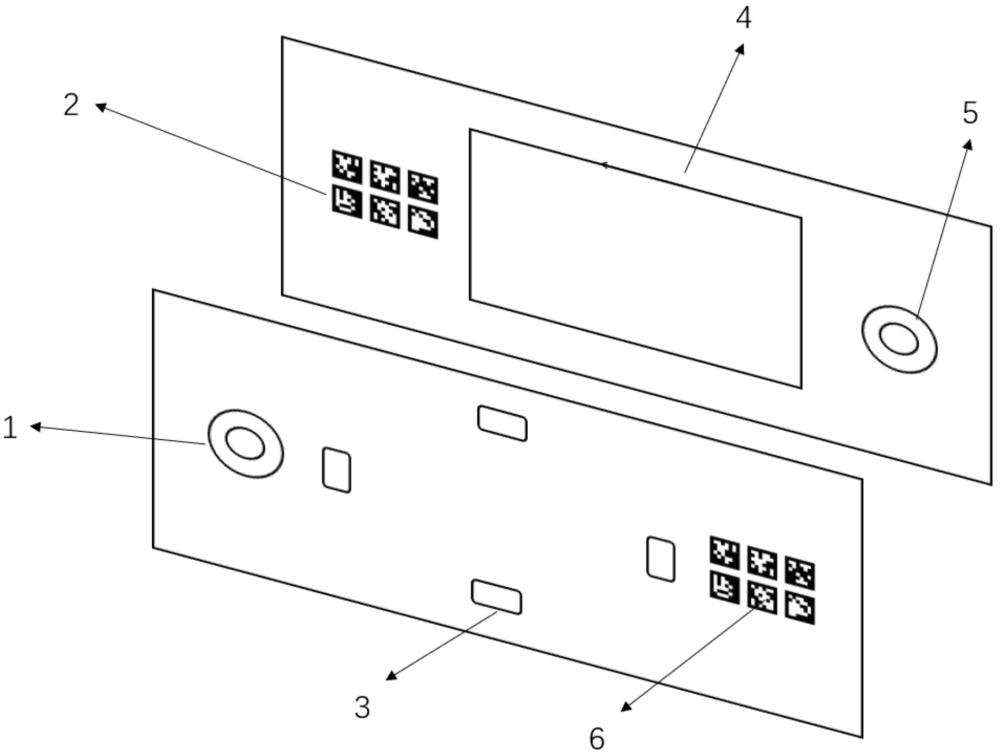
5、所述光学识别模块包括设置在主动网衣清洗机器人上的摄像头以及与摄像头相对应的设置在被动网衣清洗机器人上的apriltag码;所述摄像头与第一控制模块相连,所述第一控制模块根据摄像头的实时图像获取摄像头镜头中心与apriltag码中心轴线之间的垂直距离;
6、所述电磁感应模块包括设置在主动网衣清洗机器人上的若干电感器以及设置在被动网衣清洗机器人上的通电线圈;所述电感器、通电线圈均与第二控制模块相连,所述第二控制模块控制通电线圈的通断电,所述第二控制模块获取各个电感器产生的感应电动势;
7、所述第一控制模块、第二控制模块均与控制器相连,所述控制器与主动网衣清洗机器人、被动网衣清洗机器人的行走驱动系统相连;
8、所述第一控制模块能够获取摄像头镜头中心与apriltag码中心轴线之间的垂直距离时,所述控制器通过第二控制模块使通电线圈处于断电状态。
9、优选的,所述主动网衣清洗机器人、被动网衣清洗机器人对齐时,所述摄像头的镜头中心位于apriltag码的中心轴线上。
10、优选的,所述主动网衣清洗机器人、被动网衣清洗机器人之间还设置校准光学识别模块;
11、所述校准光学识别模块包括设置在被动网衣清洗机器人上的校准摄像头以及与校准摄像头相对应的设置在主动网衣清洗机器人上的校准apriltag码;所述校准摄像头与第三控制模块相连,所述第三控制模块根据校准摄像头的实时图像确定校准摄像头镜头中心与校准apriltag码中心轴线之间的垂直距离;
12、所述第三控制模块与控制器相连;
13、所述第一控制模块能够获取摄像头镜头中心与apriltag码中心轴线之间的垂直距离d1且第三控制模块能够获取校准摄像头镜头中心与校准apriltag码中心轴线之间的垂直距离d2时,所述控制器通过第二控制模块使通电线圈处于断电状态。
14、优选的,所述主动网衣清洗机器人、被动网衣清洗机器人对齐时,所述校准摄像头的镜头中心位于校准apriltag码的中心轴线上。
15、优选的,所述主动网衣清洗机器人上共设置四个电感器,其中两个电感器上下对齐设置,另外两个电感器左右对齐设置,四个电感器各自的中心点位于菱形的四个顶点上。
16、优选的,所述通电线圈呈矩形结构。
17、优选的,所述主动网衣清洗机器人、被动网衣清洗机器人对齐时,四个电感器包围在通电线圈的外部,上下对齐的两个电感器关于通电线圈呈对称设置,左右对齐的两个电感器关于通电线圈呈对称设置。
18、优选的,所述控制器接收四个电感器产生的感应电动势,并计算电磁感应模块测出的表示主动网衣清洗机器人、被动网衣清洗机器人在竖直方向上偏移程度的以及表示主动网衣清洗机器人、被动网衣清洗机器人在水平方向上偏移程度的;
