基于几何先验信息的航空多天线通信系统信道跟踪方法
- 国知局
- 2024-08-30 15:06:15
本发明涉及无线通信,尤其涉及基于几何先验信息的航空多天线通信系统信道跟踪方法。
背景技术:
1、航空通信系统是保障航空运输安全高效运行的关键基础设施,航空器在巡航阶段飞行高度超过8000米,长距离信号传输导致严重的路径损耗。考虑到多天线可以提供较大的阵列增益,使用多天线技术可以产生指向性波束,用以弥补路径损耗造成的低信噪比。然而,充分利用多天线技术的前提是获取准确的信道状态信息。由于航空器位置快速变化和姿态灵活调整,使得地空高维信道快速变化,极大地增加了基站侧信道状态信息实时获取的难度。因此,需要解决地空信道状态信息实时获取的难题。
2、现有工作主要研究地面时变条件下的信道状态信息获取,没有同时考虑地空信道的稀疏多径特性以及航空器姿态的灵活变化特性,地面信道获取方案并不适合航空器高动态的通信场景。具体表现为:一方面,现有的信道跟踪方法没有考虑到航空器姿态对地空信道产生的影响,航空器姿态的灵活调整可能导致空域信道角度增益发生突变。另一方面,现有的信道跟踪方法没有有效使用航空通信场景中航空器飞行轨迹等先验信息,同时没有充分利用航空通信信道的稀疏多径特性。因此,现有的地面无线通信信道跟踪方案无法直接应用在航空通信场景中。
3、为了解决上述问题,本发明提出了基于几何先验信息的航空多天线通信系统信道跟踪方法,有效应对航空器姿态灵活调整对信道跟踪的影响。
技术实现思路
1、本发明的目的是提供基于几何先验信息的航空多天线通信系统信道跟踪方法,利用少量导频跟踪地空信道状态信息,根据航空器位置和姿态的预测结果以及反射体位置构建地空信道角度先验信息,估计地空信道低维多径增益参数,以重构高维信道矩阵,有效应对航空器姿态灵活调整对信道跟踪的影响,以低导频开销的方式实现了高维信道跟踪。
2、为实现上述目的,本发明提供了基于几何先验信息的航空多天线通信系统信道跟踪方法,包括以下步骤:
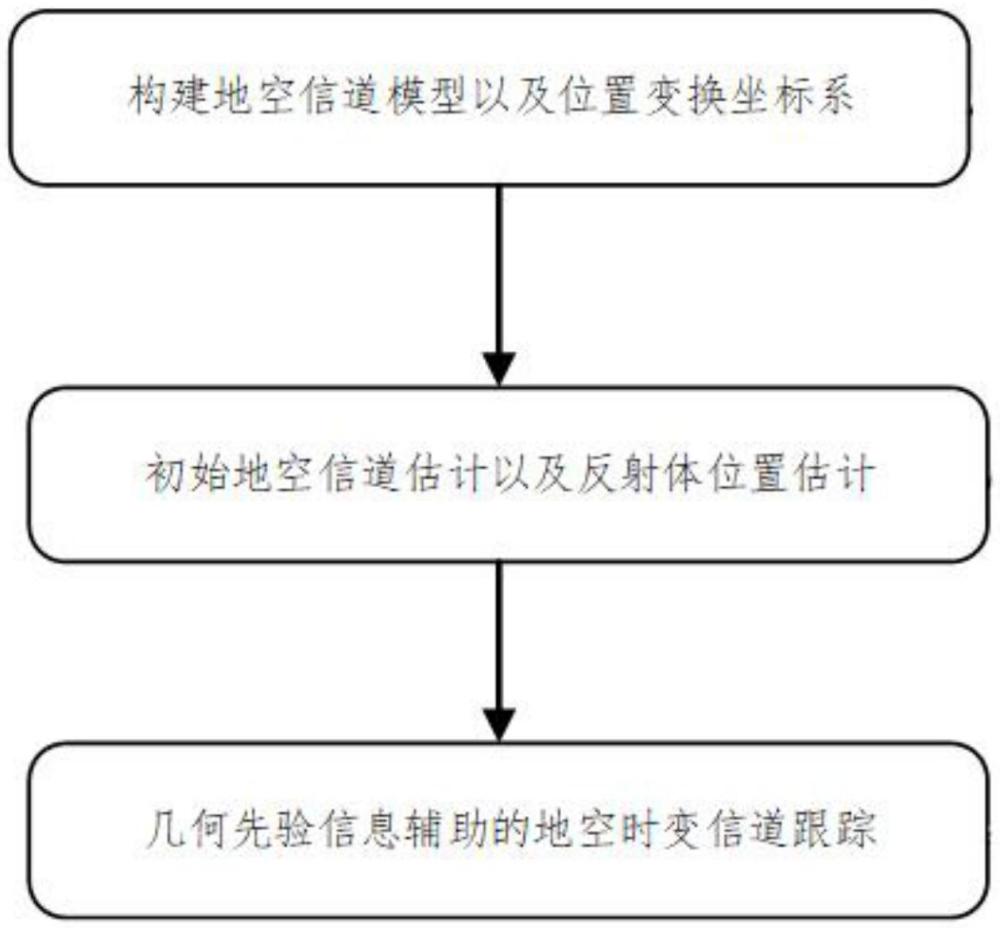
3、s1、构建地空信道模型以及位置变换坐标系,如下所示:
4、s11、构建地空mimo-ofdm信道模型,利用航空器位置和姿态描述信道的导向矢量;
5、s12、构建用于位置变换的参考坐标系,利用表征航空器姿态的欧拉角序列建立旋转矩阵;
6、s13、根据位姿一体转换公式推导在姿态影响下航空器侧的导向矢量;
7、s2、初始地空信道估计以及反射体位置估计,如下所示:
8、s21、在初始信道估计阶段,利用初始高维信道估计结果计算航空器位置、姿态以及地空通信系统散射体位置;
9、s22、在信道跟踪阶段,使用多项式回归对航空器位置进行预测,使用四元数法表示航空器姿态,计算航空器旋转角速度并对姿态进行预测;
10、s3、几何先验信息辅助的地空时变信道跟踪,如下所示:
11、s31、根据预测的空间信息推算地空信道的角度信息,即用于信道跟踪的几何先验信息;
12、s32、根据步骤s1中利用欧拉角旋转序列来描述航空器的姿态,采用四元数表示法重新表示航空器姿态并进行姿态预测;
13、s33、将高维信道估计问题转化为低维多径参数估计问题,降低导频开销。
14、优选的,在步骤s11构建地空mimo-ofdm信道模型中,使用一个los路径和l个nlos路径组成地空信道模型,设信道状态信息在连续时隙组成的一个时间块内保持不变,则第t个时间块中第x个子载波上的空频域地空信道矩阵如下所示:
15、
16、其中,ρr是莱斯因子,即los径与nlos径间的功率比;是基站端的导向矢量,是航空器端的导向矢量;是信道到达角aoa中的方位角,是信道aoa中的俯仰角;是信道离开角aod中的方位角,是信道aod中的俯仰角;表示los径的复增益,表示nlos径的复增益,如下所示:
