小型自治水下机器人电源冗余分配管理系统
- 国知局
- 2024-09-14 14:43:42
本发明涉及水下机器人电源管理控制系统,具体地说是一种小型自治水下机器人电源冗余分配管理系统。
背景技术:
1、随着人们对极地地区的探索逐渐深入,利用水下机器人进行极地冰底观测成为重要的手段之一。然而,目前的主要观测数据片段化,缺乏对极区冰底的长期观测数据,这使得对极地地区对全球环境的数据依据不够充足。这就要求在确保auv在极区冰底巡航以及观测时的安全性的前提下,auv应具有长期的观测能力,即所搭载的电力能源能够保证auv在一段较长的时间内对极区冰底的复杂环境进行长期的观测。
技术实现思路
1、针对现有技术的上述不足,本发明目的在于提高auv在极区冰底观测的安全性,同时使所搭载电池能源能够被合理地利用,进而提高auv的续航能力,保证在极区恶劣环境下的长期观测能力,具体的技术方案如下:
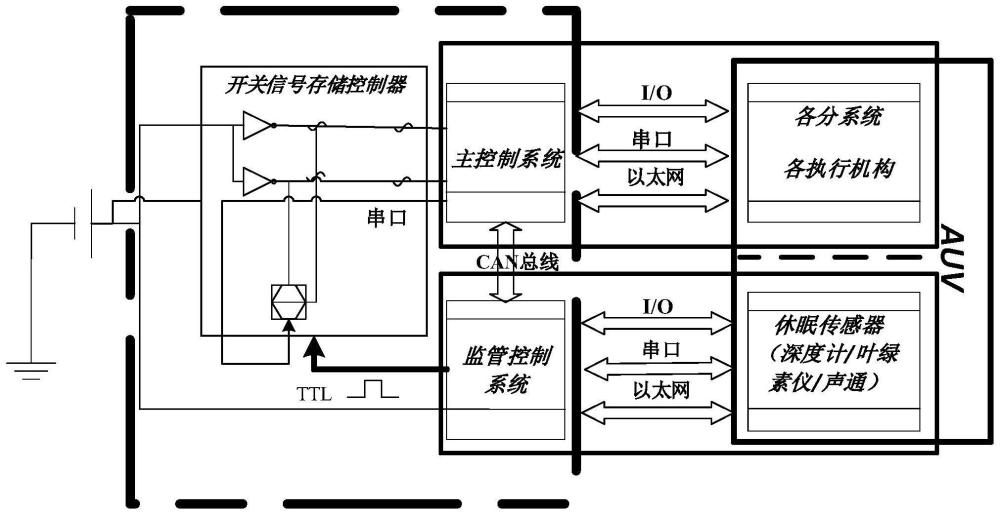
2、小型自治水下机器人电源冗余分配管理系统,包括:在机器人主体上配置主控制系统、监管控制系统、开关信号存储控制器、电源;控制主控制系统、监管控制系统、开关信号存储控制器相互配合,实现水下机器人在不同工作状态的电源分配管理;
3、所述主控制系统,用于巡航任务状态时将auv的电源分配给所需的用电设备;与监管控制系统通过can总线进行通信反馈运行状态;与开关信号存储控制器通过串口通信连接反馈当前状态;
4、所述监管控制系统,用于休眠任务状态时将auv的电源分配给休眠观测时所需的传感器;通过can总线接收来自主控制系统的状态信号,并当主控制系统出现故障时强制重启主控制系统;休眠任务状态完成后通过can总线唤醒主控制系统;
5、所述开关信号存储控制器,接收来自主控制系统的串口信号以及监管控制系统的ttl电平信号生成开关切换指令,改变连接在主控制系统的控制电信号,从而切换主控制系统的运行状态,以及记录任务期间的开关切换指令;
6、所述电源,为电池组,用于通过开关信号存储控制器、主控制系统、监管控制系统、为各用电设备供电;所述用电设备包括各分系统、传感器以及执行器。
7、所述各分系统包括auv搭载的通信分系统、导航分系统、辅助分系统;所述传感器包括摄像头、照明灯光、前视声纳、侧扫声呐、深度高度计、ctd、溶解氧仪、叶绿素仪、光通量仪以及超短基线定位;所述执行器包括若干推进器或舵机的电机。
8、所述主控制系统包括依次连接的或门逻辑门电路、电磁继电器k3、主控系统计算机、电源分配电路,所述或门逻辑门电路连接开关信号存储控制器;主控系统计算机还通过串口通信接口连接开关信号存储控制器,通过can收发接口连接监管控制系统。
9、所述监管控制系统包括依次连接的ttl信号发送单元、监管控制系统计算机、电源分配电路,所述ttl信号发送单元连接开关信号存储控制器;还通过can收发接口连接主控系统。
10、所述开关信号存储控制器包括:电源分别经过两个非门逻辑门电路分别连接电磁继电器k1、k2后连接至主控制系统;信号分析计算机通过ttl信号接收单元连接监管控制系统,还通过继电器控制器分别连接电磁继电器k1、k2控制端,通过串口通信接口连接主控制系统;还设有用于存储系统状态代码的状态数据存储器。
11、所述状态数据存储器包括一个“栈”结构,用于存储状态序列号。
12、所述控制主控制系统、监管控制系统、开关信号存储控制器相互配合,实现水下机器人在不同工作状态的电源分配管理,包括:
