一种车载智能激光清障仪及清障方法与流程
- 国知局
- 2024-09-05 14:47:53
本技术涉及激光清障,尤其涉及一种车载智能激光清障仪及清障方法。
背景技术:
1、架空线路主要指架空明线,架设在地面之上,是用绝缘子将输电导线固定在直立于地面的杆塔上以传输电能的输电线路,因架空线路直接裸露在空气中,风筝、塑料布、塑料袋、风筝线等漂浮物容易吹落到架空线上,一旦此类漂浮性的异物受雨、雪、露浸湿,极易造成金属导线相间短路、单相接地等故障,从而导致输配电线路的跳闸或线路损毁,甚至垂落到人畜可接触位置的异物,则有可能造成人畜伤亡,因此,及时清理输电线路上的异物对于供电安全十分重要,但由于安装地面异形、架空线远离地面等限制,给清除异物带来很大的困难,传统的清障方法是工人们通过攀爬杆塔在架空线上安装爬行装置,爬行装置在架空线上移动清除异物,但由于攀爬危险性较大、作业时间长、操作复杂、成本高、效果不佳等诸多缺陷,所以这种清障方法在慢慢被淘汰。
2、针对上述人工清障的缺陷,取而待之的是采用激光器进行清障,工作人员只需在地面上开启和移动激光器,把激光对准架空线上的障碍物,待等到足够长时间障碍物就会燃烧或气化,从而消除障碍物,操作非常简单快捷。
3、但现有的激光清障仪在使用时,需要通过人眼判断障碍物并进行瞄准,人眼不方便长时间观看,存在较大偏差,而且人工移动激光器对准障碍物困难,定位不精准,且人工劳动强度大。
技术实现思路
1、本技术提供了一种车载智能激光清障仪及清障方法,解决了现有激光清障仪在使用时需要人眼瞄准障碍物并通过人工移动激光器对准障碍物,存在的定位不准确、人工劳动强度大等问题。
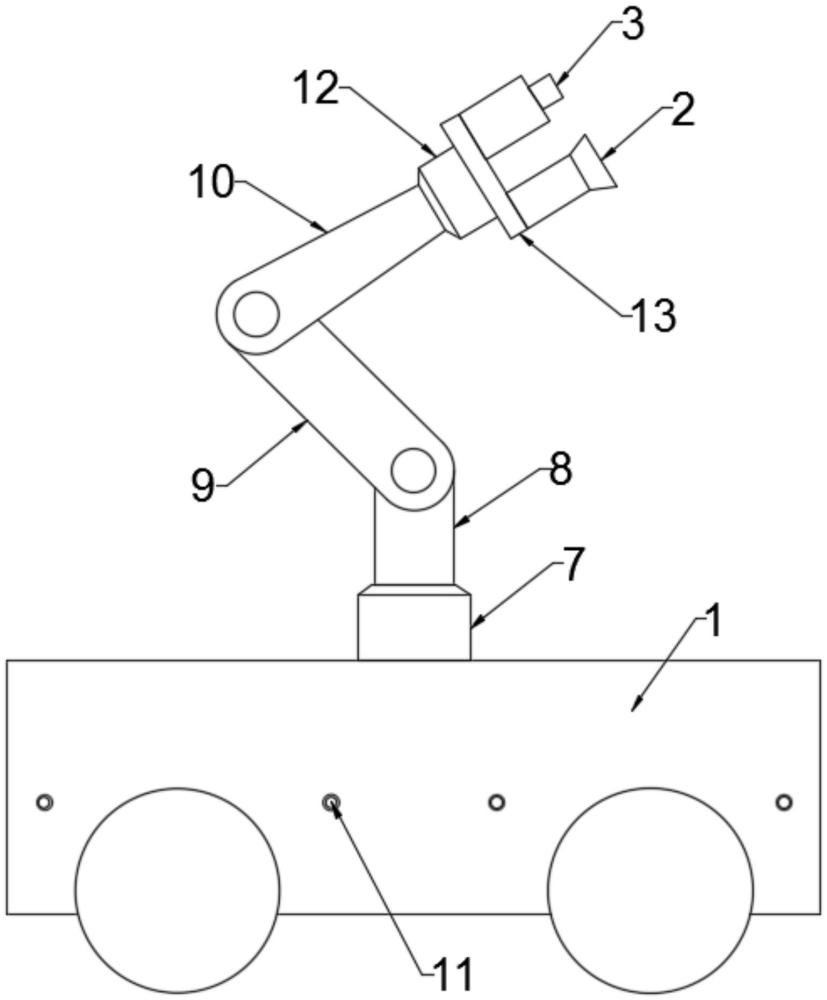
2、本技术第一方面提供了一种车载智能激光清障仪,包括车体,所述车体上安装有控制器以及与控制器连接的图像采集模块、机械臂和激光发射器,所述激光发射器安装在机械臂的末端;所述图像采集模块用于获取架空线路的图像信息,所述控制器根据获取的图像信息对架空线路上的障碍物进行识别定位,并根据障碍物的位置信息控制机械臂移动,使激光发射器瞄准障碍物执行清障作业。
3、本技术提供的技术方案中,通过图像采集模块自动获取架空线路的图像信息,根据图像信息自动识别定位架空线路上的障碍物,并控制机械臂移动激光发射器实现对障碍物的自动瞄准和清障作业;无需人工通过肉眼观察和瞄准障碍物,提高了激光清障的效率和准确性,降低了人工劳动强度。
4、在某些实施方式中,所述激光发射器包括激光器、激光头和调焦组件,所述激光器安装在车体上,所述激光头和调焦组件安装在机械臂的末端,所述激光器的输出端与调焦组件的输入端通过光纤连接,所述调焦组件的输出端与激光头的输入端连接;所述调焦组件与控制器连接,控制器根据障碍物与激光头之间的距离控制调焦组件自适应调整激光的焦距;通过将激光器与激光头分体式安装,可以减轻机械臂末端的负荷,提升机械臂移动激光头瞄准的精度和稳定性;通过在激光头的前端设置调焦组件,可根据障碍物与激光头之间的距离自动调节激光的焦距,使激光的光斑聚焦在障碍物上,提高激光清障的精度和效率。
5、在某些实施方式中,所述调焦组件包括沿光轴依次设置的准直镜组、聚焦镜组和发散镜组,所述准直镜组固定安装在调焦组件的输入端,所述聚焦镜组和/或发散镜组滑动安装在调焦组件的输出端,所述调焦组件还包括驱动部件,所述驱动部件用于驱动聚焦镜组和/或发散镜组沿光轴直线滑动,从而改变聚焦镜组和发散镜组之间的距离,实现对发射激光束的焦距调节。
6、在某些实施方式中,所述机械臂包括依次连接的基座、第一关节臂、第二关节臂和第三关节臂,所述第一关节臂的一端与基座通过方位关节转动连接,所述第一关节臂、第二关节臂、第三关节臂之间均分别通过俯仰关节转动连接,所述激光发射器安装在第三关节臂的末端。
