低过采StaggeredSAR成像方法、设备、介质及产品
- 国知局
- 2024-08-30 14:22:46
本发明涉及遥感成像,特别是涉及一种低过采staggered sar成像方法、设备、介质及产品。
背景技术:
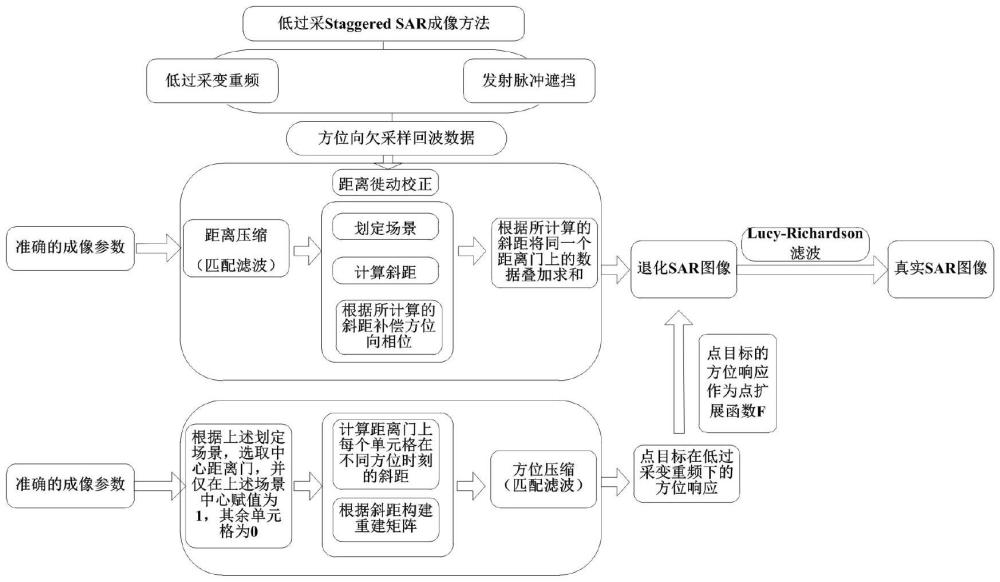
1、staggered sar(staggered synthetic aperture radar)是一种利用变脉冲重复间隔(pulse repetition interval,pri)和接收扫描(scan-on-receive,score)技术实现连续覆盖的宽幅观测工作模式。staggered sar具有同时实现高分辨率和宽测绘带的巨大潜力,且低过采staggered sar可以有效降低星载数据存储量和传输数据量,缓和距离模糊,已被作为tandel-l和nisar的基准模式。但是,由于其回波数据采样的不均匀性和收发冲突导致数据丢失可能引起的欠采样,进而导致在成像过程中方位向出现高旁瓣、方位模糊、虚假目标等问题。现有低过采staggered sar成像方法主要包括频域成像和时域成像方法。频域成像过程中,需要将非均匀采样数据重新采样成均匀采样数据,进一步进行频域处理,但是该过程引入了重采样误差,降低成像质量。时域成像过程中,不需要重采样,但在方位向压缩过程中,多基于压缩感知算法进行聚焦,该算法需要满足场景稀疏先验性,所以该方法具有一定的局限性。
技术实现思路
1、为解决现有技术存在的上述问题,本发明提供了一种低过采staggered sar成像方法、设备、介质及产品。
2、为实现上述目的,本发明提供了如下方案:
3、一种低过采staggered sar成像方法,所述方法包括:
4、获取雷达工作参数;所述雷达工作参数包括:场景中心参考斜距、卫星飞行速度、方位向天线尺寸、发射脉冲数、雷达发射脉冲的时刻向量以及雷达发射脉冲的工作波长;
5、基于雷达工作参数划分观测场景,得到第一场景;
6、基于所述第一场景获得观测场景的退化图像;
7、以所述场景中心参考斜距为中心,以所述第一场景为参考,划分所述观测场景得到第二场景;
8、构造第二场景中心的方位向信号以及所述第二场景的重建矩阵;
9、基于第二场景中心的方位向信号以及所述第二场景的重建矩阵得到退化函数;
10、基于所述退化函数,对所述退化图像的每一列进行lucy-richardson滤波处理,得到观测场景的真实图像。
11、可选地,基于所述第一场景获得观测场景的退化图像,具体包括:
12、获得低过采staggered sar的回波像素点的原始回波信号矩阵;
13、基于所述原始回波信号矩阵获得距离压缩时域回波信号;
14、获取第一场景的场景点坐标以及卫星采样位置坐标,并根据第一场景的场景点坐标和所述卫星采样位置坐标得到第一场景中所有场景点在每个采样时刻的斜距;
15、基于所有场景点在每个采样时刻的斜距确定时延,并在每个方位的采样时刻,根据所述时延和距离压缩时域回波信号获得第一场景中所有场景点的回波时延信号;
16、将每一采样时刻获得的回波时延信号与对应采样时刻的方位向补偿相位叠加,得到方位压缩矩阵;
17、重新划分所述方位压缩矩阵,得到观测场景的退化图像。
18、可选地,基于所述原始回波信号矩阵获得距离压缩时域回波信号,具体包括:
19、对所述原始回波信号矩阵进行距离向傅里叶变换,得到距离频域回波信号;
20、对所述距离频域回波信号进行基于匹配滤波的距离压缩,得到距离压缩频域回波信号;
21、对所述距离压缩频域回波信号进行距离向傅里叶逆变换,得到距离压缩时域回波信号。
