一种企业无人厨房菜量定容机构的制作方法
- 国知局
- 2024-09-14 14:58:18
本发明涉及厨房用具,较为具体的,涉及到一种企业无人厨房菜量定容机构。
背景技术:
1、目前在食堂的操作流程中,主要采用人工的方式将份盘中的菜分装在小碗或小碟中,对提交较大的菜品无法精准均分,不同种类的菜品均分前,需要人工清洗漏斗,工作量大,操作人易疲劳,工作效率低下,且分装的菜品分量不均匀,容易引起客人不满,导致客户体验不佳。
2、针对这种情形,专利号为cn 215605226u的实用新型专利提出一种自动分餐机构,通过设置容置腔可实现连续分菜,提高了分菜效率;通过设置可旋转的分料槽,加快菜肴在储料斗和餐盘之间的转移,能够有效提高分菜效率。
3、但是,采用这种菜品分餐机构,不能进行定量分菜。
4、有鉴于此,本发明提出一种自动化程度高的、结构简单的,能够进行定量分菜的装置。
技术实现思路
1、有鉴于此,本发明提出一种企业无人厨房菜量定容机构,包括至少一个装菜仓10,所述装菜仓10的上部的外侧开设有装菜口11,所述装菜仓10远离装菜口11的一端连接旋转轴20,所述装菜仓10的底部连接螺旋输送机构30,所述螺旋输送机构30的输出端位于分盘漏斗40的上部,所述螺旋输送机构30包括电机31、螺旋杆32,所述螺旋杆32位于所述装菜仓10的底部的凹型处,所述螺旋杆32的一端穿出所述装菜仓10与电机31连接,另一端连接菜量定容机构60,先通过旋转轴20旋转分盘漏斗40至餐盘位置,随后通过电机31带动螺旋杆32的转动来输送菜品至菜量定容机构60定量,当菜品达到需要的量时,所述菜量定容机构60打开,随后下落至分盘漏斗40并下落至餐盘进行装盘,自动化程度高、结构简单,能够进行定量分菜。
2、一种企业无人厨房菜量定容机构,其特征在于:包括至少一个装菜仓10,所述装菜仓10的上部的外侧开设有装菜口11,所述装菜仓10远离装菜口11的一端连接旋转轴20,所述装菜仓10的底部连接螺旋输送机构30,所述螺旋输送机构30的输出端位于分盘漏斗40的上部,所述螺旋输送机构30包括电机31、螺旋杆32,所述螺旋杆32位于所述装菜仓10的底部的凹型处,所述螺旋杆32的一端穿出所述装菜仓10与电机31连接,另一端连接菜量定容机构60,先通过旋转轴20旋转分盘漏斗40至餐盘位置,随后通过电机31带动螺旋杆32的转动来输送菜品至菜量定容机构60定量,当菜品达到需要的量时,所述菜量定容机构60打开,随后下落至分盘漏斗40并下落至餐盘进行装盘。
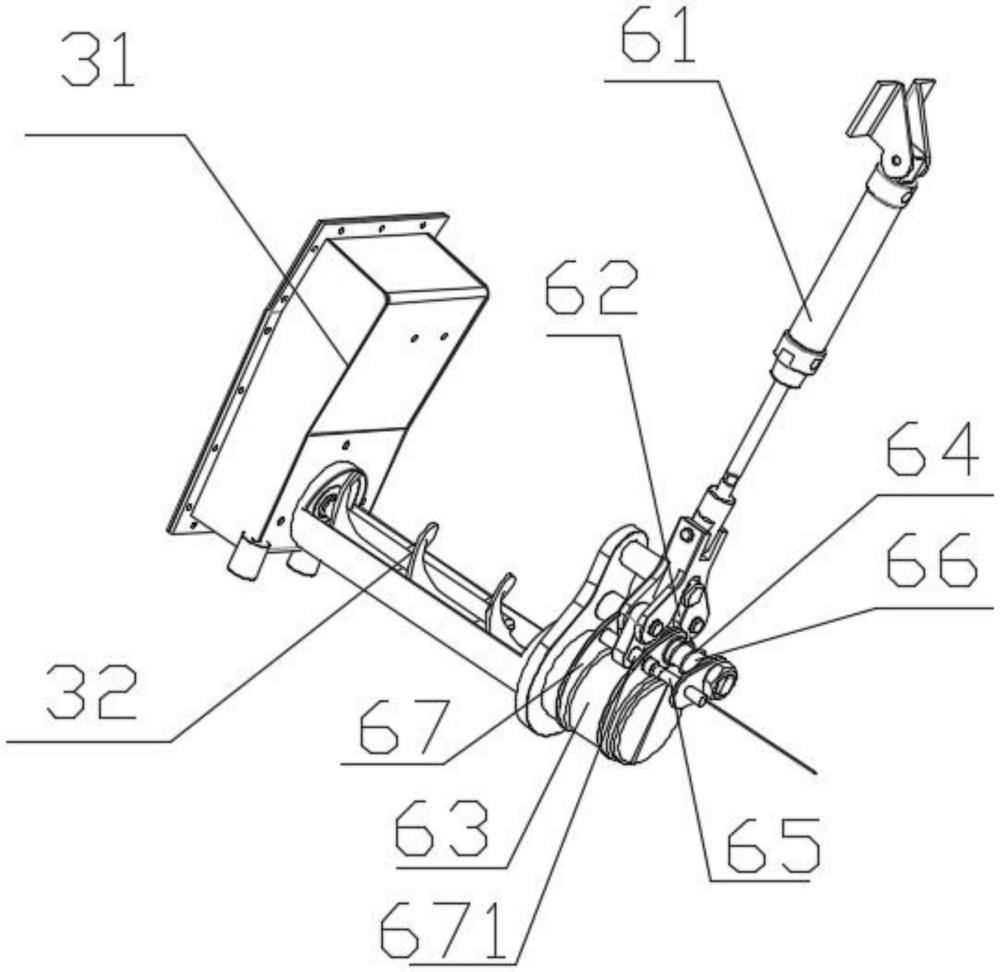