19、 (1)
20、 (2)
21、式中,
22、为位于上部的电感器产生的感应电动势;
23、为位于下部的电感器产生的感应电动势;
24、为位于左侧的电感器产生的感应电动势;
25、为位于右侧的电感器产生的感应电动势。
26、本发明还公开一种基于光学识别与电磁感应相结合的双机跟随方法。
27、基于光学识别与电磁感应相结合的双机跟随方法,采用基于光学识别与电磁感应相结合的双机跟随系统进行实施,包括以下步骤:
28、步骤1:使主动网衣清洗机器人、被动网衣清洗机器人抓取网箱且对齐设置;
29、步骤2:控制器控制主动网衣清洗机器人、被动网衣清洗机器人的行走驱动系统以相同的初始速度同步启动;
30、步骤3:摄像头实时识别apriltag码,校准摄像头实时识别校准apriltag码;
31、当第一控制模块能够获取摄像头镜头中心与apriltag码中心轴线之间的垂直距离d1且第三控制模块能够获取校准摄像头镜头中心与校准apriltag码中心轴线之间的垂直距离d2时,进入步骤4;
32、否则进入步骤5;
33、步骤4:所述控制器通过第二控制模块使通电线圈处于断电状态;
34、控制器将垂直距离d1、垂直距离d2的平均值作为主动网衣清洗机器人、被动网衣清洗机器人之间的偏移距离;
35、当偏移距离超过偏移设定范围时,控制器控制被动网衣清洗机器人的行走驱动系统以降低偏移距离的形式进行行走;否则,进入步骤3;
36、步骤5:所述控制器通过第二控制模块使通电线圈处于通电状态;
37、所述控制器计算表示主动网衣清洗机器人、被动网衣清洗机器人在竖直方向上偏移程度的以及表示主动网衣清洗机器人、被动网衣清洗机器人在水平方向上偏移程度的;
38、当不超过竖直方向偏移程度设定范围且不超过水平方向偏移程度设定范围时,进入步骤3;否则,控制器控制被动网衣清洗机器人的行走驱动系统以降低偏移程度的形式进行行走。
39、本发明的有益效果是:
40、本发明双机跟随系统不再单独依靠光学识别模块、校准光学识别模块的光学识别,而是将光学识别和电磁感应模块的电磁感应相结合,使主动网衣清洗机器人、被动网衣清洗机器人可以自主根据水下环境切换跟随方式,双机可以更好的跟随,减少错位,提高了机器人对网箱的清洗效率;若水下环境良好,本发明优先依靠光学识别模块、校准光学识别模块进行光学识别跟随,当水体浑浊,透光性变差时,光学识别失效,切换至依靠电磁感应模块的电磁感应跟随,实现自主切换跟随方式,提高了环境适应能力。
本文地址:https://www.jishuxx.com/zhuanli/20240802/259408.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表