一种基于FSM模型的露天采矿卡车设备状态判断方法与流程
- 国知局
- 2024-08-22 14:57:26
本发明涉及设备状态判断,更具体地说,本发明涉及一种基于fsm模型的露天采矿卡车设备状态判断方法。
背景技术:
1、露天采矿是一种重要的矿产资源开采方式,露天采矿作业大致可以分为穿孔、爆破、铲装、运输、卸载五大环节。在露天采矿设备中,矿用卡车是最常见的运输设备,它直接参与了铲装、运输和卸载环节。在铲装环节,卡车设备运行至挖机或电铲等铲装设备作业范围内,由铲装设备给卡车装载矿石。在装载完成后,卡车设备进入运输环节,卡车通过在矿区道路上行驶,将矿石运送至卸载点,常见的卸载点包括排土场、破碎站、溜井等。卡车到达卸载点后,进入卸载环节,即将卡车中的矿石物料卸载至卸载点内。卡车完成卸载任务后驶离,重新前往装载点进入铲装环节。
2、传统的卡车状态判断是通过司机手动点击车载终端按钮进行人工上报,已经成为许多露天矿山中常见的操作。在这种方式下,司机会在驾驶卡车或挖机(或电铲)的过程中,根据自己的观察和经验,判断车辆的状态是否正常,然后手动点击车载终端上的按钮,选择相应的状态选项进行上报。
3、但是其在实际使用时,仍旧存在一些缺点,如不考虑工艺流程的逻辑性和车辆状态之间的关系,不仅卡车状态类型数量少,而且由于信号延迟、定位偏差等问题,常常出现误判。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种基于fsm模型的露天采矿卡车设备状态判断方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
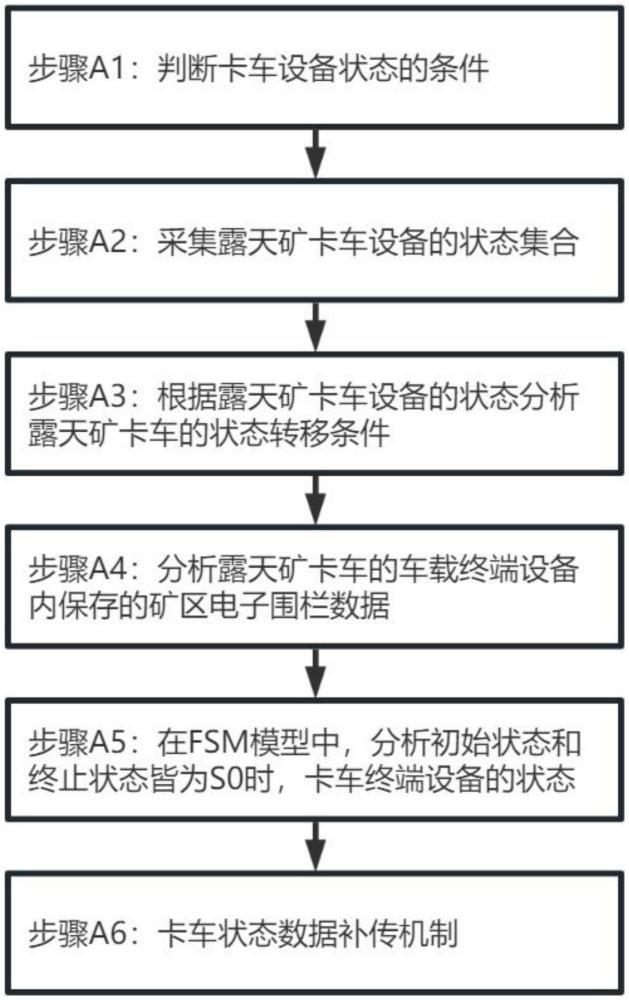
3、步骤a1:判断卡车设备状态的条件;
4、步骤a2:采集露天矿卡车设备的状态集合;
5、步骤a3:根据露天矿卡车设备的状态分析露天矿卡车的状态转移条件;
6、步骤a4:分析露天矿卡车的车载终端设备内保存的矿区电子围栏数据;
7、步骤a5:在fsm模型中,分析初始状态和终止状态皆为s0时,卡车终端设备的状态;
8、步骤a6:卡车状态数据补传机制。
9、优选的,所述步骤a1中,判断卡车设备状态涉及的条件为:速度状态、车载定位、电子围栏;
10、所述速度状态,由卡车行驶速度判断,行驶速度等于0km/h,则表示卡车为停止状态,行驶速度大于0km/h,则表示卡车为行驶状态;
11、所述电子围栏,由管理员在卡车调度系统中绘制,包括装载区、卸载区、装载等候区、卸载等候区;
12、所述车载定位,用于确定卡车在矿区的确切位置和方向,通过gps定位技术,实时追踪卡车的位置,确定露天矿卡车当前位置和运动方向。
13、优选的,所述步骤a2中,露天矿卡车设备的状态集合包括:
14、s0:停机;此时卡车终端设备关机;
15、s1:空载停车;此时卡车停止且空载;
16、s2:空载运输;此时卡车行驶且空载;
17、s3:等待装载;此时卡车停止、空载且在装载等候区内;
18、s4:装载中;此时卡车停止且在装载区内;
19、s5:重载运输;此时卡车行驶且重载;
20、s6:重载停车;此时卡车停止且重载;
21、s7:等待卸载;此时卡车停止、重载且在卸载等候区内;
22、s8:卸载中;此时卡车停止且在卸载区内。
23、优选的,所述步骤a3中,露天矿卡车的状态转移条件方法具体为:
24、t0:当卡车处于“s0停机”状态时,若卡车终端开机,则卡车状态转换为“s1空载停车”;
25、t1:当卡车处于“s1空载停车”状态时,若速度状态转换为行驶,则卡车状态转换为“s2空载运输”;
26、t2:当卡车处于“s2空载运输”状态时,若进入装载等候区,且速度状态转换为停止,则卡车状态转换为“s3等待装载”;
27、t3:当卡车处于“s3等待装载”状态时,若速度状态转换为行驶,则卡车状态转换为“s2空载运输”;
