基于折纸原理的机器人及其控制方法、控制器和存储介质
- 国知局
- 2024-10-09 15:11:04
本申请涉及折纸机器人,尤其涉及一种基于折纸原理的机器人及其控制方法、控制器和存储介质。
背景技术:
1、随着科技高速发展,机器人技术已经应用于各种生活场景,给人们的生活带来了极大的便利,目前使用较多的是轮式机器人以及旋翼机器人。轮式机器人能够良好适应平坦地形,具有稳定运动和高速移动的能力;旋翼机器人能够适应空中飞行的状态,具有空中勘测等功能。
2、因此,为了让机器人能够适应更多的应用场景,充分发挥二者的优势,将轮式机器人和旋翼机器人进行结合,实现两种机器人运动模式的自由切换以及多功能性,是十分有必要的。相关技术中,通过在旋翼机器人上增加被动轮的方式来对轮式机器人和旋翼机器人的运动功能结构进行简单组合,这样的做法不仅增加了机器人的体积,还会影响飞行的稳定性,不能充分发挥既有轮式机器人和旋翼机器人的优势;或者通过引入多个自由度的方法来增加机器人运动模式,引入多个自由度控制的方法增加了控制算法的复杂性,两种方法都不能够实现机器人滚轮形态和旋翼形态的完全切换,也不能够实现在相应形态下的运动模式互相独立。
技术实现思路
1、本申请实施例的主要目的在于提出一种基于折纸原理的机器人及其控制方法、控制器和存储介质。
2、为实现上述目的,本申请实施例的第一方面提出了一种基于折纸原理的机器人,所述机器人包括:
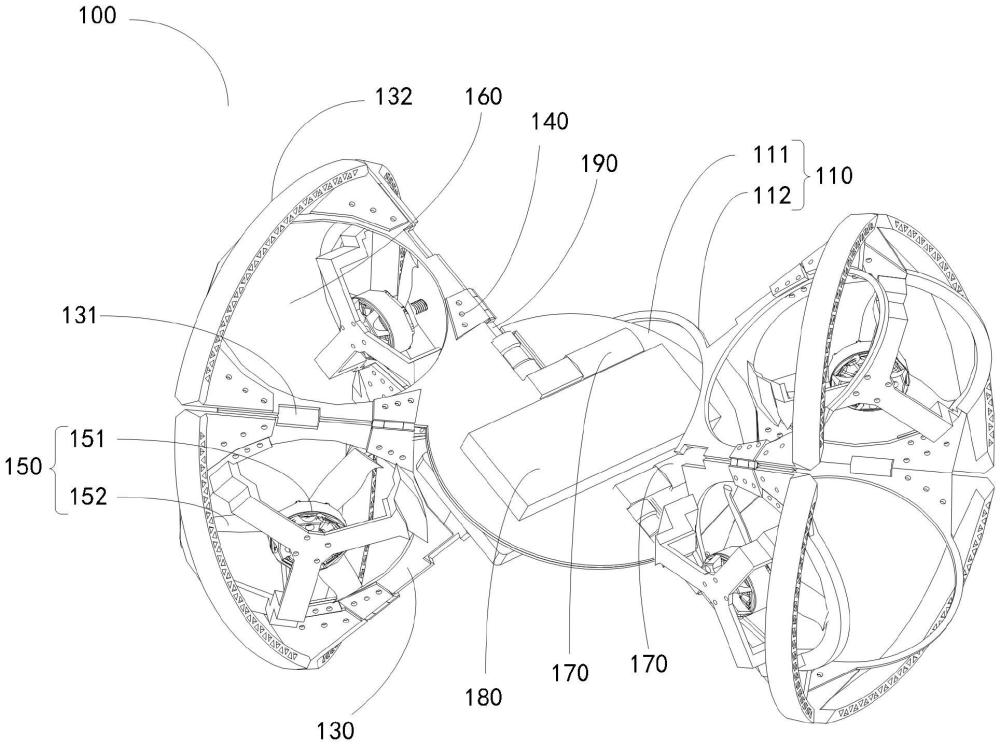
3、连杆部件、中央面板和多个扇形面板;
4、所述连杆部件的两端连接数量相同的所述扇形面板,每位置相邻的两个所述扇形面板通过连接元件连接;
5、所述中央面板位于连杆部件的中部,所述中央面板用于放置控制组件,所述控制组件包括折展电机、运动控制系统;
6、所述折展电机用于驱动所述连接元件,以控制所述机器人进入旋翼形态或滚轮形态,其中,所述旋翼形态是指每一端的所述扇形面板处于成对重叠的状态,所述滚轮形态是指每一端的所述扇形面板处于成对展开的状态;
7、所述运动控制系统用于控制所述机器人在所述旋翼形态下进入飞行模式,或控制所述机器人在所述滚轮形态下进入滚动模式。
8、根据本发明实施例的第一方面提供的机器人,至少具有如下有益效果:基于单自由度的折纸结构设计的机器人,能够通过单自由度上的折叠和展开运动实现机器人的旋翼形态和滚动形态的完全切换,并在机器人的旋翼形态下进入飞行模式,在机器人的滚轮形态下进入滚轮模式,两种运动模式互相独立。
9、在一些实施例,每个所述扇形面板均开设有通孔,每一端的至少一个所述扇形面板的所述通孔内安装旋翼部件,所述旋翼部件包括旋翼电机和桨叶,在所述飞行模式下,所述旋翼电机驱动所述桨叶转动。
10、在一些实施例,每位置相邻的两个所述扇形面板中的一个所述通孔内安装旋翼部件。
11、在一些实施例,所述扇形面板远离所述中央面板的一侧安装圆弧形支撑部件。
12、在一些实施例,为每个所述连接元件在位置相邻的两个所述扇形面板上镜像开设空槽,且在所述成对重叠状态下,所述空槽用于放置处于镜像的所述连接元件。
13、为实现上述目的,本申请实施例的第二方面提出了一种机器人的运动控制方法,所述运动控制方法包括:
14、通过所述折展电机,驱动所述连接元件,以控制所述机器人进入旋翼形态或滚轮形态,其中,所述旋翼形态是指每一端的所述扇形面板处于成对重叠的状态,所述滚轮形态是指每一端的所述扇形面板处于成对展开的状态;
15、在所述旋翼形态下,通过所述运动控制系统,控制所述机器人在所述旋翼形态下进入飞行模式;
16、在所述滚轮形态下,通过所述运动控制系统,控制所述机器人在所述滚轮形态下进入滚动模式。
17、根据本发明的实施例第二方面提供的机器人的运动控制方法,至少具有如下有益效果:建立了实现机器人通过折展运动实现旋翼形态和滚轮形态切换的动力学模型,通过折展电机来驱动机器人折叠和展开,以实现旋翼形态和滚轮形态的完全切换,由运动控制系统来控制机器人进行飞行或滚动。
18、在一些实施例中,所述通过所述运动控制系统,控制所述机器人在所述旋翼形态下进入飞行模式,包括:
19、获取遥控器控制信息和地面站控制信息、以及获取所述机器人的状态监测信息;
20、基于所述遥控器控制信息和地面站控制信息和所述状态监测信息计算所述机器人的飞行运动信息;
21、将所述飞行运动信息传输至所述旋翼电机,由所述旋翼电机驱动机器人基于所述飞行运动信息进行飞行。
22、在一些实施例中,所述通过所述运动控制系统,控制所述机器人在所述滚轮形态下进入滚动模式,包括:
23、获取遥控器控制信息和地面站控制信息、以及获取所述机器人的状态监测信息;
24、基于所述遥控器控制信息和地面站控制信息和所述状态监测信息计算所述机器人的滚动运动信息;
25、将所述滚动运动信息传输至所述旋翼电机,由所述旋翼电机驱动机器人基于所述滚动运动信息进行滚动。
26、为实现上述目的,本申请实施例的第三方面提出了一种控制器,所述控制器包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第二方面所述的运动控制方法。
27、为实现上述目的,本申请实施例的第四方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第二方面所述的运动控制方法。
28、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
技术特征:1.一种基于折纸原理的机器人,其特征在于,所述机器人包括:连杆部件、中央面板和多个扇形面板;
2.根据权利要求1所述的机器人,其特征在于,每个所述扇形面板均开设有通孔,每一端的至少一个所述扇形面板的所述通孔内安装旋翼部件,所述旋翼部件包括旋翼电机和桨叶,在所述飞行模式下,所述旋翼电机驱动所述桨叶转动。
3.根据权利要求2所述的机器人,其特征在于,每位置相邻的两个所述扇形面板中的一个所述通孔内安装旋翼部件。
4.根据权利要求1至3任一项所述的机器人,其特征在于,所述扇形面板远离所述中央面板的一侧安装圆弧形支撑部件。
5.根据权利要求1至3任一项所述的机器人,其特征在于,为每个所述连接元件在位置相邻的两个所述扇形面板上镜像开设空槽,且在所述成对重叠状态下,所述空槽用于放置处于镜像的所述连接元件。
6.一种运动控制方法,其特征在于,应用于如权利要求1至5任一项所述的基于折纸原理的机器人,所述运动控制方法包括:
7.根据权利要求6所述的运动控制方法,其特征在于,所述通过所述运动控制系统,控制所述机器人在所述旋翼形态下进入飞行模式,包括:
8.根据权利要求6所述的运动控制方法,其特征在于,所述通过所述运动控制系统,控制所述机器人在所述滚轮形态下进入滚动模式,包括:
9.一种控制器,其特征在于,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求6至8中任意一项所述的运动控制方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求6至8中任一项所述的运动控制方法。
技术总结本申请实施例提供了一种基于折纸原理的机器人及其控制方法、控制器和存储介质,属于折纸机器人技术领域。所述机器人的运动控制方法包括:通过折展电机,驱动连接元件,以控制所述机器人进入旋翼形态或滚轮形态,旋翼形态是指每一端的扇形面板处于成对重叠的状态,滚轮形态是指每一端的扇形面板处于成对展开的状态;在旋翼形态下,通过运动控制系统,控制机器人在旋翼形态下进入飞行模式;在滚轮形态下,通过运动控制系统,控制机器人在滚轮形态下进入滚动模式。本发明的机器人基于一种单自由度的折纸结构来实旋翼形态和滚轮形态的完全切换,并能够在旋翼形态下进行飞行,在滚轮形态下进行滚动。技术研发人员:冯慧娟,林江,邓力梓,苗仲祺,王伟豪受保护的技术使用者:南方科技大学技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/307967.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。