多地形环境下无人机三维覆盖轨迹优化算法
- 国知局
- 2024-10-09 14:36:19
本发明属于无人机测绘领域,具体涉及一种多地形环境下无人机三维覆盖轨迹优化算法。
背景技术:
1、利用无人机进行航空摄影,特别是测绘和三维地形重建是目前无人机应用的一大重点方向。目前通用的蛇形无人机覆盖轨迹优化通常将不同的地形都视为平坦地形,将覆盖任务区域按照固定的图像重复率分解成搭载摄像机的无人机观测面积大小相当的若干矩形,并且无人机必须在穿过其中心的轨迹上方。整个所有的路径被存储为一个坐标列表,称为空中观测点集,无人机从一个空中观测点移动到下一个空中观测点,直到列表结束(如图2所示)。但是在面对凸起地形和凹陷地形交错出现的复杂地形时,蛇形无人机覆盖路径规划方法表现出一些明显的局限性和挑战,具体问题如下:(1)蛇形路径是基于平面区域设计的,没有考虑到地形的变化尤其是地形的起伏变化,无人机按照固定高度飞行可能导致无法覆盖到地形的顶部区域,或者在同一区域内覆盖过度,降低了覆盖效率并可能导致数据采集的不完整。(2)由于无人机与实际地形的距离在不断变化,不同高度拍摄的图像在拼接时可能出现错位或重叠,影响后续的图像处理和三维建模。(3)蛇形路径规划也没有充分考虑如何提高无人机工作效率,任务完成的效率较低。
技术实现思路
1、本发明的发明目的是提供一种多地形环境下无人机三维覆盖轨迹优化算法,解决了无人机在执行航空摄影任务时,特别是在多地形环境下,优化飞行轨迹以实现高效、精确的三维覆盖的技术问题。
2、为实现上述发明目的,本发明的技术方案如下:
3、一种多地形环境下无人机三维覆盖轨迹优化算法,包括如下步骤:
4、地图预处理与空中观测点集生成,包括对初始地图进行光滑曲面拟合,根据无人机搭载的摄像机的无人机运动成像方式和多地形摄影约束条件将待覆盖任务区域按照成像面积大小划分,并生成空中观测点集;
5、路径规划,包括将无人机遍历空中观测点的问题建模为tsp问题,在不考虑碰撞约束的前提下,使用蚁群算法来解决tsp问题,找到近似最优的路径;
6、路径重规划与优化,对初始路径进行碰撞检测,确保无人机在飞行过程中不会与地形或其他障碍物发生碰撞,对于可能发生碰撞的路径段,使用rrt算法进行局部路径重规划,以找到安全的飞行路径;对重规划后的路径进行平滑处理。
7、本发明介绍了一种针对单无人机区域覆盖路径规划的三阶段分步优化算法,该算法的核心目标是确保无人机在执行监测任务时能够采集到高质量的图像数据。通过深入分析无人机的运动成像特性和复杂地形的建模,算法能够准确地生成一系列高质量的空中观测点。这些观测点是无人机进行地面拍摄的预定位置,其精确性直接关系到最终图像数据的质量。其次,在路径优化方面,算法采用了旅行商问题(tsp问题)的模型,并通过蚁群算法来求解,有效地减少无人机的飞行距离,并提升任务执行的效率。本发明在第三阶段引入了碰撞检测机制,确保无人机在飞行过程中不会与地形障碍物发生碰撞。如果检测到潜在的碰撞风险,利用rrt算法对路径进行重规划,保障了任务的顺利完成。
8、在上述的多地形环境下无人机三维覆盖轨迹优化算法中,所述多地形摄影约束条件包括正射摄影、等距离摄影和多地形重叠率设置,
9、所述正射摄影要求无人机在每个空中拍摄点的相机方向必须垂直于地面,
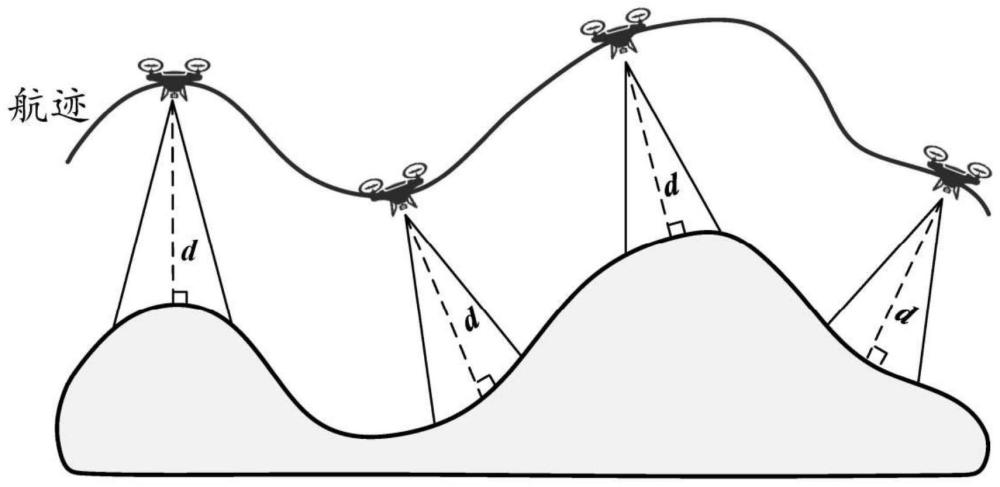
10、所述等距离摄影要求无人机与地面保持恒定的距离,
11、所述多地形重叠率设置要求根据地形分别设置相邻图像之间的重叠区域。
12、本发明提出了三个摄影约束条件,提高无人机采集图像数据的质量。
