一种主被动结合散热的人工肌肉
- 国知局
- 2024-08-05 11:43:21
本发明涉及柔性驱动和仿生制造领域,尤其是涉及一种主被动结合散热的人工肌肉。
背景技术:
1、近年来,随着新型智能材料的研究与仿生技术的发展,软体机器人已经成为机器人研究的热点。软体机器人作为机器人技术的新兴领域,其核心在于利用质地柔软、性能稳定的材料来设计和制造机器人。软体驱动器作为软体机器人的核心部件,扮演着类似人体肌肉的角色,因此又被称为人工肌肉。它主要用于实现软体机器人的各种动作,如弯曲、扭转、收缩变形等,从而驱动整个机器人产生运动。形状记忆合金具有超弹性和形状记忆效应,且因其能量密度高、载重自重比大、循环稳定性好以及驱动结构一体化等因素,被认为是制造人工肌肉的理想材料。然而,形状记忆合金人工肌肉通常表现出有限的带宽和响应速度,这是因为材料的两种相变(马氏体和奥氏体之间的转变)都会延迟加热和冷却速率,尤其是加热后完全冷却所需时间较长。因此,形状记忆合金的冷却速度直接制约了人工肌肉的响应速度。
2、经过检索,申请公布号cn115681048a公开了一种形状记忆合金驱动器,该驱动器采用喷射冷却喷雾的方式对形状记忆合金弹簧进行降温冷却,提升了驱动器的响应速度。然而,这种冷却形式需要外置储液罐、电磁阀结构以及喷雾结构,一定程度上增加了系统的复杂性,不利于驱动器的小型化。
3、授权公告号cn214160774u公开了一种管道清灰机器人,该机器人利用形状记忆合金驱动器具有对环境刺激直接反应的特性,代替传统的电动,降低了机器人的机械复杂度,进一步减小了机器人的尺寸。然而,由于未考虑形状记忆合金的散热问题,该机器人的驱动速度相对较慢,一定程度上限制了其应用范围。
4、申请公布号cn113459077a公开了一种形状记忆合金软体驱动器,采用高导热柔性基底和散热涂层的方式加速形状记忆合金的冷却。然而,这种高导热柔性基底的导热效果有限,难以大幅提升驱动器的响应速度。
5、申请公布号cn115366085a公开了一种快速响应的多模态形状记忆合金软体驱动器,包括凝胶包裹层、驱动模块、柔性包裹层,其中驱动模块封装在凝胶包裹层内部,柔性包裹层粘附于凝胶包裹层底端。但该现有技术主要通过水凝胶进行被动散热,散热性能有限。
6、综上所述,如何设计一种散热性能强且结构简洁的人工肌肉为需要解决的技术问题。
技术实现思路
1、本发明的目的在于克服上述现有技术存在的结构复杂或散热性能较差的缺陷,提供一种主被动结合散热的人工肌肉。
2、本发明的目的可以通过以下技术方案来实现:
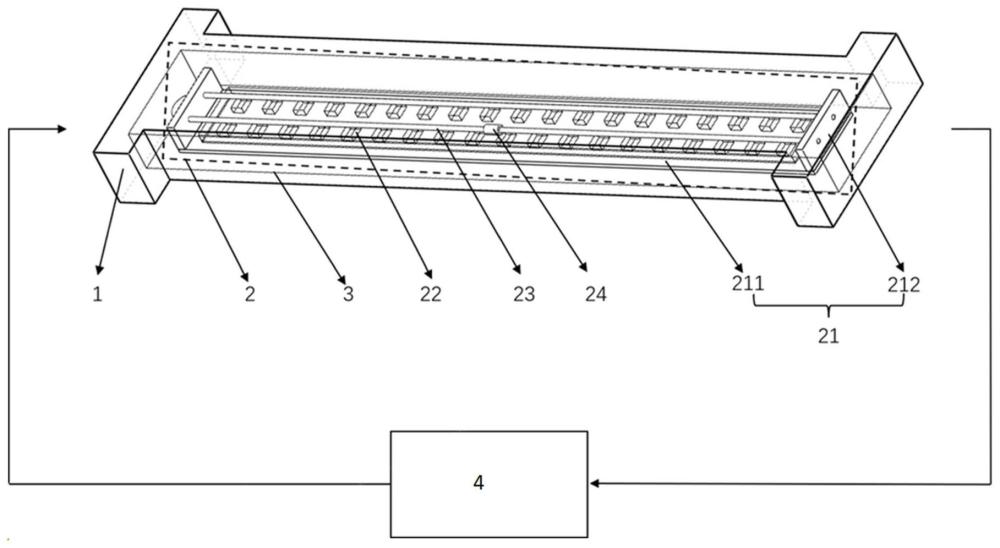
3、根据本发明的一个方面,提供了一种主被动结合散热的人工肌肉,从外到内依次包括硅胶基底层、水凝胶基底层和驱动传感组件,所述驱动传感组件包括支撑板以及安装在支撑板上的柔性热电层和形状记忆合金丝,所述柔性热电层位于形状记忆合金丝一侧,通电时一面吸热另一面放热,其中通电方向不同则吸热面和放热面不同。
