基于感知能力的坐底式海洋结构物防海水冲刷结构与方法与流程
- 国知局
- 2024-09-05 14:34:53
本发明涉及坐底式海洋结构物,尤其是一种基于感知能力的坐底式海洋结构物防海水冲刷结构与方法。
背景技术:
1、坐底式海洋结构物一般由沉入海底的下浮体和支撑上层建筑的立柱以及上层建筑组成。当坐底式海洋结构物到达指定布放海域时,通过压载水系统,调整自身重量,逐渐下沉,直至坐底并完成布放。
2、在海洋动力环境中,坐底结构物底部桩体的局部冲刷问题严重威胁着海洋结构物的稳定与安全。桩体结构的存在阻碍并改变了原有的流场条件,水流不断冲击桩体表面,形成桩前下降水流、桩侧马蹄涡和后方尾涡。当海床表面土体无法抵抗水流作用在其上的切应力和吸应力时,土体颗粒将会被带起处于悬浮状态,而桩侧流线收缩和桩后尾涡的不断发生将土体颗粒快速带走。时间久了,结构物底部就会失去土体颗粒,严重的话影响结构物安全,可能导致结构物失稳倾斜,甚至倾覆造成不可估量的后果。
3、现有技术中的坐底式海洋结构物一般没有较好的办法处理底部海水冲刷,往往在设计时考虑桩底部设置底垫,它的作用是增加海底对桩腿的反力,防止由于海底局部冲刷而造成的平台倾斜。但是在海况较差的海域,高大的底垫成为海底上一个挡流、挡浪的障碍物,破坏了原来稳定的浅海流场和波浪场,产生紊流、旋流。底垫的存在还有可能导致扎不进泥土中,引起平台倾斜,更为严重的影响平台运行安全。
4、如何在保障平台自身安全的前提下,解决坐底式结构物坐底后的海水冲刷,是坐底式结构物设计制造以及运输安装时需要重点解决的工程问题。
技术实现思路
1、本申请人针对上述现有生产技术中的缺点,提供一种基于感知能力的坐底式海洋结构物防海水冲刷结构与方法,从而用于解决结构物坐底之后,由于海底涌浪作用力下,海水冲刷问题,保障结构物安全运行。
2、本发明所采用的技术方案如下:
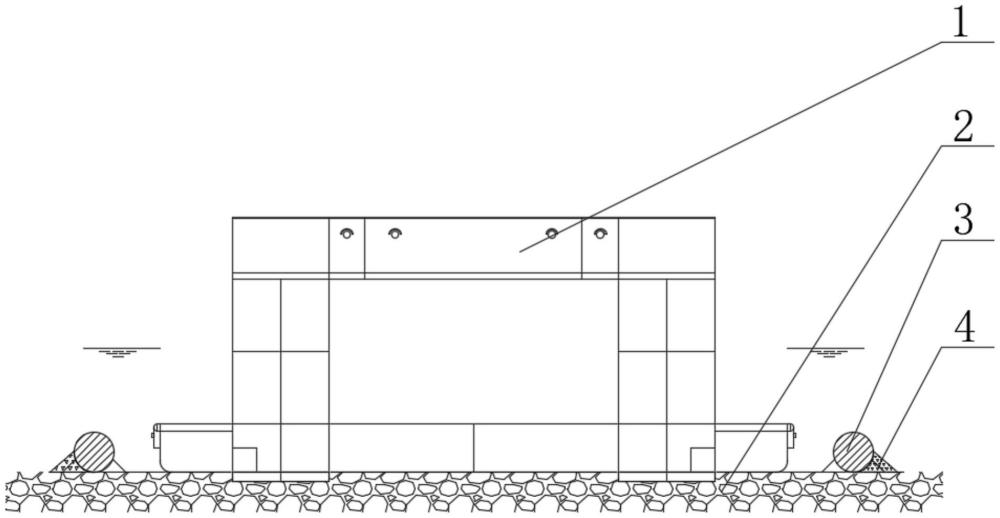
3、一种基于感知能力的坐底式海洋结构物防海水冲刷结构,包括固定在海底的坐底式结构物,所述坐底式结构物的外圈四个面分别设置有气囊,每个气囊的底部设置有安装座,安装座通过紧固件与海底预设的水泥浇筑块连接;气囊的外圈分布有多个涌向传感器,每个气囊通过管系与坐底式结构物内部的压缩空气源连接,同时每个气囊还通过电缆与坐底式结构物内部控制中心连接,每个涌向传感器通过电缆与坐底式结构物内控制中心连接,将感知的涌向即时传输至控制中心,供控制中心判断分析。
4、作为上述技术方案的进一步改进:
5、坐底式结构物的前、后、左、右分别布置四个气囊。
6、涌向传感器共布置有八个。
7、每个气囊的一旁形成有淤泥沉积物。
8、坐底式结构物与气囊之间围成内部海底,淤泥沉积物的外部为外部海底。
9、一种基于感知能力的坐底式海洋结构物防海水冲刷的方法,包括如下操作步骤:
10、第一步:坐底式结构物的布放、传感器的布放;
