BSD摄像头偏移预警方法、装置及电子设备与流程
- 国知局
- 2024-08-22 14:57:36
本发明涉及图像处理,尤其涉及一种bsd摄像头偏移预警方法、装置及电子设备。
背景技术:
1、公交车由于轴距长,车身大,内外轮差大,造成公交车盲区死角多,因此换道行驶,进出公交站台,转弯,上下客的时候极易发生交通事故。当前技术条件下,可以在车辆侧后方分别安装一个广角摄像头,通过盲区监测系统(blind spot detection,bsd)实时监测车辆两侧危险区域行人或骑车人员并及时预警。应用bsd算法对摄像头的安装角度有严格要求,通常,在根据车况完成摄像头底座安装和角度调整后,会对bsd算法危险区域进行标定,并使用强力胶和螺丝固定摄像头底座位置和摄像头拍摄角度,实际应用中,由于bsd摄像头裸露在外,长期风吹日晒,偶尔存在树枝猛击,且车辆颠簸,可能引起摄像头偏移,进而导致bsd算法标定的危险区域存在偏差,产生误报。
2、专利cn202211534490.4公开一种摄像头偏移检测方法及其相关装置。其中,该方法包括:获取由目标摄像头采集的实时监控图像,并从实时监控图像中获取第一感兴趣区域图像;检测第一感兴趣区域图像的关键特征点,其中,第一感兴趣区域图像的关键特征点表征第一感兴趣区域图像中一个或者多个几何形状的特征点的中心点;根据第一感兴趣区域图像的关键特征点与预先存储的基准特征点之间的位置偏移量,检测目标摄像头的位姿偏移程度。现有技术适用于对静止摄像头画面的偏移识别,无法高效、准确地实现对移动的公交车bsd摄像头的左右偏移和旋转偏移识别。
技术实现思路
1、本发明的目的在于提供一种bsd摄像头偏移预警方法、装置及电子设备,以解决现有技术无法高效、准确地实现对移动的公交车bsd摄像头的左右偏移和旋转偏移识别的问题。
2、第一方面,本发明提供一种bsd摄像头偏移预警方法,包括:
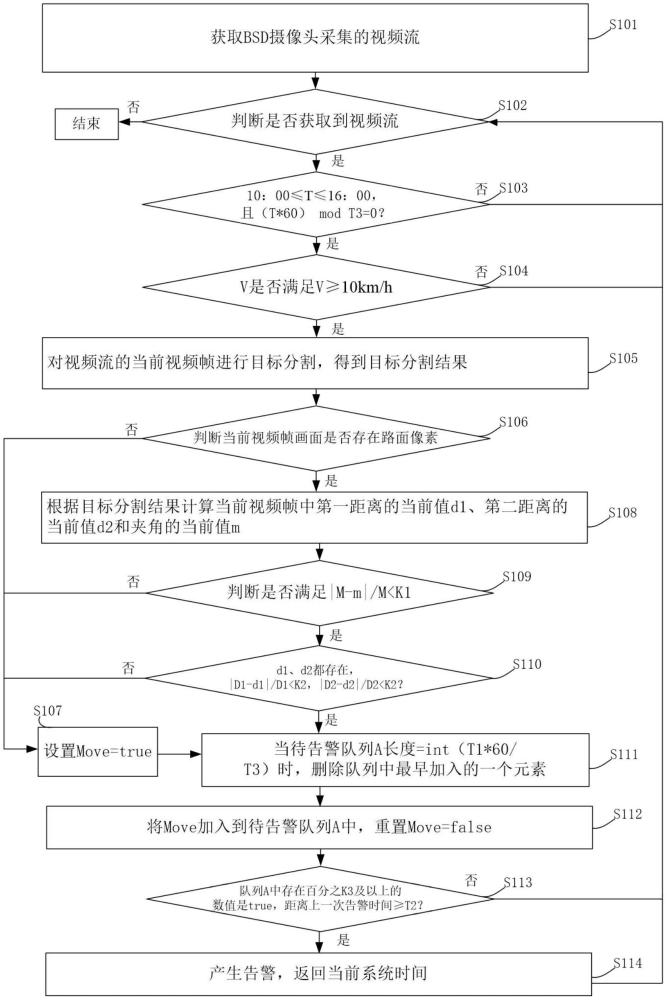
3、获取bsd摄像头采集的视频流;预先进行初始化设置,输入盲区检测左右侧标识符、告警持续时间阈值t1、告警间隔阈值t2,取帧间隔t3,待告警队列a,队列长度为int(t1*60/t3),当前帧偏移标志位move=false;判定阈值k1,k2,k3;预先计算并记录第一距离的初始值d1、第二距离的初始值d2和夹角的初始值m;第一距离为第一高度下地面最边缘像素到画面边缘的距离,第一距离为第二高度下地面最边缘像素到画面边缘的距离;夹角为地面最边缘像素连线和水平方向的夹角;
4、对视频流的当前视频帧进行目标分割,得到目标分割结果;
5、根据目标分割结果计算当前视频帧中第一距离的当前值d1、第二距离的当前值d2和夹角的当前值m;
6、判断是否满足|m-m|/m<k1;
7、如果否,设置move=true;
8、如果是,判断是否满足d1、d2都存在,且|d1-d1|/d1<k2和|d2-d2|/d2<k2;
9、如果否,设置move=true;
10、如果是,当待告警队列a长度=int(t1*60/t3)时,删除队列中最早加入的一个元素;
11、将move加入到待告警队列a中,重置move=false;
12、判断是否队列a中存在百分之k3及以上的数值是true,且距离上一次告警时间≥t2;
13、如果是,产生告警,返回当前系统时间;
14、如果否,进行下一帧判断。
15、进一步地,获取bsd摄像头采集的视频流之后,所述方法还包括:
16、判断是否获取到视频流;
17、如果获取到视频流,则进行下一步;
18、如果未获取到视频流,则结束算法流程。
19、进一步地,获取到视频流之后,所述方法还包括:
20、判断当前系统时间t是否满足10:00≤t≤16:00,且(t*60)mod t3=0;
21、如果当前系统时间t满足10:00≤t≤16:00,且(t*60)mod t3=0,则进行下一步;