4、作为优选的技术方案,所述的柔性热电层包括np型热电颗粒,所述np型热电颗粒包括多个p型热电颗粒和多个n型热电颗粒,所述p型热电颗粒和n型热电颗粒交替排布,排布后所有np型热电颗粒串联。
5、作为优选的技术方案,所述的柔性热电层还包括镍布、铜丝和液态金属,所述np型热电颗粒一面通过镍布连接,另一面通过液态金属和铜丝连接。
6、作为优选的技术方案,所述的液态金属涂覆在np型热电颗粒一面,所述铜丝通过液态金属与np型热电颗粒固连。
7、作为优选的技术方案,所述的np型热电颗粒为碲化铋颗粒。
8、作为优选的技术方案,所述的np型热电颗粒串联后通过水凝胶外层灌封。
9、作为优选的技术方案,所述的水凝胶基底层和水凝胶外层由琼脂/聚丙烯酰胺双网络水凝胶制成。
10、作为优选的技术方案,该人工肌肉还包括控制器,所述驱动传感组件还包括温度传感器,所述温度传感器位于形状记忆合金丝中部,采集形状记忆合金丝的温度并反馈至控制器,所述控制器调节柔性热电层的通电方向和幅值。
11、作为优选的技术方案,所述的支撑板包括中间板和固定板,所述固定板为两块,分别固定在中间板两端,所述固定板上设有定位孔,所述形状记忆合金丝的两端穿过定位孔固定在固定板上且处于绷直状态。
12、作为优选的技术方案,所述的中间板为聚氯乙烯材质,所述固定板为铁片。
13、与现有技术相比,本发明具有以下有益效果:
14、1)本发明采用水凝胶基底层和柔性热电层实现了主被动结合散热,水凝胶基底层在受热时通过水分蒸发带走大量热量,实现对形状记忆合金丝的被动散热,柔性热电层通电后一面吸热另一面放热,可实现对形状记忆合金丝温度的主动调节;硅胶基底层包裹水凝胶基底层,既可以起到支撑和保护的作用,还可以延长水凝胶基底层的寿命,保持其吸水性能;
15、2)本发明通过温度传感器和控制器,获取形状记忆合金丝在驱动过程中的温度,实时调节柔性热电层的通电情况,能优化柔性热电层能源利用率,并进一步提高人工肌肉的响应速度;
16、3)本发明柔性热电层具有结构简单、体积小、弯曲性能良好、温度响应快等特点,是一种小型、高效的主动降温结构;相较于传统的水冷、风冷等主动冷却形式,机械复杂度小,能够显著提高人工肌肉的响应速度;
17、4)本发明采用琼脂/聚丙烯酰胺双网络水凝胶制成水凝胶基底层和水凝胶外层,该水凝胶质地柔软、力学性能良好,具有高吸水和保水性;在受热时,通过水分蒸发带走大量热量,相比于高导热柔性基底,具有更大的散热能力,能够大幅提高人工肌肉的响应速度;
18、5)本发明结构简单且制造成本低,易于加工。
技术特征:1.一种主被动结合散热的人工肌肉,其特征在于,从外到内依次包括硅胶基底层(1)、水凝胶基底层(3)和驱动传感组件(2),所述驱动传感组件(2)包括支撑板(21)以及安装在支撑板(21)上的柔性热电层(22)和形状记忆合金丝(23),所述柔性热电层(22)位于形状记忆合金丝(23)一侧,通电时一面吸热另一面放热,其中通电方向不同则吸热面和放热面不同。
2.根据权利要求1所述的一种主被动结合散热的人工肌肉,其特征在于,所述的柔性热电层(22)包括np型热电颗粒(221),所述np型热电颗粒(221)包括多个p型热电颗粒(2211)和多个n型热电颗粒(2212),所述p型热电颗粒(2211)和n型热电颗粒(2212)交替排布,排布后所有np型热电颗粒(221)串联。
