一种垃圾池渗沥液格栅板清透装置的制作方法
- 国知局
- 2024-10-09 16:17:24
本技术涉及城市垃圾处理,特别是涉及一种垃圾池渗沥液格栅板清透装置。
背景技术:
1、垃圾焚烧电厂为城市生活垃圾的处理提供了新的方法,可实现垃圾的无害化、资源化、减量化。垃圾焚烧电厂在焚烧前,通常会将城市垃圾存放到电厂储存垃圾的垃圾存储池中。由于垃圾中的厨余垃圾占比40%~50%(重量比),通常占垃圾总量的10%~20%(重量比),导致城市垃圾中的渗沥液产生量非常高。为此,垃圾焚烧电厂通常会在垃圾存储池的坑底挖设渗沥液沟,然后在渗沥液沟的侧壁上设置渗沥液流出出口,出口处安装格栅板阻挡垃圾。实际使用过程中发现,由于垃圾直接与格栅板由于接触,垃圾很容易堵塞格栅板孔,导致渗沥液流出不畅,并且格栅板处渗沥液流出出口高度低于垃圾的堆积高度,出口处出于垃圾填埋状态,也会造成格栅板的堵塞。因此需要人工经常疏通渗滤液格栅板,但人工疏通不仅效率低下、清透效果不理想,而且垃圾存储池内的垃圾堆积容易产生甲烷、硫化氢、氨气等爆炸性有毒气体物质,并带有强烈恶臭,让身临其中的人产生恶心、头晕等症状,这对疏通人员的安全和健康也构成了巨大的隐患。
技术实现思路
1、本实用新型的目的是解决上述技术问题,提供一种垃圾池渗沥液格栅板清透装置,采用机械化控制,可以避免有毒有害物质对人的侵害,且作业灵活,作业面积大。
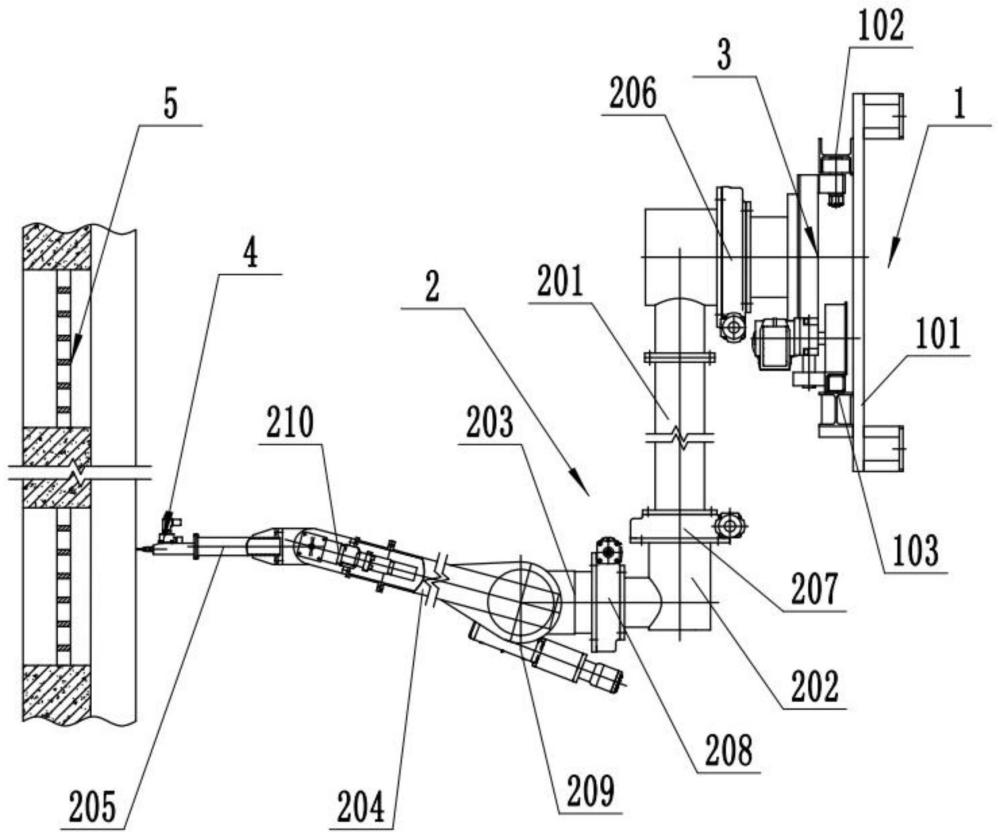
2、为实现上述目的,本实用新型提供了如下方案:本实用新型公开了一种垃圾池渗沥液格栅板清透装置,包括悬置的行走轨道、能够沿所述行走轨道移动的多自由度机械臂以及安装在所述多自由度机械臂的末端的高压水枪,所述行走轨道沿水平方向延伸,所述行走轨道的延伸方向平行于垃圾池的渗沥液格栅板。
3、优选地,所述多自由度机械臂通过行走小车行走在所述行走轨道上。
4、优选地,所述行走轨道包括上下分布的工字型钢轨和方形钢轨,所述行走小车的顶端设有位于所述工字型钢轨两个翼缘板之间的第一行走轮,所述行走小车的底端设有第二行走轮和第三行走轮,所述第二行走轮和第三行走轮分别贴合在所述方形钢轨的顶面和所述顶面相邻的侧面上,所述行走小车上设有驱动所述第二行走轮转动的行走驱动机构。
5、优选地,所述行走驱动机构包括行走驱动马达,所述行走驱动马达通过驱动减速器与所述第二行走轮连接。
6、优选地,所述行走轨道包括悬置安装架,所述工字型钢轨和方形钢轨固定连接在所述悬置安装架上。
7、优选地,所述多自由度机械臂包括由首端至末端依次设置的机械一臂、机械二臂、机械三臂、机械四臂以及机械五臂,所述机械一臂通过一臂回转机构转动连接在所述行走小车上,所述一臂回转机构的转动轴线水平垂直于所述行走轨道的延伸方向,所述机械二臂通过二臂回转机构转动连接在所述机械一臂上,所述二臂回转机构的转动轴线与所述机械一臂的轴线同轴,所述机械三臂通过三臂回转机构转动连接在所述机械二臂上,所述三臂回转机构的转动轴线与所述机械二臂的轴线同轴,所述机械四臂通过四臂摆动机构转动连接在所述机械三臂上,所述四臂摆动机构的摆动轴线水平垂直于所述机械三臂的轴线,所述机械五臂通过五臂摆动机构转动连接在所述机械四臂上,所述五臂摆动机构的摆动轴线与所述四臂摆动机构的摆动轴线同向,所述高压水枪安装在所述机械五臂上。
8、优选地,所述高压水枪和所述机械五臂同轴设置。