22、可选地,对所述原始回波信号矩阵进行距离向傅里叶变换,得到距离频域回波信号,具体包括:
23、提取所述原始回波信号矩阵中的每个行矩阵,将每一行矩阵中前一半元素与后一半元素对换位置,得到新的行矩阵;
24、对新的行矩阵进行快速傅里叶变换,并将快速傅里叶变换后的新的行矩阵的前一半元素与后一半元素对换位置,以完成对所述原始回波信号矩阵进行距离向傅里叶变换的操作,得到距离频域回波信号。
25、可选地,对所述距离频域回波信号进行基于匹配滤波的距离压缩,得到距离压缩频域回波信号,具体包括:
26、在频域中,构造实现距离压缩的匹配滤波器;
27、将所述距离频域回波信号的每行分别与所述匹配滤波器进行逐点相乘,得到二维矩阵;
28、对所述二维矩阵的距离向维度两端进行α倍补零操作,得到补零后矩阵;
29、对补零后矩阵进行距离向傅里叶反变换,得到所述距离压缩频域回波信号。
30、可选地,构造第二场景中心的方位向信号以及所述第二场景的重建矩阵,具体包括:
31、取一个不小于观测场景尺寸的距离门,在该距离门上布设多个场景点,依据第二场景的中心坐标,确定每个场景点的坐标;
32、基于低过采staggered sar的采样时刻以及卫星采样初始位置得到卫星采样位置坐标;
33、根据每个场景点的坐标和卫星采样位置坐标确定同一个距离门上所有场景点在每个采样时刻的斜距;
34、基于同一个距离门上所有场景点在每个采样时刻的斜距以及所述雷达工作参数确定第二场景中心的方位向信号;
35、基于同一个距离门上所有场景点在每个采样时刻的斜距以及所述雷达工作参数构造所述重建矩阵。
36、可选地,基于所述退化函数,对所述退化图像的每一列进行lucy-richardson滤波处理,得到观测场景的真实图像的过程,采用以下公式表示为:
37、
38、式中,i表示迭代次数,表示卷积运算,表示经第i次lucy-richardson滤波获取的观测场景的第q列结果,表示经第i+1次lucy-richardson滤波获取的观测场景的第q列结果,i(q)表示退化图像的第q列,f表示退化函数。
39、一种计算机设备,包括:存储器、处理器以存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述任一项所述的低过采staggeredsar成像方法。
40、一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述任一项所述的低过采staggered sar成像方法。
41、一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任一项所述的低过采staggered sar成像方法。
42、根据本发明提供的具体实施例,本发明公开了以下技术效果:
43、本发明基于雷达工作参数划分观测场景,得到第一场景,基于第一场景获得观测场景的退化图像;以场景中心参考斜距为中心,以第一场景为参考,划分观测场景得到第二场景;构造第二场景中心的方位向信号以及第二场景的重建矩阵;基于第二场景中心的方位向信号以及第二场景的重建矩阵得到退化函数;基于退化函数,对退化图像的每一列进行lucy-richardson滤波处理,得到观测场景的真实图像,以改善成像算法的鲁棒性和普适性,进一步提高成像质量。
本文地址:https://www.jishuxx.com/zhuanli/20240830/281730.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表