3.根据权利要求2所述的一种主被动结合散热的人工肌肉,其特征在于,所述的柔性热电层(22)还包括镍布(222)、铜丝(223)和液态金属(224),所述np型热电颗粒(221)一面通过镍布(222)连接,另一面通过液态金属(224)和铜丝(223)连接。
4.根据权利要求3所述的一种主被动结合散热的人工肌肉,其特征在于,所述的液态金属(224)涂覆在np型热电颗粒(221)一面,所述铜丝(223)通过液态金属(224)与np型热电颗粒(221)固连。
5.根据权利要求2所述的一种主被动结合散热的人工肌肉,其特征在于,所述的np型热电颗粒(221)为碲化铋颗粒。
6.根据权利要求2所述的一种主被动结合散热的人工肌肉,其特征在于,所述的np型热电颗粒(221)串联后通过水凝胶外层(225)灌封。
7.根据权利要求6所述的一种主被动结合散热的人工肌肉,其特征在于,所述的水凝胶基底层(3)和水凝胶外层(225)由琼脂/聚丙烯酰胺双网络水凝胶制成。
8.根据权利要求1所述的一种主被动结合散热的人工肌肉,其特征在于,该人工肌肉还包括控制器(4),所述驱动传感组件(2)还包括温度传感器(24),所述温度传感器(24)位于形状记忆合金丝(23)中部,采集形状记忆合金丝(23)的温度并反馈至控制器(4),所述控制器(4)调节柔性热电层(22)的通电方向和幅值。
9.根据权利要求1所述的一种主被动结合散热的人工肌肉,其特征在于,所述的支撑板(21)包括中间板(211)和固定板(212),所述固定板(212)为两块,分别固定在中间板(211)两端,所述固定板(212)上设有定位孔(2121),所述形状记忆合金丝(23)的两端穿过定位孔(2121)固定在固定板(212)上且处于绷直状态。
10.根据权利要求9所述的一种主被动结合散热的人工肌肉,其特征在于,所述的中间板(211)为聚氯乙烯材质,所述固定板(212)为铁片。
技术总结本发明涉及一种主被动结合散热的人工肌肉,从外到内依次包括硅胶基底层、水凝胶基底层和驱动传感组件,驱动传感组件包括支撑板以及安装在支撑板上的柔性热电层和形状记忆合金丝,柔性热电层位于形状记忆合金丝一侧,通电时一面吸热另一面放热,通电方向不同则吸热面和放热面不同。与现有技术相比,本发明采用水凝胶基底层和柔性热电层实现了主被动结合散热,硅胶基底层包裹水凝胶基底层,可以起到支撑和保护的作用;通过温度传感器和控制器,实时调节柔性热电层的通电情况,优化了柔性热电层能源利用率;柔性热电层结构简单、体积小、弯曲性能良好且温度响应快,能够显著提高人工肌肉的响应速度。技术研发人员:张泉,陈豪,易思成,曾亮,徐良,李龙,岳涛,钟宋义,彭艳受保护的技术使用者:上海大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/259019.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表