9、优选地,所述一臂回转机构包括一臂驱动马达、一臂主动齿轮以及与所述一臂主动齿轮啮合的一臂从动齿轮,所述一臂驱动马达固定连接在所述行走小车上,所述一臂主动齿轮与一臂驱动马达的输出轴固定连接,所述一臂从动齿轮转动连接在所述行走小车上,所述一臂从动齿轮的转动轴线水平垂直于所述行走轨道的延伸方向,所述一臂从动齿轮与所述机械一臂固定连接,所述机械一臂的轴线垂直于所述一臂从动齿轮的转动轴线,所述一臂主动齿轮的轮径小于所述一臂从动齿轮;
10、所述二臂回转机构包括二臂驱动马达、二臂主动齿轮以及与所述二臂主动齿轮啮合的二臂从动齿轮,所述二臂驱动马达固定连接在所述机械一臂上,所述二臂主动齿轮与所述二臂驱动马达的输出轴固定连接,所述二臂从动齿轮同轴转动连接在所述机械一臂的另一端,所述机械二臂的一端与所述二臂从动齿轮同轴固定连接,所述二臂主动齿轮的轮径小于所述二臂从动齿轮;
11、所述三臂回转机构包括三臂驱动马达、三臂主动齿轮以及与所述三臂主动齿轮啮合的三臂从动齿轮,所述三臂驱动马达固定连接在所述机械二臂上,所述三臂主动齿轮与所述三臂驱动马达的输出轴固定连接,所述三臂从动齿轮转动连接在所述机械二臂的另一端,所述三臂主动齿轮的轮径小于所述三臂从动齿轮的轮径,所述机械三臂与所述三臂从动齿轮同轴固定连接。
12、优选地,所述四臂摆动机构包括蜗轮蜗杆、行星减速机以及四臂驱动马达,所述四臂驱动马达固定连接在所述机械三臂上,所述四臂驱动马达通过所述行星减速机与所述蜗轮蜗杆的蜗杆同轴固定连接,所述蜗轮蜗杆的涡轮与所述机械四臂的一端固定连接,所述蜗轮蜗杆的涡轮的水平轴线垂直于所述机械四臂的轴线。
13、优选地,所述五臂摆动机构包括驱动轴、直角减速机以及五臂驱动马达,所述机械五臂通过所述驱动轴转动连接在所述机械四臂上,所述驱动轴的轴线水平垂直所述机械四臂的轴线,所述五臂驱动马达固定连接在所述机械四臂上,所述五臂驱动马达通过直角减速机驱动所述驱动轴转动。
14、本实用新型相对于现有技术取得了以下技术效果:
15、本实用新型的垃圾池渗沥液格栅板清透装置,采用机械化控制,可以避免有毒有害物质对人的侵害,而且通过多自由度机械臂和行走轨道配合控制高压喷头,作业灵活,作业面积大,可清理多层高度、多排长度排列的渗沥液格栅。
技术特征:1.一种垃圾池渗沥液格栅板清透装置,其特征在于,包括悬置的行走轨道、能够沿所述行走轨道移动的多自由度机械臂以及安装在所述多自由度机械臂的末端的高压水枪,所述行走轨道沿水平方向延伸,所述行走轨道的延伸方向平行于垃圾池的渗沥液格栅板。
2.根据权利要求1所述的一种垃圾池渗沥液格栅板清透装置,其特征在于,所述多自由度机械臂通过行走小车行走在所述行走轨道上。
3.根据权利要求2所述的一种垃圾池渗沥液格栅板清透装置,其特征在于,所述行走轨道包括上下分布的工字型钢轨和方形钢轨,所述行走小车的顶端设有位于所述工字型钢轨两个翼缘板之间的第一行走轮,所述行走小车的底端设有第二行走轮和第三行走轮,所述第二行走轮和第三行走轮分别贴合在所述方形钢轨的顶面和所述顶面相邻的侧面上,所述行走小车上设有驱动所述第二行走轮转动的行走驱动机构。
4.根据权利要求3所述的一种垃圾池渗沥液格栅板清透装置,其特征在于,所述行走驱动机构包括行走驱动马达,所述行走驱动马达通过驱动减速器与所述第二行走轮连接。
5.根据权利要求3所述的一种垃圾池渗沥液格栅板清透装置,其特征在于,所述行走轨道包括悬置安装架,所述工字型钢轨和方形钢轨固定连接在所述悬置安装架上。