22、如果当前系统时间t不满足10:00≤t≤16:00,且(t*60)mod t3=0,则进行下一帧判断。
23、进一步地,如果当前系统时间t满足10:00≤t≤16:00,且(t*60)mod t3=0,所述方法还包括:
24、判断当前行车速度v是否满足v≥10km/h;
25、如果当前行车速度v满足v≥10km/h,则进行下一步;
26、如果当前行车速度v不满足v≥10km/h,则进行下一帧判断。
27、进一步地,对视频流的当前视频帧进行目标分割,得到目标分割结果之后,所述方法还包括:
28、判断当前视频帧画面是否存在路面像素;
29、如果当前视频帧画面存在路面像素,则进行下一步;
30、如果当前视频帧画面不存在路面像素,则设置move=true。
31、进一步地,判断当前视频帧画面是否存在路面像素,包括:
32、获取目标分割结果中的路面掩膜分割结果;掩膜尺寸和原图尺寸一致,像素判断为路面的像素对应值为1,否则为0;对掩膜像素值进行求和,求和结果大于0,则认为画面存在路面像素;求和结果等于0,则认为画面不存在路面像素。
33、第二方面,本发明提供一种bsd摄像头偏移预警装置,包括:
34、获取单元,用于获取bsd摄像头采集的视频流;预先进行初始化设置,输入盲区检测左右侧标识符、告警持续时间阈值t1、告警间隔阈值t2,取帧间隔t3,待告警队列a,队列长度为int(t1*60/t3),当前帧偏移标志位move=false;判定阈值k1,k2,k3;预先计算并记录第一距离的初始值d1、第二距离的初始值d2和夹角的初始值m;第一距离为第一高度下地面最边缘像素到画面边缘的距离,第一距离为第二高度下地面最边缘像素到画面边缘的距离;夹角为地面最边缘像素连线和水平方向的夹角;
35、分割单元,用于对视频流的当前视频帧进行目标分割,得到目标分割结果;
36、计算单元,用于根据目标分割结果计算当前视频帧中第一距离的当前值d1、第二距离的当前值d2和夹角的当前值m;
37、第一判断单元,用于判断是否满足|m-m|/m<k1;
38、设置单元,用于在否的情况下,设置move=true;
39、第二判断单元,用于在是的情况下,判断是否满足d1、d2都存在,且|d1-d1|/d1<k2和|d2-d2|/d2<k2;
40、设置单元,用于在否的情况下,设置move=true;
41、删除单元,用于在是的情况下,当待告警队列a长度=int(t1*60/t3)时,删除队列中最早加入的一个元素;
42、重置单元,用于将move加入到待告警队列a中,重置move=false;
43、第三判断单元,用于判断判断是否队列a中存在百分之k3及以上的数值是true,且距离上一次告警时间≥t2;
44、告警单元,用于在时的情况下,产生告警,返回当前系统时间;在否的情况下,进行下一帧判断。
45、第三方面,本发明提供一种电子设备,包括:存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行以上所述方法的步骤。
46、本发明的有益效果:本发明提供的bsd摄像头偏移预警方法、装置及电子设备,基于bsd摄像头盲区分割结果,结合地面最边缘像素连线和水平方向夹角和地面最边缘像素到画面边缘的距离判断摄像头偏移情况,实现在公交行车场景下,识别bsd摄像头画面的左右偏移和旋转偏移,可通过阈值调整可识别不同程度的偏移;基于bsd算法分割结果,加入业务逻辑实现摄像头偏移判断,不增加额外深度学习模型,效率高;加入车速判断,规避因开门、乘客上下车遮挡车身近端地面引起的误报;结合不同时间点的多帧结果进行告警判断,减少对bsd算法分割结果的依赖,容错能力强。
本文地址:https://www.jishuxx.com/zhuanli/20240822/280579.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表