3、在一些实施例中,所述菜量定容机构60包括气缸61、推杆组件62、定量仓63、弹性件64和感应器65,所述定量仓63位于所述螺旋输送机构30的输出端并与输出端连通,所述定量仓63的上部套接有固定轴66,所述固定轴66与所述装菜仓10外壁的垂直连接,所述定量仓63能在固定轴66上前后移动或者转动,所述固定轴66的远离所述装菜仓10外壁的一端设有感应器65,所述感应器65与定量仓63之间设有弹性件64,所述定量仓63包括相对设置的两个子定量仓631,所述子定量仓631通过推杆组件62连接气缸61,当菜品装入通过所述螺旋输送机构30装入所述定量仓63并达到所述定量仓63的量后,定量仓63向感应器65移动压缩弹性件64并使得定量仓63接触到感应器65,感应器65通知气缸61进行运动,气缸61推动推杆组件62将定量仓63打开,将菜品下落至分盘漏斗40。
4、进一步的,所述子定量仓631的外周设有旋转安装片67,所述旋转安装片67的一端与所述固定轴66套接,所述旋转安装片67的本体与所述子定量仓631的外壁固定连接。
5、进一步的,同一所述子定量仓631的旋转安装片67为至少两个时,所述旋转安装片67间隔均匀设置。
6、进一步的,所述旋转安装片67的本体的上部设有连接杆671,所述连接杆671与所述旋转安装片67垂直设置。
7、进一步的,其中一个所述连接杆671远离所述装菜仓10外壁的一端与所述感应器65的接触端在同一直线上,当所述子定量仓631带动连接杆671移动,当连接杆671与感应器65接触时,感应器65通知气缸61进行运动。
8、进一步的,所述推杆组件62包括三头连接件621,所述连接件的一头连接气缸61,另外两个头分别通过摆臂622连接所述连接杆671,通过气缸61推动三头连接件621,三头连接件621控制摆臂622使得所述子定量仓631绕固定轴66转动来到达所述定量仓63的打开或者闭合。
9、进一步的,分别连接所述子定量仓631的三头连接件621的两个头对称设置,分别连接所述子定量仓631的三头连接件621的两个头之间设有滑道68,所述装菜口11的外侧壁的对应滑道68位置设有滑块69,所述滑块69与滑道68配合连接,使得三头连接件621只能做上下的直线运动。
10、进一步的,当所述装菜仓10至少两个时,所述装菜仓10围绕旋转轴20的中心间隔均匀设置,用于装盘不同的菜品。
11、进一步的,所述分盘漏斗40的底部连接有集料管70,所述集料管70的一端连接所述分盘漏斗40,另一端朝向餐盘的一凹槽处且正好位于该凹槽的上方,由于凹槽的体积较小,故而需要集料管70将菜品聚拢后进行集中装盘。
12、本发明的有益效果:本发明提出一种企业无人厨房菜量定容机构,包括至少一个装菜仓10,所述装菜仓10的上部的外侧开设有装菜口11,所述装菜仓10远离装菜口11的一端连接旋转轴20,所述装菜仓10的底部连接螺旋输送机构30,所述螺旋输送机构30的输出端位于分盘漏斗40的上部,所述螺旋输送机构30包括电机31、螺旋杆32,所述螺旋杆32位于所述装菜仓10的底部的凹型处,所述螺旋杆32的一端穿出所述装菜仓10与电机31连接,另一端连接菜量定容机构60,先通过旋转轴20旋转分盘漏斗40至餐盘位置,随后通过电机31带动螺旋杆32的转动来输送菜品至菜量定容机构60定量,当菜品达到需要的量时,所述菜量定容机构60打开,随后下落至分盘漏斗40并下落至餐盘进行装盘,自动化程度高、结构简单,能够进行定量分菜。
