一种基于超像素的海杂波动态分布背景下的航海雷达目标快速检测方法、程序、设备及存储介质
- 国知局
- 2024-09-14 14:34:43
本发明属于海洋环境条件下舰船目标探测,具体涉及一种基于超像素的海杂波动态分布背景下的航海雷达目标快速检测方法、程序、设备及存储介质。
背景技术:
1、在复杂的海洋环境中,航海雷达广泛应用于舰船航行,用于引导舰船躲避海上障碍物,保障舰船的航行安全。因此,航海雷达能够对目标实现真实有效的检测具有重要意义。
2、经典的海杂波背景下的目标检测算法主要是恒虚警率(constant falsealarmrate,cfar)算法,通过海杂波分布建立的模型用于目标背景杂波估计,以达到恒虚警的效果,完成目标检测。当雷达分辨率较低、小擦地角、低海况时,海杂波比较均匀且平稳,认为此时幅度分布符合高斯或瑞利分布,针对此分布1968年finn hm等人首次提出单元平均恒虚警率(cell average,ca-cfar)检测算法,但该方法在多目标情况下分辨率较差(finnhm,johnson r s.adaptive detection mode with threshold control as a functionof spatially sampled clutter level estimates[j].rcareview,1968,29(9):414-464.)。因此,在高斯或瑞利分布下为了进一步提高多目标情况下的cfar检测性能,1983年,rohling提出了有序类恒虚警率(os-cfar)(rohling h.radar cfar thresholding inclutter and multiple target situations[j].ieee transactions onaes,1983,19(4):608-621.)。
3、随着雷达分辨率的提高在小擦地角、低海况时海杂波更接近对数正态(log-normal)分布,针对此分布2022年段亭宇等人提出了一种非相干cfar检测方法,可以有效的进行杂波抑制,对高速运动目标检测性能改善明显(段亭宇,水鹏朗,封天.对数正态纹理海杂波背景非相干cfar检测方法[j].西安电子科技大学学报,2022,49(05):1-8.)。随着雷达分辨率、掠射角、海况的增加,海杂波幅度分布更符合韦布尔、k分布,当海杂波符合韦布尔分布时,印玉栋等人提出了一种基于os-cfar的反馈控制双参数double parameter os-cfar检测器,该算法针对weibull分布具有较强的波适应性,同时与传统的双参数cfar相比可以大大降低虚警率(印玉栋,秦振杰,范时胜,等.weibull杂波背景下的双参数cfar检测器[j].空军雷达学院学报,2010,24(4):247-250.)。对于海杂波服从k分布张亮、计科峰等提出了对sar图像杂波建模的局部自适应acca-cfar目标检测算法,该算法在海面杂波背景中具有较少的虚警,可以完整地检测出目标,保留更精细的结构特征(张亮,李禹,计科峰,等.sar图像局部自适应acca-cfar检测算法[j].电子与信息学报,2009,31(01):160-163.)。但当处于雷达高分辨率、大掠射角、高海况时,海杂波不再符合单一海杂波模型海杂波模型,更加服从混合分布模型,2009年,rosenberg、crisp和stacy发现常用的k分布难以对所有的海杂波的分布进行精细建模,并提出了更为精确的kk分布(rosenberg l,crispd,stacyn.analysis ofthe kk-distribution with x-band medium grazing angle sea-clutter[c].ieee international radar conference,bordeaux,france,2009:1-6.)