铁路接触线的点云数据的获取方法、存储介质及处理器与流程
- 国知局
- 2024-10-15 09:22:44
本发明涉及轨道交通检测,具体地涉及一种铁路接触线的点云数据的获取方法、存储介质及处理器。
背景技术:
1、铁路以其运输量大、速度快、运输成本低等优点得到快速发展,成为极其重要的运输方式。接触网系统作为铁路电气化工程的主框架,起到为电力机车供电的作用,是铁路系统的重要组成部分。接触网支柱、接触线分别是接触网系统的支持设备、供电设备,是接触网系统的关键部件,是接触网系统正常运转的重要保障。受电弓作为列车与接触网之间的双向传递枢纽具有极其重要的作用,为保证列车的正常运行,需要受电弓与接触线时刻保持良好接触,实现可靠受流。为避免出现“刮弓”或“钻弓”等情况,需定期对接触线的导高、拉出值进行检测,以排除隐患,使接触网悬挂处于良好的工作状态,因此实现高精度的接触线点云提取是精确计算接触线导高、拉出值的关键;然而,传统的人工检测方法不仅耗时,而且准确度较低。
技术实现思路
1、本发明实施例的目的是提供一种铁路接触线的点云数据的获取方法、存储介质及处理器,用以解决上述现有技术中存在的技术问题。
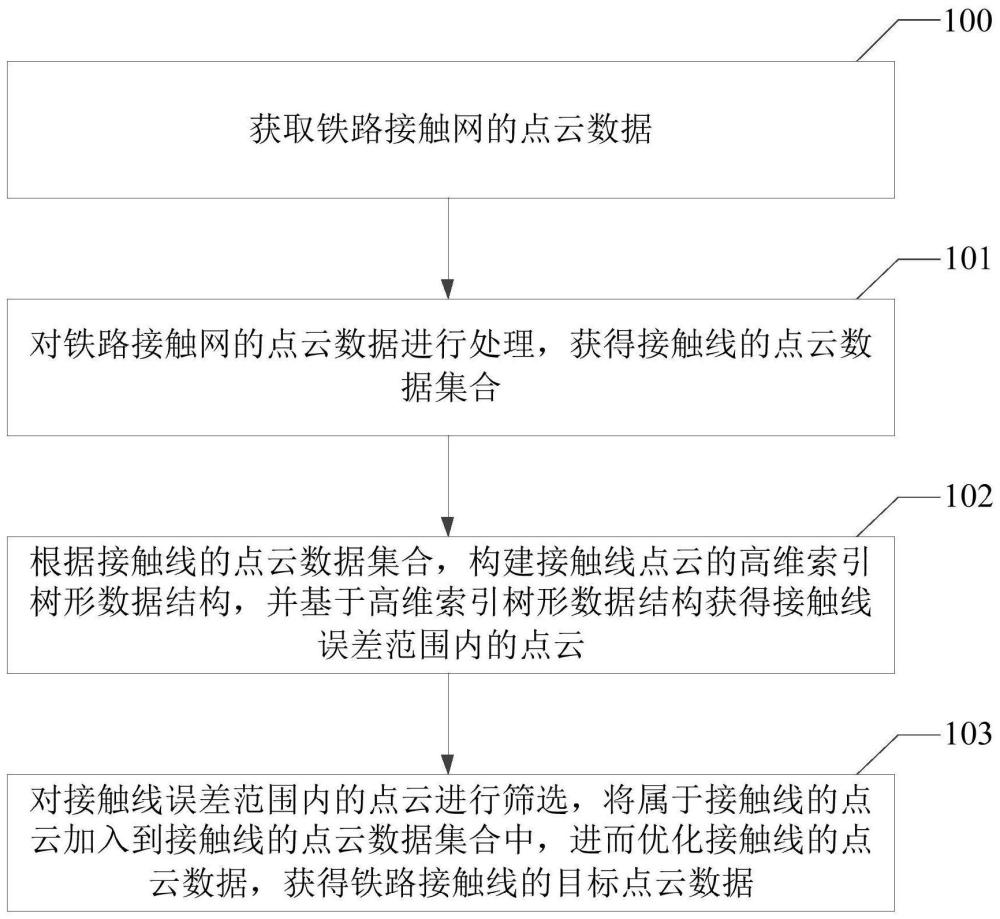
2、为了实现上述目的,本发明实施例提供一种铁路接触线的点云数据的获取方法,包括获取铁路接触网的点云数据;
3、对所述铁路接触网的点云数据进行处理,获得接触线的点云数据集合;
4、根据所述接触线的点云数据集合,构建接触线点云的高维索引树形数据结构,并基于所述高维索引树形数据结构获得接触线误差范围内的点云;
5、对所述接触线误差范围内的点云进行筛选,将属于所述接触线的点云加入到所述接触线的点云数据集合中,进而优化所述接触线的点云数据,获得所述铁路接触线的目标点云数据。
6、可选的,所述获取铁路接触网的点云数据,包括:
7、获取车载激光扫描系统中的铁路点云数据;
8、采用基于高程直方图阈值的方法对所述铁路点云数据进行分割,获得铁路接触网的初始点云数据;
9、采用统计滤波算法对所述铁路接触网的初始点云数据进行去噪处理,获得所述铁路接触网的点云数据。
10、可选的,所述采用基于高程直方图阈值的方法对所述铁路点云数据进行分割,获得铁路接触网的初始点云数据,包括:
11、将所述铁路点云数据按照一定的高程区间进行划分,得到基于高程变化的点云数量直方图;
12、根据接触网点云和铁轨点云高程、密度特征以及预定的点云数量阈值,确定高程分割阈值;
13、根据所述高程分割阈值,将所述铁路点云数据进行分割,获得所述铁路接触网的初始点云数据。
14、可选的,所述采用统计滤波算法对所述铁路接触网的初始点云数据进行去噪处理,获得所述铁路接触网的点云数据,包括:
15、构建所述铁路接触网的初始点云数据的高维索引树形数据结构;
16、计算每个激光脚点到与其最近的多个临近点的平均距离和第一距离阈值,其中,所述第一距离阈值为所述铁路接触网的初始点云数据的平均点间距及标准差之和;
17、判断所述平均距离是否大于所述第一距离阈值,若是则该激光脚点视为噪声点,并将其从所述铁路接触网的初始点云数据中去除,获得所述铁路接触网的点云数据。
18、可选的,所述对所述铁路接触网的点云数据进行处理,获得接触线的点云数据集合,包括:
19、对所述铁路接触网的点云数据进行栅格化处理,获得所述铁路接触线的点云数据在栅格中的连通区域;
20、遍历所述连通区域,计算所述栅格中所述点云数据的高程平均值,并将所述高程平均值作为阈值,通过判断所述点云数据的高程是否大于该阈值,若是,则将其视为非接触线点云数据并去除,以获得分段接触线点云数据;
21、对所述分段接触线点云数据分别进行基于ransac算法的直线拟合,获得目标拟合直线;
22、利用所述目标拟合直线找到与立柱相连的接触线点云,补全断裂位置的接触线,以获得所述接触线的点云数据集合。
