一种地面移动机器人弯道控制方法及系统
- 国知局
- 2024-09-05 14:47:39
本发明涉及移动机器人行走控制领域,具体涉及一种地面移动机器人弯道控制方法及系统。
背景技术:
1、自主移动机器人已经广泛应用于各类场景,比如物流工厂、特种环境、军事战争等,具体的应用方式有运输、探索、搜救、采集数据、操作设备、清理、打击等。机器人在运行的过程中经常会遇到狭窄区域而受到影响,尤其是高速运行的机器人,在窄跨度大曲率弯道处十分容易发生碰撞。
2、移动机器人的常用局部规划方法,例如:dwa、teb和mpc,在处理窄跨度大曲率弯道时存在一些不足之处,它们缺乏对弯道进行针对性规划的能力,常用局部规划方法对于窄跨度大曲率弯道的处理,均可描述为离散分段性的:目标追踪、避障、目标追踪、避障……,直到机器人通过弯道。然而,dwa方法未明确考虑弯道的特性,因此在处理大曲率弯道时可能无法有效规划路径;teb方法基于弹性带理论,通过在时间上对机器人的轨迹进行调整来规划路径;mpc方法使用模型来预测机器人的状态,通常使用线性化模型,难以准确描述大曲率弯道的非线性特性。
3、在各类应用自主移动机器人的场景中,路径规划和轨迹规划是实现自主导航功能的核心步骤。机器人运动时每一时刻的目标位姿由路径规划功能提供,目标速度由轨迹规划功能提供。具体而言,路径规划算法通常是通过图搜索获取到一条机器人当前位置到目标位置的最短路线,该路线由一组离散的空间坐标点组成。轨迹规划器以这些空间坐标点为局部目标,由机器人运动学、机器人和障碍间的距离、机器人运动效率、机器人硬件参数对规划过程进行软/硬约束,实时生成轨迹驱动机器人移动。尽管经过障碍膨胀以后,机器人可以安全地走过u形弯这类窄跨度大曲率路径,由于路径在生成的过程中只考虑了路径最短的性质而没有对机器人的速度、机器人的空间尺寸进行考量,换言之机器人并不知道自己是在过弯道,只是单纯地追踪目标路径点,因此很容易在直行状态下冲出入弯位置,偏离弯道部分的路径点,需要在状态估计更新以后将自身二次调整回到下一目标点的位置。这样的情况对应用机器人的空间、机器人能量都是一种浪费。
4、现有技术中,申请号为cn201910180624.9、名称为一种自动导引装置的弯道速度规划方法、装置的专利申请,该方法通过实时获取路径信息,计算路径的曲率范围,将设备的速度与路径曲率进行线性映射,以实现面向不同曲率路径配置不同速度。然而对于自主移动机器人而言,常规情况下机器人发生转弯的唯一条件是全局规划器基于离线地图规划出了转弯的路径,这一工作在机器人导航起步时就可以完成,通过该路径即可确认机器人需要转弯的位置,所以机器人在运动过程中实时计算路径曲率是不必要的。其次,路径是一组离散的坐标点,要计算曲率首先要做曲线拟合,然后再通过对拟合函数求导计算曲率,过程较为繁琐。第三,路径分析过程与控制过程之间具有时延,方法中没有明确指出如何判定入弯点和出弯点,从哪里开始对速度进行控制。第四,只通过路径曲率条件控速不够全面。
5、针对上述的现有技术存在的问题设计一种地面移动机器人弯道控制方法及系统是本发明研究的目的。
技术实现思路
1、本发明的目的在于提出一种地面移动机器人弯道控制方法及系统,在路径规划生成的路径中提取各段微分路径之间的距离和角度信息的方法,以实现机器人在弯道部分路径的自主导航中做出减速处理。
2、为实现上述目的,本发明的技术方案是:
3、一种地面移动机器人弯道控制方法,包括以下步骤:
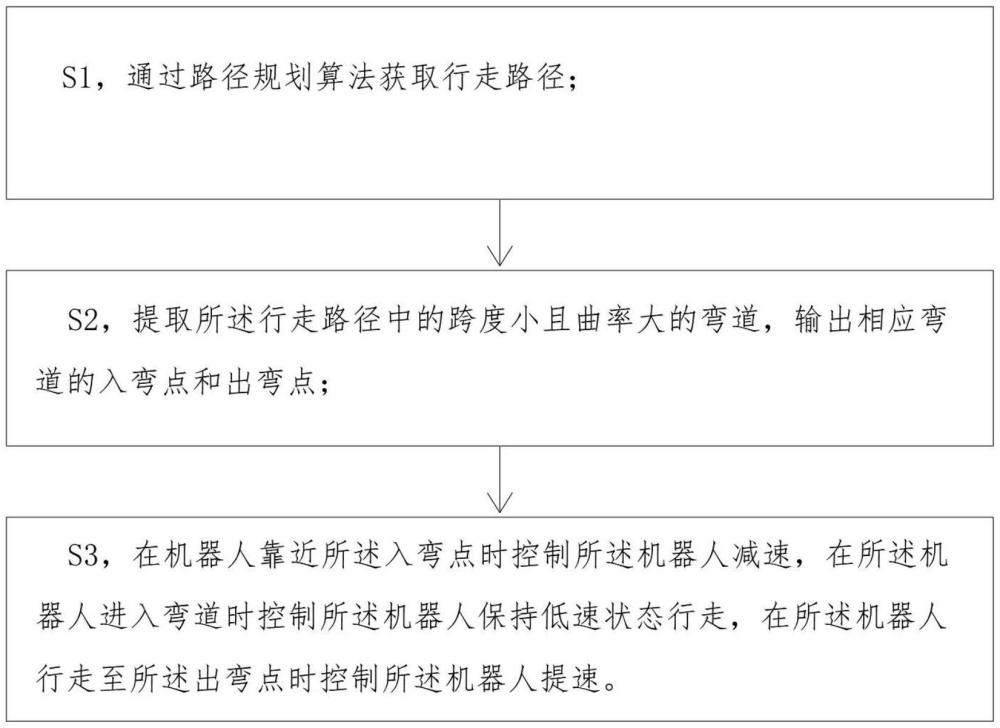
4、s1,通过路径规划算法获取行走路径;
5、s2,提取所述行走路径中的跨度小且曲率大的弯道,输出相应弯道的入弯点和出弯点;
6、s3,在机器人靠近所述入弯点时控制所述机器人减速,在所述机器人进入弯道时控制所述机器人保持低速状态行走,在所述机器人行走至所述出弯点时控制所述机器人提速。
7、进一步地,所述行走路径包括若干路径点,所述路径点为依次升序的平面坐标序列,统计所述路径点的数量,若所述路径点的数量低于路径点数量阈值时,以单弯道算法提取所述行走路径中的跨度小且曲率大的弯道,输出相应弯道的入弯点和出弯点,否则以多弯道算法提取所述行走路径中的跨度小且曲率大的弯道,输出相应弯道的入弯点和出弯点。
