基于深度学习的隧道洞口明暗分界里程预测方法与流程
- 国知局
- 2024-09-11 14:16:45
本技术涉及隧道设计,尤其涉及基于深度学习的隧道洞口明暗分界里程预测方法。
背景技术:
1、在隧道洞口的设计中,明暗分界里程的选择将直接影响到隧道洞门类型、洞门长度、明洞长度等设计参数的选择,进而影响到隧道进出口的施工安全和效率。现有的技术手段为了确定合适的隧道洞口明暗分界里程,需要设计人员凭借经验综合衡量地形与隧道的相对位置、地形的开挖难易度等因素。对于进口或出口,其主要流程为:(1)选择设计起始里程到终止里程间的某个里程作为潜在的明暗分界里程;(2)绘制步骤(1)中该里程对应的地形、隧道横纵断面图;(3)观察步骤(2)中横纵断面上地形与隧道的相对位置、地形的变化趋势图;(4)重新选取新的里程作为潜在的明暗分界里程,并重复步骤(2)和(3)直至找到合适的隧道洞口明暗分界里程。可以看出,隧道洞口明暗分界里程的设计需要不断迭代尝试,设计过程耗时耗力,进口和出口没有统一的方法需要分别独立设计,且高度依赖于设计人员的经验,导致隧道洞口明暗分界里程的设计效率和精度低。
2、因此,如何有效提高隧道洞口明暗分界里程的设计效率和精度是目前亟需解决的一个问题。
3、上述内容仅用于辅助理解本技术的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本技术的主要目的在于提供一种基于深度学习的隧道洞口明暗分界里程预测方法,旨在解决如何有效提高隧道洞口明暗分界里程的设计效率和精度的技术问题。
2、为实现上述目的,本技术提出一种基于深度学习的隧道洞口明暗分界里程预测方法,所述的方法包括:
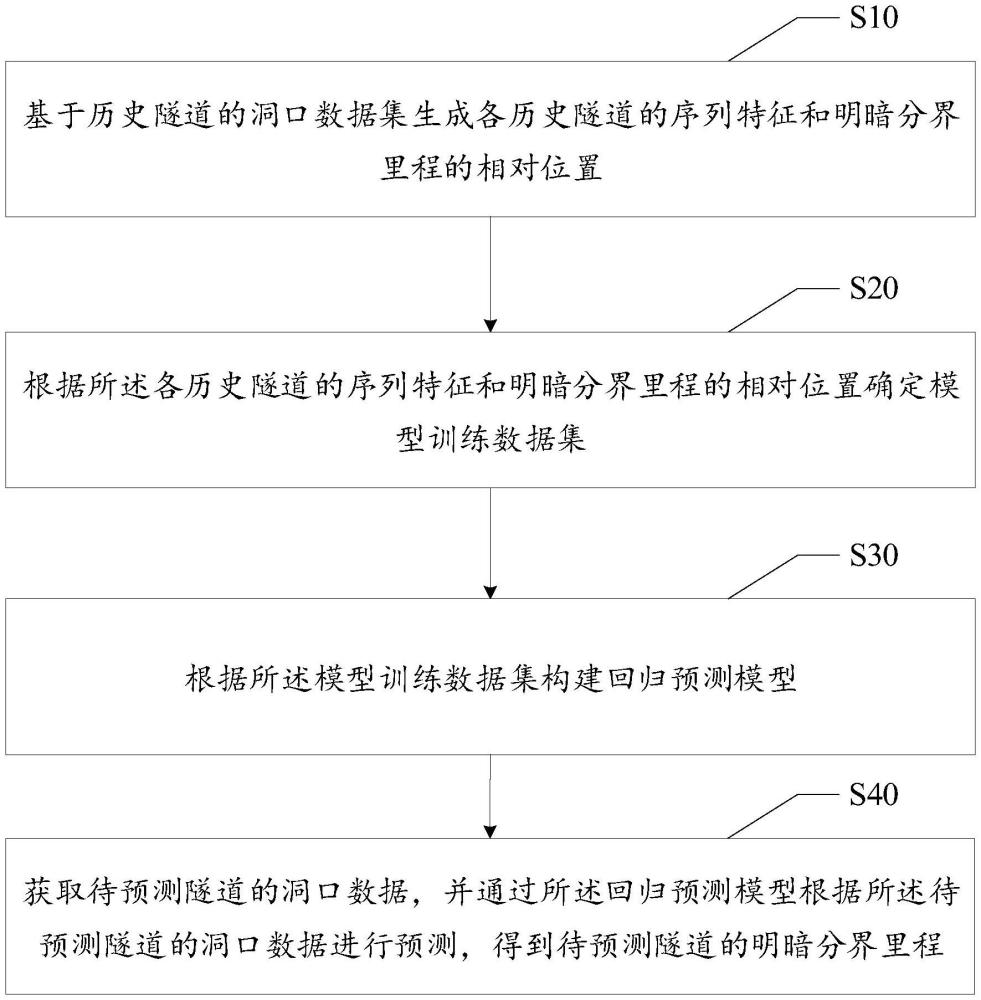
3、基于历史隧道的洞口数据集生成各历史隧道的序列特征和明暗分界里程的相对位置;
4、根据所述各历史隧道的序列特征和明暗分界里程的相对位置确定模型训练数据集;
5、根据所述模型训练数据集构建回归预测模型;
6、获取待预测隧道的洞口数据,并通过所述回归预测模型根据所述待预测隧道的洞口数据进行预测,得到待预测隧道的明暗分界里程。
7、在一实施例中,所述基于历史隧道的洞口数据集生成各历史隧道的序列特征和明暗分界里程的相对位置,包括:
8、基于所述历史隧道的洞口数据集确定各历史隧道的离散地形点云数据、各历史隧道的明暗分界里程和各历史隧道的隧道位置信息;
9、根据所述各历史隧道的离散地形点云数据和所述各历史隧道的隧道位置信息构造各历史隧道的序列特征;
10、根据所述各历史隧道的明暗分界里程进行编码,得到各历史隧道的明暗分界里程的相对位置。
