一种杂波环境下的雷达目标TWS跟踪方法
- 国知局
- 2024-08-30 14:32:29
本发明属于雷达目标数据处理领域。涉及一种杂波环境下的雷达目标tws跟踪方法。
背景技术:
1、跟踪雷达的数据处理一般可分为目标航迹的起始和跟踪两大功能项。针对已经起始的目标,在杂波环境下实现目标航迹的稳定跟踪是雷达数据处理领域的重要研究方向之一。
2、主动跟踪雷达通过向外辐射电磁波来探测目标。目标回波经过信号处理等环节形成点迹数据作为跟踪雷达数据处理模块的输入数据。理想情况下,凝聚的点迹数据应全部为人们所感兴趣的目标,一般来说指各类飞行器。但实际情况下,受外部环境和雷达硬件条件的影响,雷达回波中还包含接收机噪声、大气噪声及其他非感兴趣目标散射的电磁波如(云、雨、雪、鸟、楼等)。甚至敌方的雷达、干扰机主动释放的干扰。以上因素导致数据处理接收的点迹数据中存在大量非感兴趣目标,即杂波点。雷达航迹在滤波过程中关联到杂波点迹会导致降航迹精度降低和跟踪滤波器发散等问题,严重影响目标的正常跟踪。
3、主动跟踪雷达根据其调度方式可分为边搜索边跟踪tws(track while search)模式和搜索加跟踪tas(track and search)模式。tws相对tas,是一种无反馈的开环跟踪模式。tws模式下,雷达按照其既定工作扫描频点及调度策略工作,不会单独为某批跟踪目标分配额外的时间资源及调整波束指向。这导致tws相对tas而言其更容易受到杂波的影响。
4、针对杂波点,最常见的做法是在信号处理阶段采用动目标显示(moving targetindicator,mti)、动目标检测(moving target detection,mtd)及发射跳频信号实现多重频来尽量减少杂波点的产生。或者采用点迹质量评估的方式对点迹数据进行过滤进而剔除杂波点。但上述方法存在以下问题:1、当目标附近存在较强反射体如高楼、铝箔云等时,由于目标回波较弱在点迹凝聚时无法避免的被强反射体影响,造成凝聚后点迹偏离目标真实位置,采用该点迹滤波后的航迹会偏离正确航路,最终造成目标丢失。2、上述方法均为信号处理级的方法。在某部雷达工作体制、硬件条件、工作模式确定的情况下,受大气波导、干涉盲区等因素的影响无法避免的在某些探测区域产生杂波点。当目标穿越的区域杂波点密度较高时,其航迹依然易被杂波点干扰。
技术实现思路
1、1.所要解决的技术问题:
2、在雷达目标跟踪中,如何减小杂波点的影响。
3、2.技术方案:
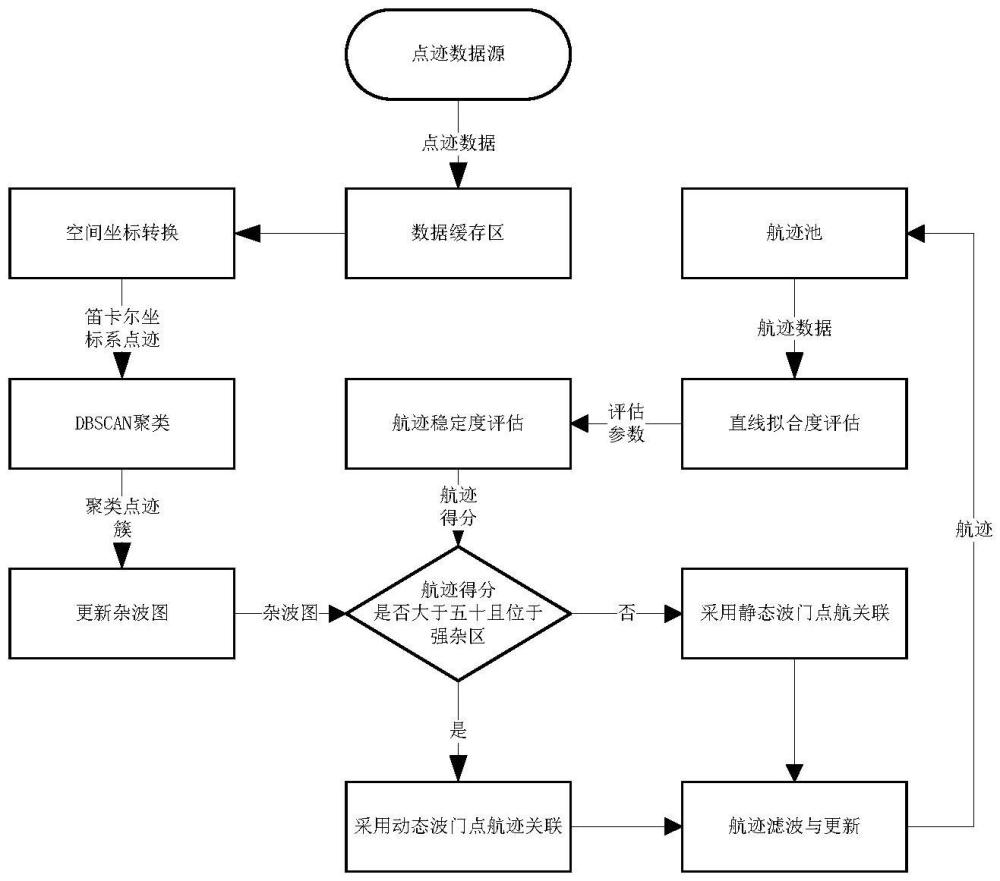
4、为了解决以上问题,本发明提供了一种杂波环境下的雷达目标tws跟踪方法,其特征在于:包括以下步骤:
5、步骤一:获取雷达点迹数据,开辟三维点迹存储空间将多个周期的点迹数据坐标转换后存至本地并统计当前帧中每个空间单元点迹个数作为杂波评价因子。
