一种基于不匹配界面结点对接的动态子结构法
- 国知局
- 2024-08-30 15:04:25
本发明涉及结构动力学分析,具体涉及一种基于不匹配界面结点对接的动态子结构法,尤其涉及一种后掠翼飞行器基于不匹配界面结点对接的动态子结构法。
背景技术:
1、结构动力学分析中的有限元方法将连续系统的动力学问题转化为多自由度系统的动力学问题。
2、随着现代工程技术的发展,后掠翼飞行器的结构越来越庞大、复杂,在分析计算庞大复杂结构的动力学特性和动力学响应时,用有限元方法离散得到的系统,其自由度往往是成千上万阶,甚至几十万阶,无法使用现有的计算方法进行分析。
3、动态子结构方法在建立大型复杂结构系统的力学模型时,可以从量级上大幅度缩减整体自由度而不改变问题的本质:它把大型复杂结构划分为若干个子结构,首先分析研究每个子结构的动力特性,并保留其低阶主要模态信息,然后再根据各子结构界面的协调关系,组装成整体结构的动力学模型。
4、使用动态子结构方法,可以在保证满足精度要求的前提下,通过对整体模型进行降阶,提高计算效率,使大型复杂结构整体动力特性问题得以求解。然而,现有的动态子结构法都默认子结构的界面结点是重合的,而无法处理不匹配界面结点对接。要求界面结点匹配意味着对结构有限元建模提出了更高的要求,在复杂工程问题中适用性不好。
技术实现思路
1、鉴于上述问题,本发明提供了一种基于不匹配界面结点对接的动态子结构法,通过多维样条插值实现不匹配结点之间的位移和力的传递,构建位移协调条件和力协调条件,使动态子结构法得以适用于子结构界面结点不匹配的情况。
2、本发明提供了一种基于不匹配界面结点对接的动态子结构法,具体提供了一种后掠翼飞行器基于不匹配界面结点对接的动态子结构法,包括:
3、步骤1、获得后掠翼飞行器的多个子结构,确定多个子结构之间的界面结点;
4、可以理解的是,所述多个子结构之间连接的结点称为界面结点,其余为内部结点;所述界面结点对应的自由度为界面自由度;所述界面结点对应的自由度称为内部自由度;
5、步骤2、基于所述多个子结构之间的界面结点,分别对所述每个子结构进行模态分析得到对应的低阶自由界面模态;
6、获取所述每个子结构的剩余模态,基于所述每个子结构对应的低阶自由界面模态和剩余模态得到多个对应的子结构模态动力学方程;
7、优选的,所述对应的子结构模态动力学方程表达式为:
8、
9、其中,ik为子结构k的单位矩阵,mk为子结构k的剩余模态对应的质量阵,为子结构k的剩余模态对应的广义坐标,为子结构k的剩余模态对应的广义坐标,λk为子结构k的固有频率的平方组成的对角阵,kk为子结构k的剩余模态对应刚度阵,pk为子结构k的低阶自由界面模态对应的广义坐标,fk为子结构k的界面结点对应的载荷列向量,即子结构剩余模态对应的广义坐标,φk为子结构k的低阶自由界面模态,ψk为子结构k的剩余模态,bk为子结构k的提取矩阵,用于将子结构界面结点上的力转换为所有结点上的力。
10、优选的,步骤2所述得到对应的子结构模态动力学方程的具体步骤包括:
11、步骤21、设子结构的自由度数为n,得到n阶模态,建立子结构k的n阶模态φk,a,取子结构k的n阶模态中前a阶模态组成低阶自由界面模态,得到子结构k的低阶自由界面模态φa,k;其中,a<<n;
12、步骤22、所述子结构k低阶自由界面模态φa,k基于界面力作用下的静平衡关系,得到子结构k的剩余界面模态求解方程;基于所述子结构k的剩余界面模态求解方程得到子结构k剩余界面模态;
13、步骤23、基于子结构k的低阶自由界面模态φa,k和剩余界面模态得到对应的子结构k的模态动力学方程;
14、步骤24、遍历多个子结构,重复步骤21-23得到多个子结构模态动力学方程。
15、进一步的,得到所述子结构k的剩余界面模态具体步骤包括:
16、判断子结构k的n阶模态φn,k有无刚体模态,若子结构k的n阶模态φn,k没有刚体模态,则得到没有刚体模态的子结构k的界面模态φn,k′;
