一种多机器人分散式事件触发一致性混杂控制系统及方法与流程
- 国知局
- 2024-10-09 16:09:19
本发明属于多机器人系统协同控制,尤其涉及一种多机器人分散式事件触发一致性混杂控制系统及方法。
背景技术:
1、多机器人系统是指由多个具有感知、计算、通讯、执行能力的机器人所组成的系统,系统中的各机器人通过与其他机器人进行通讯与协作完成系统整体任务目标。相比于单个复杂机器人系统,多机器人系统可以通过简单的机器人结构和分工协作来降低系统建设和维护成本。并且,通过多个机器人之间的协作,系统具有更强的鲁棒性和稳定性,能够应对单个机器人故障或环境变化的影响。在多机器人系统应用过程中需要特别关注的问题是机器人的一致性,如在大规模货物运输任务中,需要保证机器人之间的动作执行的一致性,以避免碰撞或者重复工作,在灾难场所应急搜索救援等任务中,多机器人系统需要保持位置或姿态等变量的一致性,以提高搜救效率。
2、多机器人系统通过机器人之间连续的控制信号、状态变量及输出变量的交互,可以保障机器人的一致性协同作业。然而,机器人之间进行内部控制变量或状态变量的交互增加了数据被窃取、篡改的风险,对于高数据隐私需求的多机器人系统,避免交互机器人内部数据,利用输出信号实现系统分散式协同控制是亟需解决的问题。此外,对于采用电池供电的移动机器人系统,连续的通讯将造成高通讯能耗,降低机器人的工作时间。设计低频次通讯机制对于通讯能耗受限的移动机器人,能够提高系统通讯资源利用率与协同作业工作效率。
技术实现思路
1、为了解决现有技术中的问题,本发明提供了一种多机器人分散式事件触发一致性混杂控制系统及方法;通过降低传感器通信网络的信号发送频率,利用补偿器实现系统的分散式控制信号计算,实现多机器人系统的领航-跟随一致性。
2、本发明采用的技术方案如下:
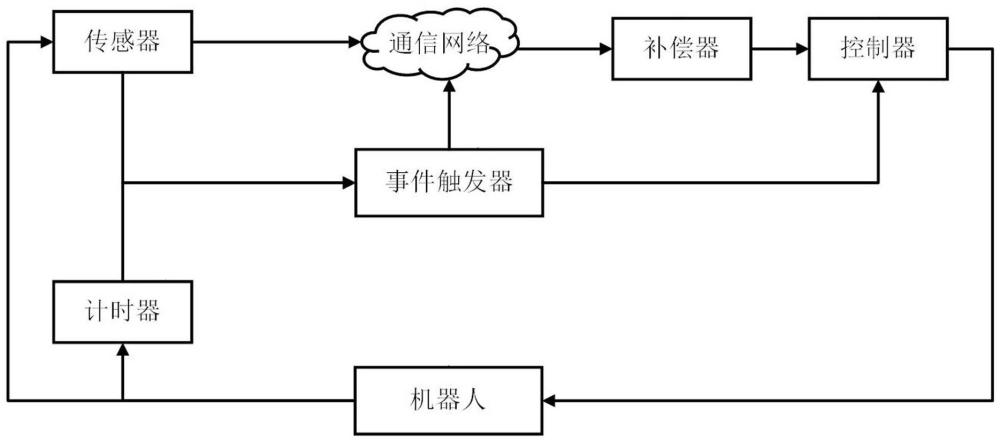
3、一种多机器人分散式事件触发一致性混杂控制系统,包括:
4、传感器模块,用于检测机器人与其邻居机器人的相对位置信息;
5、计时器模块,用于记录机器人的运行时间信息;
6、事件触发器模块,用于根据传感器模块的检测结果与计时器模块的记录结果判断是否发送最新的相对位置信息至补偿器模块,同时向控制器模块发送事件触发标志信号;
7、补偿器模块,用于根据接收到的相对位置信息计算补偿信号,并发送给控制器模块;
8、控制器模块,用于根据补偿器模块的计算结果计算混杂控制率,并根据事件触发标志信号切换连续控制率与跳变控制率施加于机器人。
9、进一步地,所述事件触发器模块根据传感器模块的输出信号变化与计时器模块的输出信号变化判断是否触发;其中,事件触发器模块在一次触发后记录传感器模块的输出信号与计时器模块的输出信号,将最新的传感器模块输出信号发送到补偿器模块,并将触发标志信号设定为1发送到控制器模块;在不满足触发条件的情况下,将触发标志信号设定为0发送到控制器模块。
10、进一步地,所述事件触发器模块的下一次触发条件为:实际传感器模块的输出与事件触发器模块记录的传感器模块输出的差值的绝对值大于等于第一阈值,或实际计时器模块的输出与事件触发器模块记录的计时器模块的输出的差值大于等于第二阈值。
11、进一步地,所述补偿器模块根据接收到的传感器模块的输出信号、多机器人系统的通讯拓扑有向图伴随矩阵、以及领航机器人的状态矩阵和输出矩阵,计算补偿信号下发至控制器模块。