17、
18、其中,和分别是第t个时间块第l条径的大尺度衰落和延时。
19、优选的,在步骤s12构建用于位置变换的参考坐标系中,建立地面站地理坐标系、航空器地理坐标系、航空器机体坐标系和航空器天线坐标系;
20、在第t个时间块,航空器在地面站地理坐标系下的位置,如下所示:
21、
22、在航空器机体坐标系下航空器的姿态通常由欧拉角旋转序列来描述,即航向角α、俯仰角β和滚转角γ旋转序列,则航空器的姿态,如下所示:
23、et=(αt,βt,γt)
24、因此,从航空器地理坐标系到航空器机体坐标系的坐标变换矩阵,如下所示:
25、
26、其中,α为航向角,β为俯仰角,γ为滚转角。
27、优选的,在步骤s13中,位姿一体转换公式,定义如下:
28、
29、给定laod,航空器侧los径导向矢量矩阵,如下所示:
30、
31、其中,
32、
33、
34、
35、
36、式中,和分别表示在天线间隔为d、载波频率λc的情况下沿坐标轴xu、yu方向的空间频率;和分别表示沿坐标轴xu、yu方向的导向矢量。
37、优选的,在步骤s21初始信道估计阶段中,航空器在第q个时隙全向发送第i个ofdm符号到地面站,地面站在第x个子载波上的接收信号如下所示:
38、
39、其中,是航空器侧全向预编码矩阵,是在第x个子载波上的发送信号,是加性高斯白噪声,在地面站侧,是地面站模拟合并矩阵。
40、优选的,在步骤s22信道跟踪阶段中,首先,利用位置转换关系,计算在反射体处的方位角和俯仰角:
41、
42、
43、然后,起点为航空器的实际位置方向为的直线,如下所示:
44、
45、其中,
46、
47、最后,反射体位置被下述方程组所确定:
48、alpl=bl
49、其中,
50、优选的,在步骤s31中,采用多项式拟合对航空器飞行轨迹进行拟合,预测航空器位置,如下所示:
51、
52、其中,表示f(xp)关于xp的一阶导数,t是时间块间隔,v是航空器的速度,||v||可以根据高维地空信道估计阶段中提取到的多普勒频移和laoa计算。
53、优选的,在步骤s32中,采用四元数参数表示航空器姿态,如下所示:
54、
55、其中,ib、jb、kb分别表示xb、yb、zb轴上的单位向量;
56、预测得到的航空器实际位置被转换为如下所示:
57、
58、根据反射体位置以及预测得到的转换后位置下一时刻nlos径的如下所示:
59、
60、
61、优选的,在步骤s33中,结合几何先验信息,估计低维信道参数时,在第q个时隙,第i个ofdm符号的第x个子载波上的接收信号,如下所示:
62、
63、其中,即
64、
65、重构信道快速预测阶段的导频开销,如下所示:
66、
67、基于重构信道快速预测阶段预测以及估计出的参数r∈{t+1,...,t+
68、u}},获得重构高维信道矩阵
69、因此,本发明采用上述基于几何先验信息的航空多天线通信系统信道跟踪方法,其有益效果如下:
70、(1)考虑到航空器姿态的灵活调整,建立参考坐标系并提出位姿一体转换公式,用以描述航空器姿态和位置等空间状态信息与地空信息角度信息之间的关系;
71、(2)考虑到航空器飞行轨迹的规律性,在信道跟踪阶段首先对航空器的位置和姿态等空间状态信息进行预测进而推算地空高维信道中的角度信息;
72、(3)考虑到地空信道稀疏多径特性,在信道跟踪阶段通过将高维信道估计转化为低维稀疏多径参数估计,以低导频开销的方式实现了高维信道跟踪。
73、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
本文地址:https://www.jishuxx.com/zhuanli/20240830/285499.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表