17、得到所述没有刚体模态的子结构界面模态位移un,k′;
18、取没有刚体模态的子结构k的n阶模态中前a阶模态组成低阶自由界面模态,得到没有刚体模态的子结构k低阶自由界面模态φa,k′;其中,a<<n;
19、基于所述没有刚体模态的子结构k的低阶自由界面模态φa,k′和所述没有刚体模态的子结构界面模态位移un,k′,得到没有刚体模态的子结构低阶自由界面模态位移ua,k′,表达式为:
20、ua,k′=φa,k′pa,k′=φa,k′λa,k-1′φa,k′bk′tfk′
21、其中,φk,a′为没有刚体模态的子结构k的低阶自由界面模态,pk,a′为没有刚体模态的子结构k的低阶自由界面模态的广义坐标,ak,a′为没有刚体模态的子结构k的低阶自由界面模态的固有频率的平方组成的对角阵,bk′为没有刚体模态的子结构k的提取矩阵,用于将子结构界面结点上的力转换为所有结点上的力,fk′为没有刚体模态的子结构k的界面结点对应的载荷列向量,即子结构k的剩余模态对应的广义坐标。
22、基于所述没有刚体模态的子结构低阶自由界面模态位移ua,k′得到没有刚体模态的子结构k的剩余模态ψd,k′,表达式为:
23、ψd,k′=(φn,k′λn,k-1′φn,k′t-φa,k′λa,k-1′φa,k′t)bkt′
24、=(ka,k-1′-φa,k′λa,k-1′φa,k′t)bkt′
25、其中,φn,k′为没有刚体模态的子结构k界面模态,λn,k′为没有刚体模态的子结构k的界面模态的固有频率的平方组成的对角阵,ka,k′为没有刚体模态的子结构k的低阶自由界面模态的刚度矩阵。
26、若子结构k有刚体模态,得到有刚体模态的子结构k的界面模态φr,k;
27、得到有刚体模态的子结构k的界面模态位移uk;所述有刚体模态的子结构k的界面模态位移uk包括刚体模态位移和弹性变形位移;
28、基于所述有刚体模态的子结构k的界面模态位移uk得到所述有刚体模态的子结构k的刚体运动加速度;
29、基于有刚体模态的子结构k的刚体运动加速度生成惯性力,基于所述惯性力得到有刚体模态的子结构k的静平衡方程;
30、建立子结构k的刚体模态约束;
31、依据所述有刚体模态的子结构k的静平衡方程和子结构k刚体模态约束得到子结构k刚体模态位移ur,k;
32、ur,k=φr,kpr,k=φr,k(φr,ktmkφr,k)-1φr,ktmkuk
33、其中,pr,k为有刚体模态的子结构k低界面模态的广义坐标;
34、基于所述子结构k的刚体模态位移ur,k得到子结构k的弹性变形位移ue,k;
35、使用子结构k的低阶自由界面模态对所述有刚体模态的子结构k的静平衡方程进行降阶,再进行坐标变换,得到有刚体模态的子结构k的低阶自由界面模态的弹性变形位移求解方程;
36、基于所述有刚体模态的子结构k弹性变形位移求解方程,得到有刚体模态的子结构k低阶自由界面模态的弹性变形位移ue,a,k,表达式为:
37、ue,a,k=φx,a,kpe,a,k
38、其中,φe,k,a为有刚体模态的子结构k的低阶自由界面模态,pe,k,a有刚体模态的子结构k的低阶自由界面模态的广义坐标;
39、基于所述有刚体模态的子结构k的低阶自由界面模态的弹性变形位移ue,k,a得到有刚体模态的子结构k的剩余模态。
40、步骤3、获得后掠翼飞行器的多个子结构之间的不匹配界面结点及其对应的坐标,根据所述对应的坐标生成插值矩阵,利用所述插值矩阵得到子结构插值界面结点位移和插值界面结点受力位移;
41、本发明一个实施例中,步骤3所述得到子结构插值界面结点位移和插值界面结点受力位移的具体步骤包括:
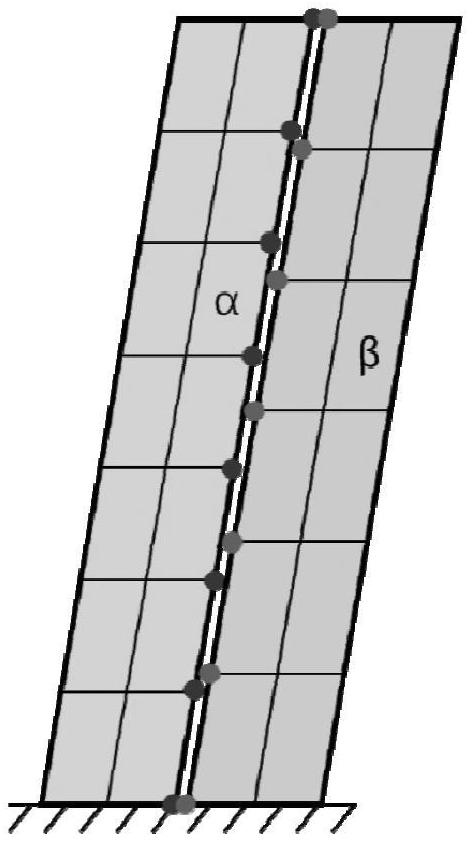
42、以两个子结构为例,
43、获得后掠翼飞行器的子结构k的界面结点;