13、正射摄影要求无人机在每个空中拍摄点的相机方向必须垂直于地面。采用正射摄影的方式来对地面拍摄图像,在每个空中拍摄点,相机的方向都必须垂直于平滑的3d曲面以拍摄正射图像,避免无人机倾斜摄影,造成照片物体的畸变,确保从空中对地面进行拍摄时,所获得的图像具有高度的准确性和一致性,无需经过图像几何纠正和配准即可直接使用。
14、等距离摄影确保无人机与地面保持恒定的距离,以维持图像的一致分辨率。无人机在每个空中拍摄点的位置都需要与目标地表保持一个恒定的距离。这个距离的设定基于地面分辨率的要求,确保了所拍摄的图像在大小、清晰度和细节上具有一致性,从而在后续的图像拼接过程中,能够有效减少拼接误差,提高拼接的准确度和视觉效果。重叠率设置则要求相邻图像之间有一定的重叠区域,以便于图像拼接和三维模型的重建。
15、本发明在考虑如何满足特定的摄影约束条件下的最优飞行轨迹,例如图像重叠度、分辨率、拍摄角度等,以确保拍摄的图像质量满足后续处理的要求。针对不同类型的地形设计不同的算法,考虑了多地形环境下的特定需求,能够适应平坦、凸起和凹陷等多种地形,使得无人机在各种环境下都能够执行有效的区域覆盖任务。确保无人机能够根据地形变化灵活调整飞行路径和高度。
16、在上述的多地形环境下无人机三维覆盖轨迹优化算法中,所述多地形重叠率包括平坦地形重叠率、凸起地形重叠率和凹陷地形重叠率,所述凸起地形重叠率大于平坦地形重叠率,所述凹陷地形重叠率小于平坦地形重叠率。
17、发明人研究无人机拍摄图片的实际重叠率发现,在地势高处拍摄到的图像重叠率与地面拍摄的图像重叠率相比较低,这样采集回来的照片因为重复部分过少无法保证准确拼接,本发明通过提高凸起地形重叠率,从而缩小相邻拍摄点的距离。而在凹陷处拍摄的图像重叠率比平坦地面重叠率大,这样就会拍摄过多无用的图像,从而导致缩短无人机电池使用时间,降低无人机的飞行时间,既浪费无人机的能量又降低了无人机工作效率。本发明通过降低凹陷地形重叠率,增大在凹陷处相邻拍摄点的距离,从而提高无人机在有限的飞行时间拍摄更多图像的工作效率。
18、在上述的基于摄影约束条件下的多地形环境下无人机三维覆盖轨迹优化算法中,假设无人机距不同地形的飞行高度固定为h,凸起地形或凹陷地形至平坦地形处地面的绝对高度为h,摄像机视场角是α,平坦地形时摄像机相隔拍摄图像非重复部分是s,在平坦地面成像长度为l,所述平坦地形重叠率为w,凸起地形重叠率为w1,凹陷地形重叠率为w2,
19、所述平坦地形重叠率w计算公式如下,
20、
21、所述凸起地形重叠率w1计算公式如下,
22、
23、所述凹陷地形重叠率w2计算公式如下,
24、
25、在上述的多地形环境下无人机三维覆盖轨迹优化算法中,所述不同地形判定方式如下:
26、根据光滑曲面拟合后得到包含所有点高度的三维地形数据,获得地形平均高度并设定阈值,平均高度±阈值范围内视为平坦地形,大于此范围即为凸起地形,小于此范围即为凹陷地形。
27、基于三维地形数据可知每点的高度,对所有点的高度进行求和,除以点的个数即可得到地形平均高度。阈值的设定根据实际拍摄要求和地形特点进行设定。
28、在上述的多地形环境下无人机三维覆盖轨迹优化算法中,所述生成空中观测点集包括,
29、初始地图光滑曲面拟合后得到光滑三维地形表面,结合无人机搭载的摄像机的无人机运动成像方式和多地形摄影约束条件将任务区域分解成若干个无人机观测面积大小相当的长方形,长方形的中心代表拍摄图像中心,
30、假设光滑三维地形表面为s(x,y,z),所有划分的长方形区域中心点集表示为z(xs,ys,zs),每个中心点z存在一个垂直于表面的单位法向量,沿着固定距离d生成一个空中观测点k,那么所有的空中观测点组成了空中观测点集k(xk,yk,zk),
