一种双电机并联结构的机械臂
- 国知局
- 2024-08-05 11:46:04
本发明涉及机器人,具体为一种双电机并联结构的机械臂。
背景技术:
1、在机器人技术中,机械臂广泛应用于各类医疗、交通、建筑、工业和服务等领域。目前,传统机械臂分为串联式机械臂和并联式机械臂,串联式机械臂是开放式结构,通过运动方程逆运算反算出机械臂位置和姿态信息,具有较大操作范围和较好灵活性,由于因开放工作模式,会存在累积误差,且其串联结构,逐级逆运算反算出每个关节位置和姿态信息,不太适应快速高精度抓取工作。并联式机械臂属于闭合式结构,具有三个及以上的多个臂段连接结构,并联逆运算反算出每个关节位置和姿态信息,可分担负载,稳定性好,可进行高精度控制,但因多个臂段的耦合结构,运动控制程序量大,结构维护工作量且复杂。
技术实现思路
1、为了克服背景技术中的不足,本发明公开了双电机并联结构的机械臂,这种机械臂只需二个臂段连接结构,通过二个电机同向或反向运动,可实现二个臂段连接结构水平上下的平面运动(xy轴平面运动),再增加与个旋转电机带动二个臂段连接结构作正反转运动,可获得水平上下左右的三维运动(xyz轴三维空间运动),整个过程无需列逆运算反算方程,其程序控制方便,安装拆除方便,各零件通用性好,易于维护。实现本发明目的的技术方案是:
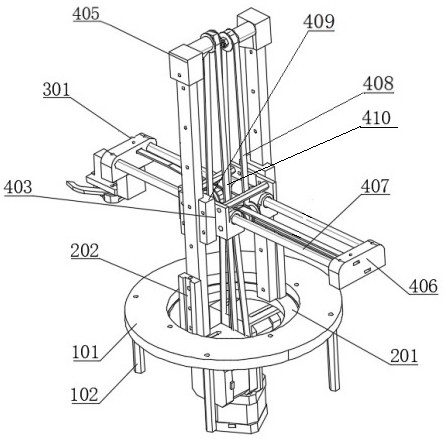
2、双电机并联结构的机械臂包括带惰轮伸缩升降双电机401、双电机固定板402、第一同步带408、第二同步带410、上下升降带惰轮固定阻挡板405、上下升降轨404、上下升降滑块409、上下升降轨固定柱202、双惰轮水平滑块403、水平块限位板406、水平伸缩滑动杆407、旋转装置201、旋转电机203、旋转传动杆204、旋转装置固定座101、固定支脚102、末端夹持电机301、末端夹持固定板302、传动齿轮303和传动齿圈304。
3、所述的带惰轮伸缩升降双电机401固定在所述的双电机固定板402上,并一起固定在所述的旋转装置201,所述的带惰轮伸缩升降双电机401通过所述的第一同步带408和第二同步带410垂直方向皮带,连接到所述的上下升降带惰轮固定阻挡板405的惰轮构成了机械臂左右两个臂段的结构,该结构再通过所述的上下升降轨404和所述的上下升降轨固定柱202回到所述的旋转装置201上进行固定,从而构成闭环式双电机并联两个臂段上下运动结构。
4、所述的带惰轮伸缩升降双电机,是把惰轮装配在其伸缩升降双电机的轴上,构成带惰轮伸缩升降双电机,其伸缩升降双电机优选为步进电机。
5、所述的双惰轮水平滑块403,装配在所述的水平伸缩滑动杆407上,通过所述的双惰轮水平滑块403的双惰轮,将所述的上下升降带惰轮固定阻挡板405的惰轮延伸出的第一同步带408、第二同步带410垂直方向皮带换向成水平方向皮带,并将其水平方向皮带固定到所述的水平块限位板406,通过此类绕行方式,让所述的第一同步带408、第二同步带410形成垂直水平方向的闭环回路,构成出两个臂段的水平运动结构。
6、所述的双惰轮水平滑块403在所述的水平伸缩滑动杆407上作水平运动,通过所述的水平块限位板406限定水平运动范围。
7、所述的双惰轮水平滑块403垂直面与上下升降滑块409固定在一起,将机械臂的两个臂段上下运动结构和两个臂段水平运动结构耦合在一起,通过控制双电机同向反向运动,实现双电机并联机械臂的伸缩升降运动(水平上下运动),即机械臂xy方向的平面运动。