技术特征:1.一种企业无人厨房菜量定容机构,其特征在于:包括至少一个装菜仓(10),所述装菜仓(10)的上部的外侧开设有装菜口(11),所述装菜仓(10)远离装菜口(11)的一端连接旋转轴(20),所述装菜仓(10)的底部连接螺旋输送机构(30),所述螺旋输送机构(30)的输出端位于分盘漏斗(40)的上部,所述螺旋输送机构(30)包括电机(31)、螺旋杆(32),所述螺旋杆(32)位于所述装菜仓(10)的底部的凹型处,所述螺旋杆(32)的一端穿出所述装菜仓(10)与电机(31)连接,另一端连接菜量定容机构(60),先通过旋转轴(20)旋转分盘漏斗(40)至餐盘位置,随后通过电机(31)带动螺旋杆(32)的转动来输送菜品至菜量定容机构(60)定量,当菜品达到需要的量时,所述菜量定容机构(60)打开,随后下落至分盘漏斗(40)并下落至餐盘进行装盘。
2.如权利要求1所述的企业无人厨房菜量定容机构,其特征在于:所述菜量定容机构(60)包括气缸(61)、推杆组件(62)、定量仓(63)、弹性件(64)和感应器(65),所述定量仓(63)位于所述螺旋输送机构(30)的输出端并与输出端连通,所述定量仓(63)的上部套接有固定轴(66),所述固定轴(66)与所述装菜仓(10)外壁的垂直连接,所述定量仓(63)能在固定轴(66)上前后移动或者转动,所述固定轴(66)的远离所述装菜仓(10)外壁的一端设有感应器(65),所述感应器(65)与定量仓(63)之间设有弹性件(64),所述定量仓(63)包括相对设置的两个子定量仓(631),所述子定量仓(631)通过推杆组件(62)连接气缸(61),当菜品装入通过所述螺旋输送机构(30)装入所述定量仓(63)并达到所述定量仓(63)的量后,定量仓(63)向感应器(65)移动压缩弹性件(64)并使得定量仓(63)接触到感应器(65),感应器(65)通知气缸(61)进行运动,气缸(61)推动推杆组件(62)将定量仓(63)打开,将菜品下落至分盘漏斗(40)。
3.如权利要求2所述的企业无人厨房菜量定容机构,其特征在于:所述子定量仓(631)的外周设有旋转安装片(67),所述旋转安装片(67)的一端与所述固定轴(66)套接,所述旋转安装片(67)的本体与所述子定量仓(631)的外壁固定连接。
4.如权利要求3所述的企业无人厨房菜量定容机构,其特征在于:同一所述子定量仓(631)的旋转安装片(67)为至少两个时,所述旋转安装片(67)间隔均匀设置。