31、
32、式中i=1,2,3,…,n,j=1,2,3,…,m,代表该点的法向量,
33、根据该点法向量,得到空中观测点位置。
34、在上述的多地形环境下无人机三维覆盖轨迹优化算法中,所述无人机搭载的摄像机在每个空中观测点横摇角度p和俯仰角度t的计算公式分别如下:
35、
36、
37、本发明通过在无人机到达观测点后,调整自身姿态实现拍摄正射摄影,拍摄正射图像。
38、在上述的多地形环境下无人机三维覆盖轨迹优化算法中,所述路径规划包括,将每个空中观测点视作城市,将无人机视作旅行商,利用启发式算法蚁群算法在不考虑碰撞约束的前提下,通过多次迭代后得到一条无人机遍历所有空中观测点回到起点且总飞行距离最短的路线。
39、tsp问题的计算复杂性很高,属于np完全问题,这意味着没有已知的高效多项式时间算法能保证在所有情况下都能找到全局最优解。本发明使用算法蚁群算法解决tsp问题。运用蚁群算法解决旅行商问题时,其基本原理是将m只蚂蚁随机放在多个城市,让这些蚂蚁从所在的城市出发,遍历过所有城市之后返回到出发的城市。经过一次迭代之后比较每只蚂蚁走的路线,将最短的记录下来作为本次迭代最优解。每经过一次迭代之后更新信息素浓度,下一次迭代的蚂蚁根据变换后的信息素浓度重新选择最优路线。每次迭代之后都会和上一次迭代最优解进行比较,直到经过多次迭代后稳定在同一最优解,即为tsp问题的最短路程。
40、蚁群算法中计算第k只蚂蚁在第i座城市时,选择第j个城市的概率的公式如下
41、
42、其中,α是信息素重要程度因子,它反映了信息素对蚂蚁路径选择的权重,α越大,所占权重越大;β是启发函数重要程度因子,它反映了启发函数对蚂蚁路径选择的权重,β越大,所占权重越大;ηij是启发函数,代表由城市i到城市j的启发程度,表达式一般为城市i和j之间的距离的倒数;tabuk表示禁忌表,记录第k只蚂蚁当前已经走过的城市;τij代表城市i到城市j的路径之间的信息素数量。
43、蚁群算法中第k只蚂蚁走完所有城市留下的信息素计算公式如下
44、
45、其中,q代表信息素总量,信息素总量为蚂蚁迭代一次后通过所有城市后释放的信息素总量;lk代表第k只蚂蚁在这次迭代中走过的总路径长度。
46、蚁群算法中每完成一次迭代之后都要更新信息素,更新信息素公式如下
47、
48、其中,ρ是代表信息素挥发速度,由于蚂蚁释放的信息素会随着时间逐渐挥发,从而保证路径上的信息素不会无限递增。
49、由于蚁群算法在初始选择出发城市时具有随机性,在加入避障约束条件后,即当前所在的城市和下一个选择的城市要求之间的连线不可以和地形发生碰撞。实际发现由于山地的复杂性,往往无法顺利寻找到下一个满足碰撞约束的城市,这使得在蚁群算法在求解蚂蚁完整的路径总是失败的,大大影响了算法的效率。因此在用蚁群算法求取初始路径这一阶段中去掉避障约束条件,把这一约束加入到路径重规划阶段。
50、本发明将区域覆盖问题建模为tsp问题,并通过蚁群算法求解,蚁群算法是一种模拟自然界蚂蚁觅食行为的优化技术,它通过模拟蚂蚁在路径上释放信息素的方式来指导搜索过程。通过这种方式,无人机可以在有限的电池续航内完成更多的监测任务,显著提升了工作效率。
51、碰撞检测与避障是无人机安全飞行的关键,所述路径重规划包括,
52、根据遍历空中观测点顺序把初始路径分成若干初始路径段,对多条初始路径段依次进行碰撞检测,
53、若没有发生碰撞,当前路径段加入到最终路径集合,