6、步骤二:对多个周期点迹进行加权滤波,采用四维αβ滤波刷新对应方位的杂波图区域。采用db-scan进行对杂波图z维度进行聚类。根据所得聚类点集及边界点集标注强杂区,完成杂波图更新。
7、步骤三:遍历航迹集中航迹,采用航迹评价函数对航迹跟踪稳定性进行评估。
8、步骤四:当航迹进入杂波图中的强杂区时,根据评价得分计算动态关联波门。根据得分值选择是否采用动态波门。
9、步骤五:航迹滤波与更新后的轨迹传输轨迹池,并对轨迹池内的轨迹数据进行直线拟合度评估,得到航迹稳定度评估并得到轨迹得分,进入到步骤三。
10、步骤一的具体方法为:设雷达扫描周期为t,即每t秒扫描一次全部空域,假设雷达数据的最小方位片为δazi,总方位片个数为nazi=360/δazi,每个方位片扫描回波经过点迹凝聚后为一个数据帧,每个数据帧存在k个距离单元,每个距离单元最多存储m个点迹数据,点迹数据为plot_1,plot_2,...,plot_m,假设采用n次扫描的数据更新杂波图,需要开辟的本地存储空间大小为n*nazi*m*k*sizeof(plot),n取4,在tws跟踪中,接收的数据帧时间间隔相等,且方位序号由小至大顺序到达,在笛卡尔坐标系上建立空间杂波图,设三维分辨网格长度为l,即将空间以雷达为中心延x,y,z轴划分空间为l*l*l的三维网格,l参值为2km,每个数据帧到达时,根据点迹的数据的距离ρ、方位θ、仰角将其转化为笛卡尔坐标,根据点迹的笛卡尔坐标将其存入三维杂波图中对应空间单元,并统计当前帧中每个空间单元点迹个数作为杂波评价因子。
11、步骤二中杂波图更新的具体方法为:采用n维αβ滤波刷新对应方位的杂波图区域,设第k个周期刷新的某方位片数据帧为dk,第k个周期的杂波图滤波结果为fk,设αβ滤波线性权值为w1,w2,...,wn,则三维动态杂波图更新公式如下:
12、fk=w1dk+w2fk-1+...+wnfk-n+1。
13、n值为4,滤波权值的参考值为w1=0.65,w2=0.2,w3=0.1,w4=0.05,滤波完成后,对杂波图的z维度采用db-scan进行聚类,集合
14、z={z(1),z(2),...,z(n)}。
15、其中ε为密度的邻域半径,m为邻域密度阈值,则其邻域为nε(z)={z∈z∣f(x,y,z)<ε}。z的密度为ρ(z)=|n∈(z)|。
16、设聚类后的形成了n个聚类点集,分别为zc1,zc2,..zcn,并记znci=z\zci为其补集,若某网格满足
17、
18、则为该聚类点集的边界点,则边界点集合为
19、zbd1,zbd2,...zbdm。
20、强杂单元的定义为单位空间网格中存在三个及以上点迹,故密度阈值m为3,邻域半径为2km,聚类完成后,根据所得聚类点集及边界点集对杂波图三维空间进行标注,完成动态杂波图。
