一种复杂环境钻孔轮廓精准拟合方法
- 国知局
- 2024-09-05 14:50:56
本发明属于图像数据处理领域,特别涉及一种复杂环境钻孔轮廓精准拟合方法。
背景技术:
1、在地质工作中,通常把用钻机向地下钻凿成的直径较小而具有一定深度的井孔称为钻孔。钻孔测量在钻孔质量检测、钻孔定向、矿产资源评估、建井工程等方面起着极其重要的作用。一个钻孔的典型施工周期可概述为“放样-打孔-找孔”的循环,依托凿岩台车等大型机械设备,进行放样和打孔以可实现自动化安全快速施工,而对已形成的钻孔的定位,除却自钻自装情况,普遍仍停留在人工测量对孔的状态,这严重延长了钻孔的施工周期,制约了钻孔全自动施工的发展。
2、目前,现有技术中通常采用投票(聚类)方法、随机hough变换椭圆检测算法和基于弧段的方法等传统椭圆检测方法对钻孔轮廓进行自动检测以进行定位钻孔、放样等操作,其面向的对象多为日常生活场景,边缘图像中待检测椭圆的轮廓清晰而完整,且与背景轮廓具有较大的差别,因而查准难度较低。而由于复杂施工条件下的钻孔轮廓图像中检测对象的数量和位置不明,边缘图像中还包含着庞大数量的干扰边缘,而且受隧洞衬砌不平整表面、复杂光照条件和图像拍摄质量等的影响,重点关注的钻孔轮廓往往是残缺的并混叠在干扰边缘中,这无疑大大增加了钻孔口轮廓的检测难度,使得传统椭圆检测方法的精准度降低,并不适用于复杂施工环境。
3、因此,如何提供一种复杂环境钻孔轮廓精准拟合方法,以在复杂施工环境下精准拟合钻孔椭圆形轮廓,是本领域技术人员亟需解决的问题。
技术实现思路
1、本发明所要解决的技术问题是现有技术中在隧道、地下厂房等复杂施工环境下难以通过传统椭圆检测方法精准拟合钻孔口轮廓椭圆等技术问题。
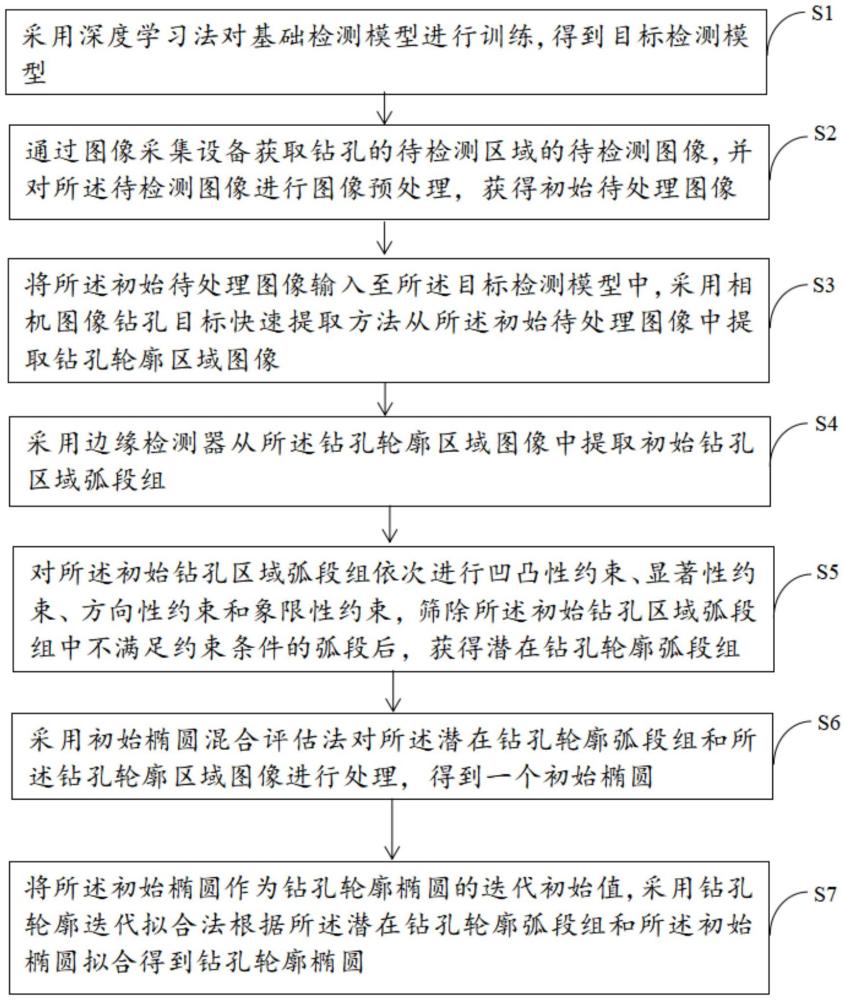
2、为了解决上述问题,本发明提供了一种复杂环境钻孔轮廓精准拟合方法,包括:s1采用深度学习法对基础检测模型进行训练,得到目标检测模型;s2通过图像采集设备获取钻孔的待检测区域的待检测图像,并对所述待检测图像进行图像预处理,获得初始待处理图像;s3将所述初始待处理图像输入至所述目标检测模型中,采用相机图像钻孔目标快速提取方法从所述初始待处理图像中提取钻孔轮廓区域图像;s4采用边缘检测器从所述钻孔轮廓区域图像中提取初始钻孔区域弧段组;s5对所述初始钻孔区域弧段组依次进行凹凸性约束、显著性约束、方向性约束和象限性约束,筛除所述初始钻孔区域弧段组中不满足约束条件的弧段后,获得潜在钻孔轮廓弧段组;s6采用初始椭圆混合评估法对所述潜在钻孔轮廓弧段组和所述钻孔轮廓区域图像进行处理,得到一个初始椭圆;s7将所述初始椭圆作为钻孔轮廓椭圆的迭代初始值,采用钻孔轮廓迭代拟合法根据所述潜在钻孔轮廓弧段组和所述初始椭圆拟合得到钻孔轮廓椭圆。