11、将坐底式结构物进行布设安装,下浮体在海底坐实之后,在平台周围海底布设一圈充气气囊组合,并按照顺时针方向,将充气气囊分别命名,将坐底式结构物前方的气囊按照顺时针方向分别定义为a1、a2、a3、a4;将坐底式结构物右方的气囊按照顺时针方向分别定义为b1、b2、b3、b4;将坐底式结构物后方的气囊按照顺时针方向分别定义为c1、c2、c3、c4;将坐底式结构物左方的气囊按照顺时针方向分别定义为d1、d2、d3、d4;
12、坐底式结构物的外圈布置有一圈八个传感器,同时,八个传感器均在气囊的外围,分别为:在前方正中间布置s1传感器、在前方右方角落布置s2传感器、在右方正中间布置s3传感器、在右方后方角落布置s4传感器、在后方正中间布置s5传感器、在后方左方角落布置s6传感器、在左方正中间布置s7传感器、在左方前方角落布置s8传感器;
13、第二步:海底任一角度涌向结构物冲击;
14、等坐底式结构物、气囊和传感器布设完成后,启动工作,开始进行防海水冲刷;
15、当海底涌以一定角度向本系统冲击时,由于布设在海底的传感器布设在结构物外侧,最先感知到涌向极其变化。传感器组合感知涌向后,将感知到的涌向角与感知时间组合t((θ1,t1)(θ2,t2)(θ3,t3)(θ4,t4)(θ5,t5)(θ6,t6)(θ7,t7)(θ8,t8))传输至控制中心;
16、控制中心收到组合t之后,将输据进行分析,找出实际涌向角,考虑到传感器感知传输,有五个传感器感知涌向角度一样,即为实际涌向,将该实际涌向定义为θ,将θ为切线,做出多个涌向线,按照从上到下的顺序依次通过四个控制点k1、k2、k3、k4,最先通过的控制点的涌向线和最后通过的控制点涌向线组成控制线;
17、两根控制线之间的区域为控制区域,控制线穿过坐底式结构物外部的气囊,穿过从涌向来流方向的气囊为控制气囊;
18、控制中心控制这些气囊充气膨胀,形成一道气囊墙,布置在涌和结构物之间,减缓涌对结构物海底的冲击,降低海水冲刷,保护结构物底部海底构造完整和安全;
19、第三步:涌向变化,结构物受冲击;
20、当海底涌从一定角度转向另外一个角度进行冲击时,由于布设在海底的传感器布设在结构物外侧,最先感知到涌向变化,传感器组合感知涌向变化后,将感知到的新涌向角与感知时间组合
21、t′((θ1,t1)(θ2,t2)(θ3,t3)(θ4,t4)(θ5,t5)(θ6,t6)(θ7,t7)(θ8,t8))传输至控制中心;
22、控制中心收到组合t′之后,将输据进行分析,找出实际涌向角,从感知时间上逻辑判断涌角转向,考虑到传感器感知传输,有五个传感器感知涌向角度一样,且与逻辑判断的涌角转向一致,则判定该涌向角度即为实际涌向,将该实际涌向定义为θ′,以θ′为切线,做出多个涌向线,按照从上到下的顺序依次通过四个控制点k1、k2、k3、k4,最先通过的控制点的涌向线和最后通过的控制点涌向线组成控制线;
23、两根控制线之间的区域为控制区域,控制线穿过结构物外部的气囊,穿过从涌向来流方向的气囊为控制气囊;
24、控制中心控制这些气囊充气膨胀,形成一道气囊墙,布置在涌和结构物之间,减缓涌对结构物海底的冲击,降低海水冲刷,保护结构物底部海底构造完整和安全。