21、步骤三中,航迹跟踪稳定性评估方法具体为:当航迹集中航迹i刷新时,根雷达扫描间隔t,计算航迹track_i一个扫描周期的外推位置当航迹外推的空间位置为动态杂波图标注的强杂区时,采用航迹评价准则其航迹稳定性,计算其当前滤波航向与上一次滤波航向差记为δcouse,航速差为δv,航迹质量q定义如下:航迹每成功关联,则利用关联点迹滤波且航迹质量加一,每次关联失败时,航迹外推且航迹质量减一,到达最大值后航迹质量不再增加,q最大值为10,计算航迹的直线拟合度,记航迹跟踪次数为ntrack,当航迹跟踪次数大于五次时,取跟踪次数与航迹质量最大值中较小的数,记为npick,取该航迹的npick个历史关联点迹,以当前关联点迹作为点迹终点和所取npick点迹中时间最早的点迹作为点迹起点,并将其坐标从球坐标系转化为笛卡尔坐标系,构建三维直线,遍历剩余npick-2个历史点迹,根据其点迹时间计算其在构建的三维直线上的空间推测位置,将推测位置转化回球坐标系记为(azipi,dispi,elvpi),计算剩余关联点迹真实位置的方位、距离、仰角与推测位置的方位差、距离差、仰角差的平方和并开根号除以点迹数,公式如下:
22、
23、
24、
25、采用航迹稳定性评价函数计算航迹稳定性得分,航迹质量航迹稳定性评价函数如下:
26、
27、其中p_q=5q为航迹质量得分。
28、p_ntrack=2*min(ntrack,10)为跟踪次数得分。
29、为角度拟合度得分。
30、为距离拟合度得分。
31、为仰角拟合度得分。
32、为速度相似度得分。
33、为航向相似度得分。航迹稳定性得分为track_point。
34、步骤四中,目标穿强杂波区波门选择方法具体为:选择点迹航迹关联波门,当航迹稳定性大于等于50时采用动态波门,航迹动态波门计算公式如下:
35、
36、当采用动态波门进行点航关联时,根据动态杂波图判断航迹外推位置是否处于强杂区,若处于强杂区,且波门内成功关联到点迹则航迹正常更新滤波,若关联不到点迹,则直接进行航迹外推,当航迹稳定性小于50时采用静态波门,航迹静态波门分为大、中、小三种波门,大波门空间半径为2km,中波门空间半径为1km,小波门空间半径为500m,
37、当采用静态波门进行点航关联时,首先遍历当前数据帧中点迹,计算点迹位置与航迹外推位置的空间直线距离,并进行排序,取距离最小值与波门进行比较若小于波门则关联成功,如果在小波门无法关联到点迹则自动扩大波门至中波门,同样,中波门内关联不到目标点则扩大波门至大波门,若大、中、小波门均关联不到点迹则进行航迹外推。
38、3.有益效果:
39、本发明有效评估探测空间中的杂波密度水平,对稳定跟踪航迹采用关联范围相对较小的动态波门可以有效解决雷达tws跟踪时航迹穿越杂波区时被杂波点带偏的问题,显著提高动目标在强杂波环境下的跟踪稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240830/282585.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表