13、巡航状态:系统上电,开关信号状态存储控制器、监管控制系统上电;监管控制系统向主控制系统发送状态请求信号、根据主控系统传回的应答信号发送ttl电平周期信号至开关信号存储控制器;主控制系统发送工作状态信号至开关信号存储控制器;信号分析计算机生成状态序列号并触发继电器控制器,使得电磁继电器k1闭合、k2断开,主控制系统上电并执行巡航任务;
14、故障状态:巡航状态中主控制系统通过can总线周期性发送应答信号,若设定周期内监管控制系统未收到应答信号,则信号分析计算机根据状态数据存储器的栈顶数据判断主控制系统是否故障,并当故障判断成立后,监管控制系统发送ttl周期电平信号,触发继电器控制器使电磁继电器k1断开、k2闭合,并强制重启主控制系统的电源,执行auv返航作业;
15、休眠状态:巡航状态中当auv到达目标点开启休眠模式用于进行长期观测,主控制系统通过can总线发送指令信号,监管控制系统收到指令信号后,发送ttl周期电平信号至开关信号存储控制器,开关信号存储控制器同时断开电磁继电器k1、k2,主控制系统断电进入休眠模式;此时,监管控制系统输出指令给传感器供电;
16、唤醒状态:休眠状态中观测任务完成时,监管控制系统发送can总线信号与ttl电平信号重新唤醒主控制系统,使得开关信号存储控制器控制电磁继电器k1、k2同时闭合,待主控系统计算机开启完毕,电磁继电器k2断开,进入巡航状态,返航或继续到达下一个观测目标点。
17、所述工作状态包括:“0”表示主控系统计算机停止工作,“1”表示主控系统计算机正在运行。
18、所述ttl电平周期信号与当前电源冗余分配管理系统的工作状态相对应:
19、“10”表示主控制系统正常工作,auv进入巡航状态;
20、“01”表示主控制系统发生故障,需要强制唤醒主控制系统进行返航作业;
21、“00”表示主控制系统进入休眠状态,监管控制系统接管载荷系统的部分传感器进行auv的静态冰底观测;
22、“11”表示唤醒状态,系统由监管休眠模式进入正常巡航模式。
23、所述信号分析计算机生成状态序列号并触发继电器控制器,包括:
24、信号分析计算机根据ttl信号接收单元接收的ttl周期电平信号、主控制系统发送串口信号,生成新的状态序列号并与状态数据存储器中栈顶序列号比较并判断是否一致;若不一致,将当前状态序列号压栈保存并触发继电器控制器工作改变工作状态,否则删除当前状态序列号并保持当前工作状态。
25、本发明具有以下有益效果及优点:
26、1.本发明设计一种小型自治极地水下机器人电源冗余分配管理系统,采用模块化的设计思想,对auv所搭载的电力能源进行有效的分配,使能源得到了合理地利用,增加了极地auv在冰底观测的续航能力。
27、2.本发明设有对主控制系统的多重冗余监管控制,在主控制系统出现问题的情况下,仍保证了auv安全返航的能力,提高了auv在复杂极区环境下的安全性与可靠性。
28、3.本发明设有状态转换存储机制,在后续auv岸上保养维护中,提高了恶劣环境下对auv保养维护的效率,可节省大量维护保养的时间。
技术特征:1.小型自治水下机器人电源冗余分配管理系统,其特征在于包括:在机器人主体上配置主控制系统、监管控制系统、开关信号存储控制器、电源;控制主控制系统、监管控制系统、开关信号存储控制器相互配合,实现水下机器人在不同工作状态的电源分配管理;