3、作为本发明的再进一步技术方案是,s1中,所述采用深度学习法对基础检测模型进行训练,得到目标检测模型包括:s101从目标工程区域内获取若干个包含钻孔口的学习图像,对若干个所述学习图像分别进行图像预处理得到若干个预处理图像,标记每一个所述预处理图像中的钻孔口轮廓的外接矩形框,通过若干个所述外接矩形框形成钻孔轮廓图像数据库,将所述钻孔轮廓图像数据库按比例拆分成训练数据库和测试数据库;s102将所述训练数据库输入到基础检测模型中,对所述基础检测模型的模型网络权重进行训练,并使用所述测试数据库计算所述基础检测模型的检测准确率,判断所述检测准确率是否达到预设值;s103若是,则得到所述目标检测模型;若否,则重复所述s102,直至所述检测准确率达到所述预设值后,得到所述目标检测模型。
4、作为本发明的再进一步技术方案是,s3中,所述采用相机图像钻孔目标快速提取方法从所述初始待处理图像中提取钻孔轮廓区域图像包括:通过所述目标检测模型获取所述初始待处理图像中钻孔轮廓的目标矩形框的长宽和中心坐标,以所述目标矩形框的中心坐标为中心,以倍数的目标矩形框的长宽作为钻孔轮廓区域的长宽,从所述初始待处理图像中截取出钻孔轮廓区域,对所述钻孔轮廓区域进行自适应直方图平衡,得到钻孔轮廓区域图像。
5、作为本发明的再进一步技术方案是,s4中,所述采用边缘检测器从所述钻孔轮廓区域图像中提取初始钻孔区域弧段组包括:采用边缘检测器获取所述钻孔轮廓区域图像中的若干个边缘点,将若干个所述边缘点进行连接,得到若干条边缘弧段,将若干条所述边缘弧段组合形成所述初始钻孔区域弧段组;所述边缘检测器包括canny边缘检测器或edgedrawi ng边缘检测器。
6、作为本发明的再进一步技术方案是,s5中,所述对所述初始钻孔区域弧段组依次进行凹凸性约束、显著性约束、方向性约束和象限性约束,筛除所述初始钻孔区域弧段组中不满足约束条件的弧段后,获得潜在钻孔轮廓弧段组包括:s501根据式(1)按照点序依次计算所述初始钻孔区域弧段组中的每条所述边缘弧段中各点的类斜率并在类斜率的正负号发生变化处将每条所述边缘弧段打断得到若干条新弧段,将若干条所述新弧段组合形成新弧段组;
7、
8、所述式(1)中,为第i条边缘弧段的第j个点的类斜率,为第i条边缘弧段的第j个点的x轴对应坐标,为第i条边缘弧段的第j个点的y轴对应坐标,为第i条边缘弧段的第j+1个点的x轴对应坐标,为第i条边缘弧段的第j+1个点的y轴对应坐标;s502应用显著性约束,筛除所述新弧段组中长度小于第一预设阈值的所述新弧段后,得到显著弧段组;s503将所述显著弧段组中的每条所述新弧段按照式(2)区分为朝向中心弧段和背向中心弧段,筛除所述显著弧段组中的背向中心弧段,得到由若干条朝向中心弧段组成的朝向中心弧段组;
9、
10、所述式(2)中,ωi为第i条新弧段,ωforward为朝向中心弧段,{ωforward}为朝向中心弧段组,ωbackward为背向中心弧段,{ωbackward}为背向中心弧段组,为第i条新弧段的第j个点,n0为第二预设阈值,为以第i条新弧段的起点、第i条新弧段的终点及所述钻孔轮廓区域图像的中点为三个角点构成的特征三角形;s504根据式(3)将所述朝向中心弧段组中的若干条所述朝向中心弧段进行区分,得到四象限弧段组;