。2019年刘恒燕等人通过对某海杂波数据进行拟合,提出了k+rayleigh(k+r)模型,有效拟合实测数据中传统的k分布模型偏差较大的部分(刘恒燕,熊伟,宋杰,等.大入射余角海杂波相关特性分析及幅度拟合[j].电光与控制,2019,26(06):60-64.)。2021年杨斌等人提出了海杂波的ww分布模型,更好的解释了海杂波拟合的重拖尾现象(杨斌,黄默,王长元,等.x波段小擦地角海杂波ww分布建模[j].太赫兹科学与电子信息学报,2021,19(05):916-921.)。
4、由于海杂波愈加复杂难以准确建模以及无法准确的给出相应的检测器,2014年,宗成明利用分形理论实现了航海雷达图像目标粗检测,无需进行海杂波建模,但未实现目标点的经检测(宗成明.基于分形理论的航海雷达目标检测研究与实现[d].哈尔滨工程大学,2014.)。针对此问题2023年,曹宇提出了一种基于方差分形的真实海杂波分布的cfar目标检测算法,该方法只需采用真实海杂波分布,无需建立复杂的模型,大大提高了目标检测准确率(曹宇.基于真实海杂波航海雷达恒虚警率目标检测[d].哈尔滨工程大学,2023.)。综上,基于海杂波分布模型的cfar技术的目标检测方法,只能适应特定的海杂波情况,无法满足时空变化复杂的海杂波,检测率不稳定。并且海杂波分布建模日趋复杂多样,难以给出与之匹配的检测器。同时cfar检测技术在进行目标检测时需要对雷达图像进行逐线逐点检测,导致目标检测效率低。
技术实现思路
1、本发明的目的在于解决现有的海杂波模型下的恒虚警率目标检测的检测率不稳定以及cfar检测效率低的问题,提供一种基于超像素的海杂波动态分布背景下的航海雷达目标快速检测方法。
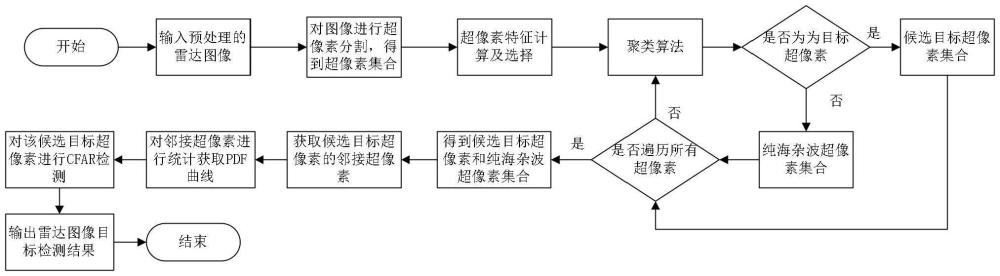
2、一种基于超像素的海杂波动态分布背景下的航海雷达目标快速检测方法,包括以下步骤:
3、步骤1:采集待检测的雷达图像,对其进行预处理;
4、步骤2,对待检测雷达图像进行超像素分割得到超像素集合,并计算超像素加权信息熵,利用k-means聚类算法进行目标快速检测,得到候选目标超像素集合和纯海杂波超像素集合;
5、步骤3:对于候选目标超像素集合中的每个候选目标超像素,计算其与纯海杂波超像素集合中每个纯海杂波超像素的曼哈顿距离,取对应曼哈顿距离最小的指定数量的纯海杂波超像素作为该候选目标超像素的邻接超像素;对每个候选目标超像素的所有邻接超像素进行数据拟合,获取对应该候选目标超像素的海杂波动态特性曲线;
6、步骤4:采用海杂波动态分布下的恒虚警率检测器对每个候选目标超像素的海杂波动态特性曲线进行逐点精检测,汇总所有候选目标超像素中各像素点的检测结果,得到整幅待检测雷达图像的目标检测结果。
7、进一步地,所述步骤2中对雷达图像进行超像素分割得到超像素集合的方法具体为:
8、步骤2.1:初始化设置预分割超像素总数k,空间距离和颜色距离平衡参数m;
9、步骤2.2:对于具有m条扫描线,每条扫描线具有n个回波信号点的雷达图像,在间隔s个像素的规则网格中均匀采样k个初始化种子点ci=[lci,xci,yci];其中,xci,yci为种子点ci的坐标,lci为种子点ci的灰度值;
10、步骤2.3:对于每个种子点ci,以自身为中心,选取2s×2s的搜索范围,计算搜索范围内各像素点bj=[lbj,xbj,ybj]与种子点ci的相似距离dij;
11、