44、获得子结构β的界面结点;基于所述后掠翼飞行器的子结构k和子结构β的界面结点得到子结构k和子结构β对应的不匹配界面结点;
45、获得子结构k的不匹配界面结点的坐标和位移;获得子结构β的不匹配界面结点的坐标和位移;
46、建立位移插值函数;
47、将所述子结构k的不匹配界面结点对应的坐标和位移代入所述位移插值函数,得到位移插值系数;
48、基于所述子结构β的不匹配界面结点对应的坐标、位移以及所述位移插值系数,得到子结构插值界面结点位移;
49、获取子结构k的界面结点受力fk,j;
50、通过所述子结构插值界面结点位移和所述子结构k的界面结点受力fk,j获得插值界面结点受力位移fβ,j。
51、步骤4、基于步骤2所述多个子结构模态动力学方程建立初始后掠翼飞机动力学模型;
52、获得多个子结构的界面结点连接关系;
53、基于所述多个子结构的界面结点连接关系,利用步骤3所述插值界面结点位移和插值界面结点受力位移得到双协调条件;
54、获得所述双协调条件的自由度;
55、通过所述双协调条件的自由度得到子结构模态转换矩阵;
56、将所述子结构模态转换矩阵代入初始后掠翼飞机动力学模型,得到后掠翼飞机动力学方程;
57、优选的,所述初始后掠翼飞机动力学模型,表达式为:
58、
59、其中,为子结构k的剩余模态对应的质量阵;为子结构β的剩余模态对应的质量阵;为子结构k的剩余模态对应的广义坐标;为子结构β的剩余模态对应的广义坐标;为子结构k的剩余模态对应的刚度阵;子结构β的剩余模态对应的刚度阵;pk为子结构k的低阶自由界面模态对应的广义坐标;pβ为子结构β的低阶自由界面模态对应的广义坐标;φk为子结构k的低阶自由界面模态;φβ为子结构β的低阶自由界面模态,ψk为子结构k的剩余模态,ψβ为子结构β的剩余模态,fk为子结构k的界面结点对应的载荷列向量;fβ为子结构β的界面结点对应的载荷列向量;bk为子结构k的提取矩阵;bβ为子结构β的提取矩阵。
60、在本发明一个实施例中,获得后掠翼飞机动力学方程具体步骤包括:
61、基于步骤2所述多个子结构模态动力学方程建立初始后掠翼飞机动力学模型;
62、获得多个子结构的界面结点连接关系;
63、若多个子结构的界面结点连接关系为刚性连接,则利用插值界面结点位移和插值界面结点受力位移得到第一双协调条件;所述第一双协调条件为刚性连接双协调条件;
64、获得第一双协调条件的自由度,基于所述第一双协调条件的自由度构建刚性模态转换矩阵;
65、将所述刚性模态转换矩阵代入所述初始后掠翼飞机动力学模型得到后掠翼飞机动力学方程一;
66、若多个子结构的界面结点连接关系为弹性连接,则利用插值界面结点位移和插值界面结点受力位移得到第二双协调条件;所述第二双协调条件为弹性连接双协调条件;
67、获得第二双协调条件的自由度,基于所述第二双协调条件的自由度构建弹性模态转换矩阵;
68、将所述弹性模态转换矩阵代入所述初始后掠翼飞机动力学模型得到独立广义坐标下的后掠翼飞机动力学方程二;
69、若多个子结构的界面结点没有连接关系,也即多个子结构界面结点不匹配时,利用插值界面结点位移和插值界面结点受力位移得到第三双协调条件;所述第三双协调条件为界面结点不匹配双协调条件;
70、获得第三双协调条件的自由度,基于所述第三双协调条件的自由度构建界面结点不匹配模态转换矩阵;
71、将所述界面结点不匹配模态转换矩阵代入所述初始后掠翼飞机动力学模型得到后掠翼飞机动力学方程三。
72、与现有技术相比,本发明至少具有现如下有益效果:
73、本发明的动态子结构方法有效解决了飞行器子结构间不匹配界面结点的对接问题,扩大了动态子结构法的适用范围,在复杂工程问题中有更好的适用性。
本文地址:https://www.jishuxx.com/zhuanli/20240830/285378.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。