11、
12、所述式(3)中,{ω1}为第一象限的弧段组,{ω2}为第二象限的弧段组,{ω3}为第三象限的弧段组,{ω4}为第四象限的弧段组,u为每条所述朝向中心弧段外接矩形被朝向中心弧段分割出来的上半部分的面积,o为每条所述朝向中心弧段外接矩形被朝向中心弧段分割出来的下半部分的面积;s505筛除所述四象限弧段组中不在所属象限坐标范围的朝向中心弧段后,得到所述潜在钻孔轮廓弧段组。
13、作为本发明的再进一步技术方案是,s6中,所述采用初始椭圆混合评估法对所述潜在钻孔轮廓弧段组和所述钻孔轮廓区域图像进行处理得到一个初始椭圆包括:s601将所述潜在钻孔轮廓弧段组中的所有边缘点选择为有效边缘点,并对所述有效边缘点使用最小二乘法进行椭圆拟合,拟合后得到拟合椭圆旋转角θarc;s602从-90°~90°中选取一个倾角,所述倾角的斜率为k,在所述钻孔轮廓区域图像上等间距绘制若干条斜率为k的直线,若干条所述直线组成直线组,将所述直线组中的每一条所述直线上的像素点取出对应形成一条测线,若干个所述测线组成测线组;s603使用阈值分割算法将所述测线组中的一条所述测线内的所有像素区分为深色类像素和浅色类像素,计算所述深色类像素的重心到钻孔轮廓区域图像的中心点的斜率km,并根据式(4)计算初始椭圆旋转角θtemp;
14、
15、所述式(4)中,h为所述目标矩形框的高,w为所述目标矩形框的宽,α为第一辅助算子,β为第二辅助算子,k’为校正斜率,n为所述目标矩形框的高宽比;s604重复步骤s603计算所述测线组中的每一条所述测线对应的一个初始椭圆旋转角,通过评估法从若干个所述初始椭圆旋转角中评估出所述测线组对应的中间椭圆旋转角θk;s605重复步骤s602~步骤s604,得到由若干个中间椭圆旋转角θk组成的中间椭圆旋转角组{θk},通过评估法从拟合椭圆旋转角θarc与中间椭圆旋转角组{θk}中评估确定最终初始椭圆旋转角θinit;s606根据式(5)确定所述初始椭圆的半长轴长ainit和所述初始椭圆的半短轴长binit,并将所述钻孔轮廓区域图像的中心点作为所述初始椭圆的中心点,得到所述初始椭圆;
16、
17、作为本发明的再进一步技术方案是,s7中,采用钻孔轮廓迭代拟合法根据所述潜在钻孔轮廓弧段组和所述初始椭圆拟合得到钻孔轮廓椭圆包括:s701根据式(6)计算所述潜在钻孔轮廓弧段组中每一个所述边缘点到所述初始椭圆的代数距离dj,一个所述边缘点对应一个所述代数距离,将若干个所述代数距离按照大小排序,从大到小依次选出n个所述代数距离所对应的n个所述边缘点,将n个所述边缘点从钻孔轮廓弧段组中的全部边缘点中删除,得到若干个剩余边缘点,所述n为所述钻孔轮廓弧段组中全部边缘点的个数的m倍;
18、
19、所述式(6)中,a、b、c、d、e、f分别为椭圆的一般式方程中任意椭圆方程的系数;s702统计所述剩余边缘点的数量,判断所述剩余边缘点的数量是否低于预设的数量阈值;若是,则将当前迭代的椭圆作为所述钻孔轮廓椭圆;若否,则使用最小二乘方法拟合椭圆,并根据式(7)计算当前第i迭代的椭圆与第i-1迭代的椭圆间的等效交并比eioui,i-1;