7、在某些实施方式中,所述车体为无人驾驶车,车体的四周均设有避障传感器;控制器根据图像采集模块获取的架空线路的图像信息,控制车体自动沿着架空线路的铺设方向行驶;通过在车体的四周设置避障传感器,可以实现车体在巡检路径上的自动避障;根据获取的架空线路的图像信息,可以控制车体自动沿着架空线路的铺设方向行驶,实现真正意义上的智能巡检和清障作业,无需工作人员跟随车体一起进行巡检和清障,降低了人工劳动强度,提升了车载激光清障仪的智能化。
8、在某些实施方式中,所述机械臂的末端安装有旋转部件,所述旋转部件的输出端安装有转盘,所述图像采集模块和激光发射器安装在转盘上,且图像采集模块的光轴与激光发射器的光轴在转盘上的旋转路径重合;当图像采集模块采集的图像中包含障碍物时,控制器控制机械臂移动使图像采集模块的光轴对准障碍物,然后再控制旋转部件驱动转盘旋转一定的角度,使激光发射器旋转至图像采集模块的位置,从而实现激光发射器的快速瞄准,提高了激光发射器的瞄准效率。
9、在某些实施方式中,所述车体上还安装有通信模块,所述通信模块与后台监测中心通过无线通信方式连接,通信模块用于将图像采集模块获取的图像信息以及车体的运行状态数据实时发送给后台监测中心,方便后台监测中心实时监控激光清障仪的运行状态以及清障效果;当激光清障仪的运行状态异常或清障效果不好时,后台监测中心还可以通过通信模块向控制器发送控制指令,调整激光清障仪的运行状态或重复执行清障作业;还可以通过后台监测中心远程控制车体沿架空线路铺设方向进行巡检,当检测到架空线路上有障碍物时,可通过远程控制机械臂移动激光发射器执行清障作业。
10、本技术第二方面提供了一种清障方法,包括以下步骤:
11、通过图像采集模块获取架空线路的图像信息;
12、根据获取的图像信息识别障碍物的方位;
13、根据障碍物的方位控制机械臂移动激光发射器,使激光发射器瞄准障碍物;
14、控制激光发射器发射激光束清除障碍物。
15、在某些实施方式中,当识别到图像中包含障碍物时,根据图像中两电线之间的像素距离和实际空间中两电线之间的距离,利用相似三角形原理计算障碍物到图像采集模块的距离;再通过机械臂将激光发射器移动至图像采集模块的位置,根据计算的距离调节激光发射器发出激光的焦距,使激光发射器发出的激光束聚焦在障碍物上,从而提高激光清障效率和精度。
16、在某些实施方式中,当识别到图像中包含障碍物时,通过事先训练好的神经网络模型对图像中的障碍物规划最优清障路径,控制器控制机械臂按照规划的最优清障路径移动激光发射器对障碍物进行清障作业;
17、所述神经网络模型的训练过程如下:
18、采集大量包含不同障碍物的架空线路的图像数据构建训练集,并对训练集中的图像进行预处理;
19、在预处理后的图像中标记最优清障路径,最优清障路径为最短清障路径,且最优清障路径需要避开架空线路上的电线;
20、利用标记后的训练集对卷积神经网络进行迭代训练,得到最优清障路径规划模型。
21、本技术通过训练神经网络模型,在避开架空线路上的电线的前提下,基于清障路径最短来规划最优清障路径,既可以避免激光清障过程中损伤电线,还可以最大限度地缩短激光清障路径,从而提高清障效率,减少激光能源消耗。
22、在某些实施方式中,当识别到架空线路的图像中不包含障碍物时,控制器控制车体自动沿着架空线路的铺设方向行驶;根据电线在图像中的位置信息自动识别车体是否偏离架空线路的铺设方向,当车体的行驶方向与架空线路的铺设方向一致时,图像中两条电线均分布在中央位置;通过计算两条电线与图像中心线的距离,得到车体行驶方向的偏移量,当偏移量超过设定偏移阈值时,控制车体自动矫正行驶方向。
23、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288152.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表