5.如权利要求3所述的企业无人厨房菜量定容机构,其特征在于:所述旋转安装片(67)的本体的上部设有连接杆(671),所述连接杆(671)与所述旋转安装片(67)垂直设置。
6.如权利要求5所述的企业无人厨房菜量定容机构,其特征在于:其中一个所述连接杆(671)远离所述装菜仓(10)外壁的一端与所述感应器(65)的接触端在同一直线上,当所述子定量仓(631)带动连接杆(671)移动,当连接杆(671)与感应器(65)接触时,感应器(65)通知气缸(61)进行运动。
7.如权利要求2所述的企业无人厨房菜量定容机构,其特征在于:所述推杆组件(62)包括三头连接件(621),所述连接件的一头连接气缸(61),另外两个头分别通过摆臂(622)连接所述连接杆(671),通过气缸(61)推动三头连接件(621),三头连接件(621)控制摆臂(622)使得所述子定量仓(631)绕固定轴(66)转动来到达所述定量仓(63)的打开或者闭合。
8.如权利要求7所述的企业无人厨房菜量定容机构,其特征在于:分别连接所述子定量仓(631)的三头连接件(621)的两个头对称设置,分别连接所述子定量仓(631)的三头连接件(621)的两个头之间设有滑道(68),所述装菜口(11)的外侧壁的对应滑道(68)位置设有滑块(69),所述滑块(69)与滑道(68)配合连接,使得三头连接件(621)只能做上下的直线运动。
9.如权利要求1所述的企业无人厨房菜量定容机构,其特征在于:当所述装菜仓(10)至少两个时,所述装菜仓(10)围绕旋转轴(20)的中心间隔均匀设置,用于装盘不同的菜品。
10.如权利要求1所述的企业无人厨房菜量定容机构,其特征在于:所述分盘漏斗(40)的底部连接有集料管(70),所述集料管(70)的一端连接所述分盘漏斗(40),另一端朝向餐盘的一凹槽处且正好位于该凹槽的上方,由于凹槽的体积较小,故而需要集料管(70)将菜品聚拢后进行集中装盘。
技术总结本发明提出一种企业无人厨房菜量定容机构,包括至少一个装菜仓,装菜仓的上部的外侧开设有装菜口,装菜仓远离装菜口的一端连接旋转轴,装菜仓的底部连接螺旋输送机构,螺旋输送机构的输出端位于分盘漏斗的上部,螺旋输送机构包括电机、螺旋杆,螺旋杆位于装菜仓的底部的凹型处,螺旋杆的一端穿出装菜仓与电机连接,另一端连接菜量定容机构,先通过旋转轴旋转分盘漏斗至餐盘位置,随后通过电机带动螺旋杆的转动来输送菜品至菜量定容机构定量,当菜品达到需要的量时,菜量定容机构打开,随后下落至分盘漏斗并下落至餐盘进行装盘,自动化程度高、结构简单,能够进行定量分菜。技术研发人员:刘昌钧,周水來,周珮閔受保护的技术使用者:江苏国唯智能机器人有限公司技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/296542.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表