20、
21、所述式(7)中,为第i迭代的椭圆的最小外接矩形与第i-1迭代的椭圆间的最小外接矩形的相交区域的面积,为第i迭代的椭圆的最小外接矩形与第i-1迭代的椭圆间的最小外接矩形的相并区域的面积;判断eioui,i-1是否大于设定的收敛阈值,若是,则将当前迭代的椭圆作为所述钻孔轮廓椭圆;若否,则重新进行s701~s702操作。
22、作为本发明的再进一步技术方案是,所述基础检测模型包括yolo模型或fastrcnn模型;所述图像预处理包括畸变校正、灰度化和自适应直方图平衡。
23、作为本发明的再进一步技术方案是,所述阈值分割算法包括k-means聚类算法或otsu阈值分割算法;所述评估法包括均值评估、众数评估或中位数评估。
24、作为本发明的再进一步技术方案是,第w迭代的椭圆的最小外接矩形由四个角点{rw}约束,rw通过式(8)获得;
25、rw={(xcos(θ)-ysin(θ),xsin(θ)+ycos(θ))|x=±a,y=±b} (8);
26、其中,w为i或i-1;a为所述第w迭代的椭圆的半长轴的长度,b为所述第w迭代的椭圆的半短轴的长度,θ为所述第w迭代的椭圆的旋转角的角度。。
27、有益效果:本发明提出了一种复杂环境钻孔轮廓精准拟合方法,首先采用深度学习法对基础检测模型进行训练得到目标检测模型,再通过图像采集设备获取钻孔的待检测区域的待检测图像,并对所述待检测图像进行图像预处理,获得初始待处理图像,然后将所述初始待处理图像输入至所述目标检测模型中,采用相机图像钻孔目标快速提取方法从所述初始待处理图像中提取钻孔轮廓区域图像,以通过目标检测模型实现对初始待处理图形中钻孔目标的快速检测,且基于深度学习的目标检测模型具有较高的抗干扰效果;采用边缘检测器从所述钻孔轮廓区域图像中提取初始钻孔区域弧段组,再对所述初始钻孔区域弧段组依次进行凹凸性约束、显著性约束、方向性约束和象限性约束,筛除所述初始钻孔区域弧段组中不满足约束条件的弧段也即剔除噪声弧段后,获得潜在钻孔轮廓弧段组,然后采用初始椭圆混合评估法对所述潜在钻孔轮廓弧段组和所述钻孔轮廓区域图像进行处理,进一步剔除噪声弧段,得到一个初始椭圆,最后将所述初始椭圆作为钻孔轮廓椭圆的迭代初始值,采用钻孔轮廓迭代拟合法根据所述潜在钻孔轮廓弧段组和所述初始椭圆拟合得到钻孔轮廓椭圆,通过使用基于计算机视觉的相关理论对钻孔轮廓区域图像中的钻孔轮廓椭圆进行细致而精准的椭圆拟合,具有较高的椭圆精度,并与深度学习相结合,能够实现隧道、地下厂房等复杂的现场施工环境下的钻孔轮廓的稳健拟合,更加可靠、准确和稳定,且仅需要工业相机等图像采集设备即可实现,成本低廉且操作快速部署方便。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288437.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表