11、在一实施例中,所述根据所述各历史隧道的离散地形点云数据和所述各历史隧道的隧道位置信息构造各历史隧道的序列特征,包括:
12、根据所述各历史隧道的隧道位置信息确定各历史隧道的隧道轴线的设计起始里程、隧道轴线的设计终止里程、隧道半径和隧道中心位置;
13、根据所述设计起始里程和所述设计终止里程确定隧道设计范围;
14、基于所述隧道设计范围和预设距离间隔确定隧道轴线上的预设数量的里程点,其中,所述预设数量的里程点是均匀分布的;
15、获取所述预设数量的里程点对应的横断面,根据所述横断面对所述各历史隧道的离散地形点云数据进行线性插值,得到各历史隧道的均匀地形点云数据;
16、根据所述均匀地形点云数据、所述隧道中心位置、所述隧道半径确定横断面上的特征;
17、基于所述横断面上的特征生成各历史隧道的序列特征。
18、在一实施例中,所述根据所述各历史隧道的明暗分界里程进行编码,得到各历史隧道的明暗分界里程的相对位置,包括:
19、根据所述各历史隧道的隧道轴线的设计起始里程、隧道轴线的设计终止里程以及各历史隧道的明暗分界里程分别进行转换,得到设计起始里程的位置信息、设计终止里程的位置信息以及明暗分界里程的位置信息;
20、根据所述设计起始里程的位置信息、设计终止里程的位置信息以及明暗分界里程的位置信息进行编码,得到各历史隧道的明暗分界里程的相对位置。
21、在一实施例中,所述根据所述模型训练数据集构建回归预测模型,包括:
22、将所述模型训练数据集根据预设比例进行划分,生成训练集和验证集;
23、根据所述训练集对预设深度学习模型进行训练,得到训练后的深度学习模型;
24、根据所述验证集对所述训练后的深度学习模型进行验证,得到验证集的模型均方误差损失值;
25、在所述验证集的模型均方误差损失值达到预设阈值时,将所述训练后的深度学习模型作为回归预测模型。
26、在一实施例中,所述根据所述训练集对预设深度学习模型进行训练,得到训练后的深度学习模型,包括:
27、将所述训练集中的序列特征输入至所述预设深度学习模型,得到预测的相对位置;
28、根据所述预测的相对位置和训练集中的序列特征对应的相对位置进行计算,得到训练集的模型均方误差损失值;
29、根据所述训练集的模型均方误差损失值优化所述预设深度学习模型的权重参数和偏置项,得到训练后的深度学习模型。
30、在一实施例中,所述通过所述回归预测模型根据所述待预测隧道的洞口数据进行预测,得到待预测隧道的明暗分界里程,包括:
31、根据所述待预测隧道的洞口数据构造待预测序列特征;
32、对所述待预测序列特征进行标准化,得到标准化的待预测序列特征;
33、将所述标准化的待预测序列特征输入至所述回归预测模型进行预测,得到待预测隧道的明暗分界里程的相对位置;