8、进一步地,以单弯道算法提取所述行走路径中的跨度小且曲率大的弯道,输出相应弯道的入弯点和出弯点包括:
9、计算任意两个微路径之间的方向角度差,所述微路径为相邻的所述路径点的连线,微路径的方向从序号小的路径点指向序号大的路径点,所述微路径的方向角度与序号小的路径点捆绑,提取角度差满足角度阈值条件的路径点对;
10、计算所述路径点对的沿路径距离,提取所述沿路径距离小于距离阈值的路径点对;
11、将所述路径点对分离,输出相应弯道的入弯点和出弯点。
12、进一步地,输出相应弯道的入弯点和出弯点包括:
13、建立二维坐标系,得到每个所述路径点的坐标;
14、针对所提取的沿路径距离小于距离阈值的所有路径点对,提取所述所有路径点对中起始路径点的坐标求平均得到所述入弯点,提取所述所有路径点对中结束路径点的坐标求平均得到所述出弯点。
15、进一步地,输出相应弯道的入弯点和出弯点包括:
16、针对所提取的沿路径距离小于距离阈值的所有路径点对,提取所有路径点对中起始路径点,将序号最小的所述起始路径点作为所述入弯点,提取所有路径点对中结束路径点,将序号最大的所述结束路径点作为所述出弯点。
17、进一步地,以多弯道算法提取所述行走路径中的跨度小且曲率大的弯道,输出相应弯道的入弯点和出弯点包括:
18、创建空白图像;
19、通过所有的所述路径点在所述空白图像上绘制二值曲线图;
20、分析所述二值曲线图的各部分梯度的幅度和方向,获取出二值曲线图中所有的弯道图像。
21、保留所述弯道图像中梯度差大于第二角度阈值的若干曲线段;
22、提取各个曲线段的二维坐标,以每段坐标中序号最小的点为入弯点,以每段坐标中序号最大的点为出弯点。
23、进一步地,通过所有的所述路径点在所述空白图像上绘制二值曲线图之前,执行:建立二维坐标系,获得各个所述路径点的坐标,建立所述空白图像和所述二维坐标系之间的映射关系;
24、保留所述弯道图像中梯度差大于第二角度阈值的若干曲线段之后,执行:根据所述映射关系将若干所述曲线段逆映射回所述二维坐标系。
25、进一步地,通过所有的所述路径点在所述空白图像上绘制二值曲线图之后,执行:
26、对不可导的路径折点进行平滑处理。
27、进一步地,所述控制方法在所述机器人出发时执行,若所述机器人行走的过程中停止,则回到步骤s1。
28、进一步地,本技术还提供一种地面移动机器人弯道控制系统,包括以下模块:
29、路径规划模块,用于通过路径规划算法获取行走路径;
30、关键点输出模块,用于提取所述行走路径中的跨度小且曲率大的弯道,输出相应弯道的入弯点和出弯点;
31、速度控制模块,用于在机器人靠近所述入弯点时控制所述机器人减速,在所述机器人进入弯道时控制所述机器人保持低速状态行走,在所述机器人行走至所述出弯点时控制所述机器人恢复速度;
32、所述控制系统运行时执行所述的一种地面移动机器人弯道控制方法。
33、相较于现有技术,本发明具有以下有益效果:
34、本技术从机器人移动速度过快或驱动元件的制动能力不足这一原因出发,提出在路径规划生成的路径中提取各段微分路径之间的距离和角度信息的方法,以实现机器人在弯道部分路径的自主导航中做出减速处理。
35、本技术通过路径点的数量判断行走路径中存在单弯道或多弯道,针对单弯道或多弯道执行不同的计算策略,可以在单弯道情况下通过足够的计算量得到更为准确的入弯点和出弯点,而在多弯道的情况下通过图像分析的计算方法,减少计算量,从而更快地得到入弯点和出弯点。
36、本技术通过对单弯道中的各个路径点计算方向角度差和满足角度阈值条件的路径点对之间的沿路径距离,从而筛选得到对应的弯道,以及根据路径点对的坐标,计算得到出弯点和入弯点。本技术通过图像分析的方法,对多弯道提取各个弯道曲线,再根据曲线的起始点和结束点得到入弯点和出弯点。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288144.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表