28、t4:当卡车处于“s2空载运输”状态时,若进入装载区,且速度状态转换为停止,则卡车状态转换为“s4装载中”;
29、t5:当卡车处于“s4装载中”状态时,若速度状态为行驶,且离开装载区,则卡车状态转换为“s5重载运输”;
30、t6:当卡车处于“s5重载运输”状态时,若速度状态转化为停止,且卡车不在装载区、装载等候区、卸载区、卸载等候区范围内,则卡车状态转换为“s6重载停车”;
31、t7:当卡车处于“s6重载停车”状态时,若速度状态转换为行驶,则卡车状态转换为“s5重载运输”;
32、t8:当卡车处于“s5重载运输”状态时,若进入卸载等候区,且速度状态为停止,则卡车状态转换为“s7等待卸载”;
33、t9:当卡车处于“s7等待卸载”状态时,若速度状态转换为行驶,则卡车状态转换为“s5重载运输”;
34、t10:当卡车处于“s5重载运输”状态时,若进入卸载区,且速度状态转换为停止,卡车状态转换为“s8卸载中”;
35、t11:当卡车处于“s8卸载中”状态时,若速度状态为行驶,且离开卸载区,卡车状态转换为“s2空载运输”;
36、t12:当卡车处于“s2空载运输”状态时,若速度状态转换为停止,且卡车不在装载区、装载等候区、卸载区、卸载等候区范围内,则卡车状态转换为“s1空载停车”;
37、t13:当卡车处于“s1空载停车”状态时,若设备关机,卡车状态转换为“s0停机”。
38、优选的,所述步骤a4中,车载终端按照步骤a2至步骤a4,根据速度状态与卡车出入电子围栏情况,判断卡车设备的状态,并且实时将卡车状态数据上传至调度系统;车载终端本地也会保存最近一段时间内的所有状态数据;状态数据包括卡车新状态与新状态的转换时间。
39、优选的,所述步骤a5中,当卡车处于s0停机状态时,系统应确保相关设备处于关闭状态,以节省能源和保护设备;从初始状态s0开始,当卡车接收到启动指令后,系统根据车载定位、电子围栏和速度状态条件,进行状态的切换和决策。
40、优选的,所述步骤a6中,调度系统在每一次收到车载终端上传的状态数据时,都会回复确认信息,若车载终端在信号不良区域没有收到调度系统回复的确认信息,则在信号强度良好时再次尝试上传,若在此期间内,卡车产生新的状态数据,则在上传新状态时,将未成功上传的状态数据与新的状态数据合并上传;由于卡车在运输作业期间,不断在装载点与卸载点之间往返,运动范围很大,在每一趟运输途中,都能够经过信号良好的区域,从而可以保障车辆状态数据成功补传。
41、本发明的技术效果和优点:
42、1、仅靠车辆速度状态与车辆出入电子围栏的情况即可判断露天矿卡车设备的运行状态,判断条件简单,状态种类丰富,判断效率高,能够有效支持调度系统运行;能够根据判断条件,自动判断露天矿卡车设备运行状态,不需要人工手动上报,既能够适用于有人驾驶场景,也能够适用于无人驾驶场景。
43、2、采用fsm模型,限制了各状态之间的转换条件,而非简单粗暴地根据定义直接判断车辆状态,避免了车辆状态之间的不合理转换,保障了状态判断的准确性;采用fsm模型,将各状态以及各状态之间的转换条件解耦,降低程序耦合度,能够有效降低软件开发与维护成本。
44、3、由于判断条件简单,计算量小,可以由车载终端直接完成判断任务,车载终端只需将判断结果上传至卡调系统,而无需上传轨迹、速度等原始数据,减小了车载终端与调度系统之间的通讯压力;对于部分矿区信号不良的问题,利用卡车设备运动范围大的特点,设计了状态数据补传机制,能够有效地解决在矿区局部信号覆盖不良的情况下,卡车设备状态判断不准确的问题,对于调度系统准确下发调度指令以及统计卡车实动率等具有积极意义。
本文地址:https://www.jishuxx.com/zhuanli/20240822/280567.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表