8、所述的双惰轮水平滑块403一端是双惰轮,另一端是与上下升降滑块409固定在一起。
9、为增强本发明的机械臂操作范围和灵活性,在机械臂xy方向平面运动的基础上,添加了方便拆装的机电转动结构,增加机械臂的z轴方向运动,让机械臂具备xyz方向的三维运动。具体为所述的旋转装置201通过所述的旋转传动杆204和所述的旋转电机203固定在旋转装置固定座101上;为进一步方便该机械臂能搭载于其它运动平台上,再增加了所述的固定支脚102。
10、所述的旋转电机,优选为步进电机或伺服电机。
11、为进一步提升了本发明机械臂末端灵活性,安装了方便拆装的机电抓取结构。具体为所述的末端夹持电机301固定在末端夹持固定板302,再通过所述的传动齿轮303和所述的传动齿圈304,构造出机械臂的末端夹持或抓取功能。
12、所述的夹持电机,优选为直流电机或步进电机。
13、本发明采用上述结构后,具有如下有益效果:
14、双电机并联结构的机械臂结构,通过两个臂段结构实现了多个臂段结构同样运动功能,具有高稳定、高速高精度优点,且结构简单。
15、双电机并联结构的机械臂结构,其运动控制只需要同向或反向控制,程序控制简单,均是通用性零件,安装拆除方便,易于维护。
16、增强机械臂自由度和拓展性,不仅在机械臂上增加机电转动和固定支脚结构,还添加了末端机电抓取结构,提升了机械臂操作范围和灵活性。
技术特征:1.一种双电机并联结构的机械臂,包括闭环式双电机并联两个臂段构成的上下运动结构和水平运动结构;
2.根据权利要求1所述机械臂,所述水平结构末端的末端夹持固定板(302)上固定有末端夹持电机(301),并通过传动齿轮(303)和传动齿圈(304)实现所述机械臂的末端夹持或抓取功能。
3.根据权利要求2所述机械臂,所述旋转装置固定座(101)的下面装有固定支脚(102)。
4.根据权利要求3所述机械臂,所述带惰轮伸缩升降双电机(401)为步进电机,所述旋转电机(203)为步进电机或伺服电机。
5.根据权利要求1至4中任意一项所述机械臂,根据指定位置的坐标,控制中心通过can或rs485总线向电机控制系统发送xy方向到达位置的控制指令,电机控制系统的电机进入pid(比例积分微分)位置环模式,所述带惰轮伸缩升降双电机以一定速度同方向转动使所述机械臂的末端到达x方向位置点,然后所述带惰轮伸缩升降双电机以反方向转动到达y方向位置点,电机速度变为零,完成所述机械臂xy方向运动;最后,所述旋转电机以同样的pid(比例积分微分)位置环模式到达在z方向位置点,从而完成到达所述指定位置,然后所述机械臂的末端完成夹持或抓取。
6.根据权利要5所述机械臂,所述控制中心在控制过程中出现故障或超出安全工作范围时,进入故障诊断模式。
技术总结本发明涉及机器人技术领域,具体为一种双电机并联结构的机械臂,本发明公开的机械臂只需二个臂段连接结构,通过二个电机同向或反向运动,可实现二个臂段连接结构水平上下的平面运动(XY轴平面运动),再增加与个旋转电机带动二个臂段连接结构作正反转运动,可获得水平上下左右的三维运动(XYZ轴三维空间运动),整个过程无需列逆运算反算方程,其程序控制方便,安装拆除方便,各零件通用性好,易于维护。技术研发人员:秦运柏,何润卓,梁广怀,王龙林,朱君,王希瑞,罗胜安,陈露菲受保护的技术使用者:广西师范大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/259285.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表