12、进一步地,所述控制器模块采用混杂控制结构,利用补偿器模块的输出信息,在事件触发时刻与事件触发间隔区间内分别采用跳变控制率与连续控制率计算控制信号;控制器模块由嵌入式混杂内模、混杂观测器及镇定器三部分组成;混杂内模用于生成内模信号,混杂观测器用于观测混杂内模作用下的误差系统的未知状态变量信息,镇定器用于根据观测到的状态变量信息计算镇定信号;控制器模块结合补偿器模块、内模与镇定器的输出值,生成控制信号作用于机器人。
13、进一步地,所述控制器模块根据接收到的事件触发标志值切换控制率,当事件触发标志值为1时,选择跳变控制率计算控制信号并将控制信号作用于机器人;当事件触发标志值为0时,选择连续控制率计算控制信号作用于机器人。
14、一种多机器人分散式事件触发一致性混杂控制方法,应用于上述的多机器人分散式事件触发一致性混杂控制系统;所述方法包括以下步骤:
15、步骤1:通过传感器模块测量机器人与其邻居机器人的相对位置信息,并发送给事件触发器模块;
16、步骤2:通过计时器模块向事件触发器模块发送机器人的运行时间信息;
17、步骤3:事件触发器模块根据传感器模块的检测结果与计时器模块的记录结果判断是否发送最新的相对位置信息至补偿器模块,同时向控制器模块发送事件触发标志信号;
18、步骤4:补偿器模块根据接收到的相对位置信息计算补偿信号,并发送给控制器模块;
19、步骤5:控制器模块根据补偿器模块的计算结果计算混杂控制率,并根据事件触发标志信号切换连续控制率与跳变控制率施加于机器人。
20、进一步地,所述步骤3中,所述事件触发器模块保存上一次触发时传感器模块的输出值与计时器模块的输出值,判断传感器模块当前的输出值与事件触发器模块记录的上一次触发时刻传感器的输出值的差值的绝对值是否大于等于第一阈值,或判断计时器模块当前输出值与上一次触发时刻计时器模块输出值的差值是否大于等于第二阈值;如是,则向补偿器模块发送当前传感器模块的输出值,并向控制器模块发送事件触发标志值1;如不是,则向控制器模块发送触发标志值0。
21、进一步地,所述步骤4中,所述补偿器模块根据接收到的传感器模块的输出信号、多机器人系统的通讯拓扑有向图伴随矩阵、以及领航机器人的状态矩阵和输出矩阵,计算补偿信号发送至控制器模块。
22、进一步地,所述步骤5中,所述控制器模块根据接收到的事件触发标志值切换控制率,当事件触发标志值为1时,选择跳变控制率计算控制信号并将控制信号作用于机器人;当事件触发标志值为0时,选择连续控制率计算控制信号作用于机器人。
23、本发明的有益效果及优点是:本发明不依赖机器人的绝对位置信息,只需要机器人与邻居的相对位置信息,在机器人集群系统处于弱定位环境下依然可以实现系统的一致性。本发明通过补偿器,为机器人单体提供虚拟参考信号,实现控制信号的分散式计算,即机器人控制器计算过程中不需要邻居机器人的内部控制信号或状态变量信息,减小了机器人之间的信息交互数据量,提高数据隐私性。此外,通过事件触发机制作用于通信网络,降低机器人传感器向控制器的信息传输频率。
技术特征:1.一种多机器人分散式事件触发一致性混杂控制系统,其特征在于,包括:
2.根据权利要求1所述的多机器人分散式事件触发一致性混杂控制系统,其特征在于,所述事件触发器模块根据传感器模块的输出信号变化与计时器模块的输出信号变化判断是否触发;其中,事件触发器模块在一次触发后记录传感器模块的输出信号与计时器模块的输出信号,将最新的传感器模块输出信号发送到补偿器模块,并将触发标志信号设定为1发送到控制器模块;在不满足触发条件的情况下,将触发标志信号设定为0发送到控制器模块。
3.根据权利要求2所述的多机器人分散式事件触发一致性混杂控制系统,其特征在于,所述事件触发器模块的下一次触发条件为:实际传感器模块的输出与事件触发器模块记录的传感器模块输出的差值的绝对值大于等于第一阈值,或实际计时器模块的输出与事件触发器模块记录的计时器模块的输出的差值大于等于第二阈值。