6.根据权利要求2所述的一种垃圾池渗沥液格栅板清透装置,其特征在于,所述多自由度机械臂包括由首端至末端依次设置的机械一臂、机械二臂、机械三臂、机械四臂以及机械五臂,所述机械一臂通过一臂回转机构转动连接在所述行走小车上,所述一臂回转机构的转动轴线水平垂直于所述行走轨道的延伸方向,所述机械二臂通过二臂回转机构转动连接在所述机械一臂上,所述二臂回转机构的转动轴线与所述机械一臂的轴线同轴,所述机械三臂通过三臂回转机构转动连接在所述机械二臂上,所述三臂回转机构的转动轴线与所述机械二臂的轴线同轴,所述机械四臂通过四臂摆动机构转动连接在所述机械三臂上,所述四臂摆动机构的摆动轴线水平垂直于所述机械三臂的轴线,所述机械五臂通过五臂摆动机构转动连接在所述机械四臂上,所述五臂摆动机构的摆动轴线与所述四臂摆动机构的摆动轴线同向,所述高压水枪安装在所述机械五臂上。
7.根据权利要求6所述的一种垃圾池渗沥液格栅板清透装置,其特征在于,所述高压水枪和所述机械五臂同轴设置。
8.根据权利要求6所述的一种垃圾池渗沥液格栅板清透装置,其特征在于,所述一臂回转机构包括一臂驱动马达、一臂主动齿轮以及与所述一臂主动齿轮啮合的一臂从动齿轮,所述一臂驱动马达固定连接在所述行走小车上,所述一臂主动齿轮与一臂驱动马达的输出轴固定连接,所述一臂从动齿轮转动连接在所述行走小车上,所述一臂从动齿轮的转动轴线水平垂直于所述行走轨道的延伸方向,所述一臂从动齿轮与所述机械一臂固定连接,所述机械一臂的轴线垂直于所述一臂从动齿轮的转动轴线,所述一臂主动齿轮的轮径小于所述一臂从动齿轮;
9.根据权利要求6所述的一种垃圾池渗沥液格栅板清透装置,其特征在于,所述四臂摆动机构包括蜗轮蜗杆、行星减速机以及四臂驱动马达,所述四臂驱动马达固定连接在所述机械三臂上,所述四臂驱动马达通过所述行星减速机与所述蜗轮蜗杆的蜗杆同轴固定连接,所述蜗轮蜗杆的涡轮与所述机械四臂的一端固定连接,所述蜗轮蜗杆的涡轮的水平轴线垂直于所述机械四臂的轴线。
10.根据权利要求6所述的一种垃圾池渗沥液格栅板清透装置,其特征在于,所述五臂摆动机构包括驱动轴、直角减速机以及五臂驱动马达,所述机械五臂通过所述驱动轴转动连接在所述机械四臂上,所述驱动轴的轴线水平垂直所述机械四臂的轴线,所述五臂驱动马达固定连接在所述机械四臂上,所述五臂驱动马达通过直角减速机驱动所述驱动轴转动。
技术总结本技术公开了一种垃圾池渗沥液格栅板清透装置,属于城市垃圾处理技术领域,包括悬置的行走轨道、能够沿行走轨道移动的多自由度机械臂以及安装在多自由度机械臂的末端的高压水枪,行走轨道沿水平方向延伸,行走轨道的延伸方向平行于垃圾池的渗沥液格栅板。本技术的垃圾池渗沥液格栅板清透装置,采用机械化控制,可以避免有毒有害物质对人的侵害,而且通过多自由度机械臂和行走轨道配合控制高压喷头,作业灵活,作业面积大,可清理多层高度、多排长度排列的渗沥液格栅。技术研发人员:丛日旭,王俊明,展乾,庞旭坤,柴旭东,薛祥成,孟玲雨,杨玮玮受保护的技术使用者:哈尔滨科能熔敷科技股份有限公司技术研发日:20240204技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/312560.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表