2.根据权利要求1所述的小型自治水下机器人电源冗余分配管理系统,其特征在于,所述各分系统包括auv搭载的通信分系统、导航分系统、辅助分系统;所述传感器包括摄像头、照明灯光、前视声纳、侧扫声呐、深度高度计、ctd、溶解氧仪、叶绿素仪、光通量仪以及超短基线定位;所述执行器包括若干推进器或舵机的电机。
3.根据权利要求1所述的小型自治水下机器人电源冗余分配管理系统,其特征在于,所述主控制系统包括依次连接的或门逻辑门电路、电磁继电器k3、主控系统计算机、电源分配电路,所述或门逻辑门电路连接开关信号存储控制器;主控系统计算机还通过串口通信接口连接开关信号存储控制器,通过can收发接口连接监管控制系统。
4.根据权利要求1所述的小型自治水下机器人电源冗余分配管理系统,其特征在于,所述监管控制系统包括依次连接的ttl信号发送单元、监管控制系统计算机、电源分配电路,所述ttl信号发送单元连接开关信号存储控制器;还通过can收发接口连接主控系统。
5.根据权利要求1所述的小型自治水下机器人电源冗余分配管理系统,其特征在于,所述开关信号存储控制器包括:电源分别经过两个非门逻辑门电路分别连接电磁继电器k1、k2后连接至主控制系统;信号分析计算机通过ttl信号接收单元连接监管控制系统,还通过继电器控制器分别连接电磁继电器k1、k2控制端,通过串口通信接口连接主控制系统;还设有用于存储系统状态代码的状态数据存储器。
6.根据权利要求1所述的小型自治水下机器人电源冗余分配管理系统,其特征在于,所述状态数据存储器包括一个“栈”结构,用于存储状态序列号。
7.根据权利要求1所述的小型自治水下机器人电源冗余分配管理系统,其特征在于,所述控制主控制系统、监管控制系统、开关信号存储控制器相互配合,实现水下机器人在不同工作状态的电源分配管理,包括:
8.根据权利要求7所述的一种小型自治水下机器人电源冗余分配管理系统,其特征在于,所述工作状态包括:“0”表示主控系统计算机停止工作,“1”表示主控系统计算机正在运行。
9.根据权利要求7所述的一种小型自治水下机器人电源冗余分配管理系统,其特征在于,所述ttl电平周期信号与当前电源冗余分配管理系统的工作状态相对应:
10.根据权利要求4所述的一种小型自治水下机器人电源冗余分配管理系统,其特征在于,所述信号分析计算机生成状态序列号并触发继电器控制器,包括:
技术总结本发明涉及小型自治水下机器人电源冗余分配管理系统,包括在机器人主体上配置主控制系统、监管控制系统、开关信号存储控制器、电源;通过控制主控制系统、监管控制系统、开关信号存储控制器相互配合,实现水下机器人在不同工作状态的电力分配管理。本发明采用模块化设计思想,对AUV所搭载的电力能源进行有效分配,使能源得到合理地利用,增加了极地AUV在冰底观测的续航能力。本发明设有对主控制系统的多重冗余监管控制,在主控制系统出问题时,仍保证AUV安全返航,提高AUV在复杂极区环境下的安全性与可靠性。本发明设有状态转换存储机制,在后续AUV岸上保养维护中,提高恶劣环境下对AUV保养维护效率,可节省大量维护保养时间。技术研发人员:王宇梁,阎述学,于得勇,李一平,曾俊宝受保护的技术使用者:中国科学院沈阳自动化研究所技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/295699.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。