4.根据权利要求1所述的多机器人分散式事件触发一致性混杂控制系统,其特征在于,所述补偿器模块根据接收到的传感器模块的输出信号、多机器人系统的通讯拓扑有向图伴随矩阵、以及领航机器人的状态矩阵和输出矩阵,计算补偿信号下发至控制器模块。
5.根据权利要求1所述的多机器人分散式事件触发一致性混杂控制系统,其特征在于,所述控制器模块采用混杂控制结构,利用补偿器模块的输出信息,在事件触发时刻与事件触发间隔区间内分别采用跳变控制率与连续控制率计算控制信号;控制器模块由嵌入式混杂内模、混杂观测器及镇定器三部分组成;混杂内模用于生成内模信号,混杂观测器用于观测混杂内模作用下的误差系统的未知状态变量信息,镇定器用于根据观测到的状态变量信息计算镇定信号;控制器模块结合补偿器模块、内模与镇定器的输出值,生成控制信号作用于机器人。
6.根据权利要求1所述的多机器人分散式事件触发一致性混杂控制系统,其特征在于,所述控制器模块根据接收到的事件触发标志值切换控制率,当事件触发标志值为1时,选择跳变控制率计算控制信号并将控制信号作用于机器人;当事件触发标志值为0时,选择连续控制率计算控制信号作用于机器人。
7.一种多机器人分散式事件触发一致性混杂控制方法,其特征在于,应用于权利要求1所述的多机器人分散式事件触发一致性混杂控制系统;所述方法包括以下步骤:
8.根据权利要求7所述的多机器人分散式事件触发一致性混杂控制方法,其特征在于,所述步骤3中,所述事件触发器模块保存上一次触发时传感器模块的输出值与计时器模块的输出值,判断传感器模块当前的输出值与事件触发器模块记录的上一次触发时刻传感器的输出值的差值的绝对值是否大于等于第一阈值,或判断计时器模块当前输出值与上一次触发时刻计时器模块输出值的差值是否大于等于第二阈值;如是,则向补偿器模块发送当前传感器模块的输出值,并向控制器模块发送事件触发标志值1;如不是,则向控制器模块发送触发标志值0。
9.根据权利要求7所述的多机器人分散式事件触发一致性混杂控制方法,其特征在于,所述步骤4中,所述补偿器模块根据接收到的传感器模块的输出信号、多机器人系统的通讯拓扑有向图伴随矩阵、以及领航机器人的状态矩阵和输出矩阵,计算补偿信号发送至控制器模块。
10.根据权利要求7所述的多机器人分散式事件触发一致性混杂控制方法,其特征在于,所述步骤5中,所述控制器模块根据接收到的事件触发标志值切换控制率,当事件触发标志值为1时,选择跳变控制率计算控制信号并将控制信号作用于机器人;当事件触发标志值为0时,选择连续控制率计算控制信号作用于机器人。
技术总结本发明公开了一种多机器人分散式事件触发一致性混杂控制系统及方法;本发明利用传感器测量机器人与邻居机器人的相对位置信息,通过判断事件触发条件是否得满足,决定传感器是否向补偿器发送测量信号;补偿器根据接收到的测量信号计算补偿信号,为控制器计算提供参考信息;控制器根据混杂控制算法求解满足系统性能要求的控制信号,并根据是否发生事件触发切换混杂控制率。本发明不依赖机器人的绝对位置信息,在分散式计算的约束下保证机器人的领航‑跟随一致性,适用于在深海、隧道等弱定位环境下工作的多机器人系统,同时事件触发机制的引入减小了机器人的通讯能耗,对于采用电池独立供电的机器人系统,可以增加其运行时间。技术研发人员:庄文秀,宋伟,李沐蓉,伍光宇受保护的技术使用者:之江实验室技术研发日:技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/311896.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。