25、本发明的有益效果如下:
26、本发明结构紧凑、合理,操作方便,通过重新布置坐底式结构物的防海水冲刷的结构形式,以及利用新的结构形式所得到的防海水冲刷的方法,可以有效的保障坐底式结构物的安全运行工作,全过程可以自动感知控制,并可及时根据感知结果调整防护措施,高效可靠。
27、本发明对海底结构友好,不需要高大的底垫,有效保护原始生态。
28、本发明可以根据涌向自动变化,有针对性的进行防护。
29、本发明简单明了,可扩展能力强,有利于大面积推广应用。
30、本发明在坐底式海洋结构物布放安装之后,可以有效的防止海水冲刷,并保证平台长时间坐底之后的安全。
技术特征:1.一种基于感知能力的坐底式海洋结构物防海水冲刷结构,其特征在于:包括固定在海底的坐底式结构物(1),所述坐底式结构物(1)的外圈四个面分别设置有气囊(3),每个气囊(3)的底部设置有安装座,安装座通过紧固件与海底预设的水泥浇筑块连接;气囊(3)的外圈分布有多个涌向传感器,每个气囊(3)通过管系与坐底式结构物(1)内部的压缩空气源连接,同时每个气囊(3)还通过电缆与坐底式结构物(1)内部控制中心连接,每个涌向传感器通过电缆与坐底式结构物(1)内控制中心连接,将感知的涌向即时传输至控制中心,供控制中心判断分析。
2.如权利要求1所述的基于感知能力的坐底式海洋结构物防海水冲刷结构,其特征在于:坐底式结构物(1)的前、后、左、右分别布置四个气囊(3)。
3.如权利要求1所述的基于感知能力的坐底式海洋结构物防海水冲刷结构,其特征在于:涌向传感器共布置有八个。
4.如权利要求1所述的基于感知能力的坐底式海洋结构物防海水冲刷结构,其特征在于:每个气囊(3)的一旁形成有淤泥沉积物(4)。
5.如权利要求4所述的基于感知能力的坐底式海洋结构物防海水冲刷结构,其特征在于:坐底式结构物(1)与气囊(3)之间围成内部海底(5),淤泥沉积物(4)的外部为外部海底(2)。
6.一种如权利要求1所述的基于感知能力的坐底式海洋结构物防海水冲刷的方法,其特征在于:包括如下操作步骤:
技术总结本发明涉及基于感知能力的坐底式海洋结构物防海水冲刷结构与方法,包括固定在海底的坐底式结构物,所述坐底式结构物的外圈四个面分别设置有气囊,每个气囊的底部设置有安装座,安装座通过紧固件与海底预设的水泥浇筑块连接;气囊的外圈分布有多个涌向传感器,每个气囊通过管系与坐底式结构物内部的压缩空气源连接,同时每个气囊还通过电缆与坐底式结构物内部控制中心连接,每个涌向传感器通过电缆与坐底式结构物内控制中心连接,将感知的涌向即时传输至控制中心,供控制中心判断分析,用于解决结构物坐底之后,由于海底涌浪作用力下,海水冲刷问题,保障结构物安全运行。技术研发人员:张辉,汤明刚,张欣玉,王子渊受保护的技术使用者:中国船舶科学研究中心技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/287078.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。