54、若发生了碰撞,对当前路径段进行重新规划,把此路径段的第一个点和最后一个点当作重规划路径段的起点和终点,利用rrt算法对此路径段进行规划,并把采样空间从整个地图缩小到当前起点和终点所形成的空间,采用小步长进行空间探索,输出当前规划好的路径段后,将规划好的无碰撞路径段加入到最终路径集合,
55、继续对后续初始路径段进行碰撞检测,重复上述流程,直至初始路径重新规划完成。
56、本发明的设计巧妙地结合了全局搜索和局部搜索的优势。蚁群算法在全局层面上优化路径,而rrt算法则在局部层面上进行精细调整。这种结合不仅能够在保证路径全局最优的同时,解决局部可能存在的碰撞问题,还能够在面对复杂环境时快速适应和调整。
57、在上述的多地形环境下无人机三维覆盖轨迹优化算法中,所述对重规划后的路径进行平滑处理包括,利用多次b样条曲线对重规划路径进行路径平滑,得到可实际飞行路径。
58、本发明提供了一种综合考虑地形适应性、摄影约束条件、路径优化、碰撞检测和路径平滑处理的多阶段优化算法,旨在为无人机在多地形环境下的区域覆盖任务提供一条高效、安全且精确的飞行路径。应用于测绘、生态环境监测以及三维地形重建等领域外出作业的无人机航空摄影。
59、与现有技术相比,本发明的有益效果体现在:
60、(1)本发明提供了一种针对单无人机区域覆盖路径规划的三阶段分步优化算法,通过实施正射摄影和等距离摄影约束,算法确保了无人机在不同地形条件下拍摄的图像具有更高的精度和一致性,减少了图像畸变,提高了后续图像处理和分析的质量;考虑了多地形环境下的特定需求,能够适应起伏多变的地形,使得无人机在各种环境下都能够执行有效的区域覆盖任务;本发明将区域覆盖问题建模为tsp问题,并通过蚁群算法求解,算法能够在复杂地形中找到最短或接近最短的飞行路径,从而减少飞行时间和能耗,提高作业效率。
61、(2)本发明最优飞行轨迹的设定充分考虑了摄影约束条件,包括正射摄影、等距离摄影约束和多地形重叠率,确保了无人机在不同地形条件下拍摄的图像具有更高的精度和一致性,减少了图像畸变,提高了后续图像处理和分析的质量。
62、(3)本发明对初始地图进行光滑曲面拟合,以适应不同的地形特征,通过多地形重叠率的摄影约束,针对不同地形(平坦、凸起、凹陷)调整摄影重叠率,使算法能够适应多变的地理环境,确保无人机能够根据地形变化灵活调整飞行路径和高度,使得无人机能够在各种不同的地形条件下都能确保覆盖效率,高效地完成任务。
63、(4)本发明采用了旅行商问题模型,并通过蚁群算法来求解。在无人机路径规划的背景下,有效地减少无人机的飞行距离,提高能源的使用效率,延长飞行时间,并提升任务执行的效率。通过这种方式,无人机可以在有限的电池续航内完成更多的监测任务,显著提升了工作效率。
64、(5)本发明为了提升算法的效率,在用蚁群算法求取初始路径这一阶段中去掉避障约束条件,把这一约束加入到路径重规划阶段。
65、(6)本发明的设计巧妙地结合了全局搜索和局部搜索的优势。蚁群算法在全局层面上优化路径,而rrt算法则在局部层面上进行精细调整。这种结合不仅能够在保证路径全局最优的同时,解决局部可能存在的碰撞问题,还能够在面对复杂环境时快速适应和调整。
66、(7)本发明提供了一种综合考虑地形适应性、摄影约束条件、路径优化、碰撞检测和路径平滑处理的多阶段优化算法,旨在为无人机在多地形环境下的区域覆盖任务提供一条高效、安全且精确的飞行路径。应用于测绘、生态环境监测以及三维地形重建等领域外出作业的无人机航空摄影。
本文地址:https://www.jishuxx.com/zhuanli/20241009/305823.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表