12、步骤2.4:对于每个像素点bj,取对应相似距离dij最小的种子点ci作为像素点bj所属超像素的中心点;
13、步骤2.5:更新各种子点ci的坐标xci,yci,并根据更新后的坐标获取对应位置的灰度值lci;
14、对于种子点ci,若以其为所属超像素中心点的像素点bj有j个,则更新种子点ci的坐标为
15、步骤2.6:重复步骤2.3至步骤2.5,直至所有种子点坐标位置不再发生变化后,完成超像素分割,实际得到k1个超像素rz。
16、进一步地,所述步骤2中计算超像素加权信息熵的方法具体为:
17、
18、其中,hzmax表示超像素rz中灰度级值的最大值,表示超像素rz中灰度级值的平均值;pzh表示灰度级值h在超像素rz中出现的概率。
19、进一步地,所述步骤2中利用k-means聚类算法进行目标快速检测,得到候选目标超像素集合和纯海杂波超像素集合的方法具体为:
20、步骤2.2.1:在加权信息熵集合中,随机选取q个加权信息熵作为聚类中心;
21、步骤2.2.2:对于加权信息熵集合中每一个非聚类中心的加权信息熵,计算其与每个聚类中心的欧式距离
22、
23、其中,表示第z1个聚类中心对应的加权信息熵;表示第z2个非聚类中心的加权信息熵;
24、步骤2.2.3:对于每一个非聚类中心的加权信息熵取对应欧式距离最小的为其聚类中心;
25、步骤2.2.4:对于每一个以为聚类中心的加权信息熵集合,取所有加权信息熵的平均值作为新的聚类中心,即为以为聚类中心的加权信息熵的数量;
26、步骤2.2.5:重复步骤2.2.2至步骤2.2.4,直至所有聚类中心不再变化,完成超像素的分类;取对应超像素数量最少的聚类作为候选目标超像素集合rtarget,其余的超像素聚类合并构成纯海杂波超像素集合rclutter。
27、进一步地,所述步骤3中对于候选目标超像素集合中的每个候选目标超像素,计算其与纯海杂波超像素集合中每个纯海杂波超像素的曼哈顿距离的方法具体为:
28、
29、其中,表示属于纯海杂波超像素的所有像素点bj;为候选目标超像素的中心点坐标。
30、进一步地,所述步骤4中采用海杂波动态分布下的恒虚警率检测器对每个候选目标超像素的海杂波动态特性曲线进行逐点精检测的方法具体为:
31、对于每个候选目标超像素对应的海杂波动态特性曲线根据设定的虚警率pfa计算检测门限
32、
33、对于候选目标超像素中的每个像素点bj进行逐点精检测,若则判定候选目标超像素中的像素点bj为目标点。
34、一种计算机装置/设备/系统,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器执行所述计算机程序以实现上述基于超像素的海杂波动态分布背景下的航海雷达目标快速检测方法的步骤。
35、一种计算机可读存储介质,其上存储有计算机程序/指令,该计算机程序/指令被处理器执行时实现上述基于超像素的海杂波动态分布背景下的航海雷达目标快速检测方法的步骤。
36、一种计算机程序产品,包括计算机程序/指令,该计算机程序/指令被处理器执行时实现上述基于超像素的海杂波动态分布背景下的航海雷达目标快速检测方法的步骤。
37、本发明的有益效果在于:
38、本发明解决了强目标对海杂波分布模型的干扰的问题,可以提高海杂波分布模型的准确度。本发明无需对整幅雷达图像进行逐线逐点检测,通过粗检测和精检测相结合的方式降低了目标检测虚警率,提高了检测效率。
本文地址:https://www.jishuxx.com/zhuanli/20240914/294848.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。