控制系统、装载机械及控制方法与流程
- 国知局
- 2024-08-22 14:44:08
本说明书所公开的技术涉及一种控制系统、装载机械及控制方法。
背景技术:
1、在具备作业机的装载机械的技术领域中,已知有如专利文献1中公开的、能够执行高效的挖掘动作的装载机械。
2、专利文献1:日本特开2019-203381号公报
技术实现思路
1、装载机械在利用作业机对挖掘对象进行挖掘后,将挖掘物装载至运载车辆中。理想的是能够调整从作业机装载至运载车辆中的挖掘物的重量,使得挖掘物以最合适的装载量装载至运载车辆中。为了优化装载机械的装载作业,需要了解挖掘对象的物性。作为挖掘对象的物性参数之一,可例举土压力系数。
2、本说明书所公开的技术的目的在于计算挖掘对象的土压力系数。
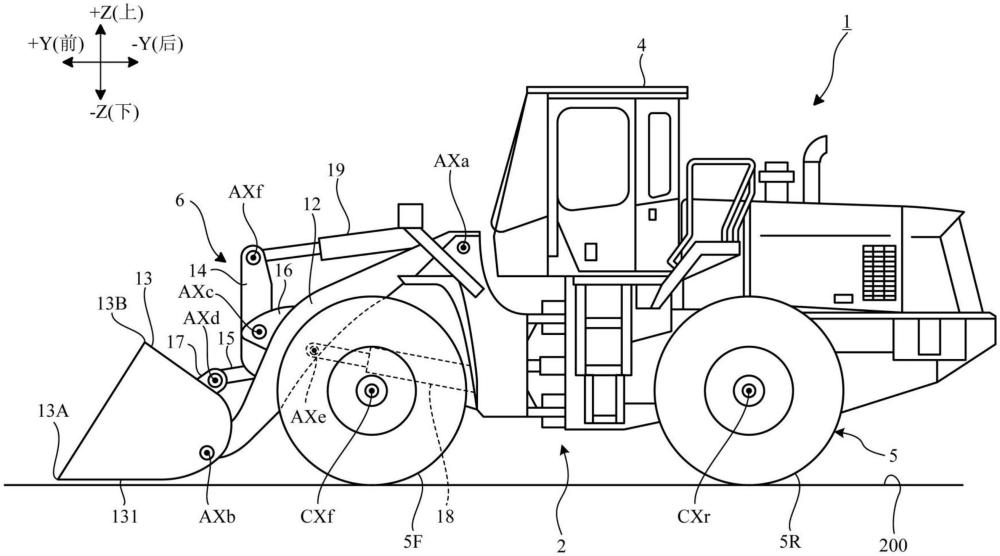
3、本说明书公开一种装载机械的控制系统。装载机械具备具有铲斗的作业机。控制系统具备控制器。控制器在利用铲斗对挖掘对象进行挖掘的挖掘作业中计算装载机械的牵引力。控制器对表示挖掘作业中的铲斗内侧的挖掘对象的高度的荷载高度进行计算。控制器基于牵引力及荷载高度,计算挖掘对象的土压力系数。
4、根据本说明书所公开的技术,能够计算挖掘对象的土压力系数。
技术特征:1.一种控制系统,其用于对具备作业机的装载机械进行控制,所述作业机具有铲斗,所述控制系统的特征在于,
2.根据权利要求1所述的控制系统,其特征在于,
3.根据权利要求2所述的控制系统,其特征在于,
4.根据权利要求3所述的控制系统,其特征在于,
5.根据权利要求4所述的控制系统,其特征在于,
6.一种装载机械,其特征在于,
7.一种控制方法,其用于对具备作业机的装载机械进行控制,所述作业机具有铲斗,所述控制方法的特征在于,
技术总结用于对具备作业机的装载机械进行控制的控制系统具备控制器,所述作业机具有铲斗。控制器在利用铲斗对挖掘对象进行挖掘的挖掘作业中计算装载机械的牵引力。控制器对表示挖掘作业中的铲斗内侧的挖掘对象的高度的荷载高度进行计算。控制器基于牵引力及荷载高度,计算挖掘对象的土压力系数。技术研发人员:大浅贵央,菊地正蔵,工藤棱太,小野寺由孝,小松健浩受保护的技术使用者:株式会社小松制作所技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/279651.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表