34、根据所述待预测隧道的明暗分界里程的相对位置进行反编码,得到待预测隧道的明暗分界里程。
35、此外,为实现上述目的,本技术还提出一种基于深度学习的隧道洞口明暗分界里程预测装置,所述基于深度学习的隧道洞口明暗分界里程预测装置包括:
36、生成模块,用于基于历史隧道的洞口数据集生成各历史隧道的序列特征和明暗分界里程的相对位置;
37、确定模块,用于根据所述各历史隧道的序列特征和明暗分界里程的相对位置确定模型训练数据集;
38、构建模块,用于根据所述模型训练数据集构建回归预测模型;
39、预测模块,用于获取待预测隧道的洞口数据,并通过所述回归预测模型根据所述待预测隧道的洞口数据进行预测,得到待预测隧道的明暗分界里程。
40、此外,为实现上述目的,本技术还提出一种基于深度学习的隧道洞口明暗分界里程预测设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如上文所述的基于深度学习的隧道洞口明暗分界里程预测方法的步骤。
41、此外,为实现上述目的,本技术还提出一种存储介质,所述存储介质为计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上文所述的基于深度学习的隧道洞口明暗分界里程预测方法的步骤。
42、此外,为实现上述目的,本技术还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现如上文所述的基于深度学习的隧道洞口明暗分界里程预测方法的步骤。
43、本技术提供了一种基于深度学习的隧道洞口明暗分界里程预测方法,本技术通过首先基于历史隧道的洞口数据集生成各历史隧道的序列特征和明暗分界里程的相对位置,以提高数据的代表性和准确性;根据所述各历史隧道的序列特征和明暗分界里程的相对位置确定模型训练数据集,以提高数据集中数据样本的准确性;根据所述模型训练数据集构建回归预测模型,以提高回归预测模型的预测精度;获取待预测隧道的洞口数据,并通过所述回归预测模型根据所述待预测隧道的洞口数据进行预测,得到待预测隧道的明暗分界里程,有效提高隧道洞口明暗分界里程的设计效率和精度。
44、综上可知,本技术通过基于已设计和施工的历史隧道的洞口数据集提取序列特征、编码明暗分界里程相对位置,并通过模型训练数据集建立深度学习回归预测模型,进而预测得到待预测隧道的明暗分界里程,克服了隧道洞口明暗分界里程的设计效率和精度低的技术缺陷,有效提高隧道洞口明暗分界里程的设计效率和精度。
本文地址:https://www.jishuxx.com/zhuanli/20240911/289970.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。