23、可选的,所述对所述分段接触线点云数据分别进行基于ransac算法的直线拟合,获得目标拟合直线,包括:
24、从任意段接触线中选取两个激光脚点,并基于所述两个激光脚点确定直线;
25、分别计算该段接触线点云中任意点到所述直线的距离,并判断所述距离是否小于第二距离阈值,若是,则将该段接触线点云中任意点到所述直线的距离小于所述第二距离阈值的点视为所述直线的可靠点;
26、重复执行上述过程,并记录每次确定的直线的参数和可靠点的数量,将可靠点数量最多的直线作为所述目标拟合直线。
27、可选的,所述对所述铁路接触网的点云数据进行栅格化处理,获得所述铁路接触线的点云数据在栅格中的连通区域,包括:
28、将所述铁路接触网的点云数据按照预定的步长划分到所述栅格中,并记录所述每个激光脚点在所述栅格中对应的行和列;
29、根据立柱点云的高程分布特征,确定所述立柱点云在所述栅格中的位置,并以所述立柱点云为断点将所述栅格的连通区域进行分割,获得多个栅格连通区域集合;
30、根据所述接触线点云所在栅格高差大于其他非接触线栅格,计算多个栅格连通区域的平均高差,并根据预设高差阈值,确定所述接触线的点云数据在所述栅格中的连通区域,其中,所述预设高差阈值是根据接触线和承力索之间的垂直距离确定的。
31、可选的,所述根据立柱点云的高程分布特征,确定所述立柱点云在所述栅格中的位置,并以所述立柱点云为断点将所述栅格的连通区域进行分割,获得多个栅格连通区域集合,包括:
32、遍历所有栅格,确定所有栅格中点云的最大高程值和最小高程值,以得到所有栅格的高差值;
33、将所有栅格的高差值由大到小排序,依次取最大值,并将其对应的栅格索引加入初始栅格集合中,根据所述栅格索引找到对应的八邻域栅格高差,将小于所述预设高差阈值的栅格视为所述立柱的点云所在栅格,并将其从所述初始栅格集合中去除,获得目标栅格集合;
34、对所述目标栅格集合进行连通性分析,得到多个栅格连通区域集合。
35、可选的,所述对所述铁路接触网的点云数据进行处理,获得接触线的点云数据集合,还包括:
36、根据所述高程分割阈值去除所述栅格中包含的吊弦和承力索的点云,并找到存在所述吊弦的点云的异常栅格,并记录其索引值;
37、根据栅格位置关系,确定所述异常栅格对应的八邻域栅格索引,取出其中非空栅格作为临近栅格,并记录所述临近栅格的索引;
38、统计所述临近栅格中的点云的高程最大值形成最大值集合,并将所述异常栅格中大于所述最大值集合中的最小值的激光脚点视为非接触线点;
39、剔除所述非接触线点对应的点云数据,获得所述接触线的点云数据集合。
40、可选的,所述对所述接触线误差范围内的点云进行筛选,将属于所述接触线的点云加入到所述接触线的点云数据集合中,进而优化所述接触线的点云数据,获得所述铁路接触线的目标点云数据,包括:
41、分别计算所述接触线误差范围内的点云到接触线点云的最小距离;
42、判断所述最小距离是否小于所述第二距离阈值,若是,则确定所述接触线误差范围内的点云是接触线的点云,并将其加入所述接触线的点云数据集合,进而优化所述接触线的点云数据,获得所述铁路接触线的目标点云数据。
43、另一方面,本发明提供一种计算机可读存储介质,该计算机可读存储介质上存储有指令,该指令用于执行上述所述的铁路接触线的点云数据的获取方法。
44、另一方面,本发明提供一种处理器,用于运行程序,其中,所述程序被运行时用于执行上述所述的铁路接触线的点云数据的获取方法。
45、通过上述技术方案,将获取到的接触网的点云数据进行处理,获得接触线的点云数据集合,并基于构建的接触线点云的高维索引树形数据结构,获的接触线误差范围内的点云,更加节省时间,而且通过对接触线误差范围内的点云进行筛选,进而优化接触线的点云数据,获得铁路接触线的目标点云数据,其准确度较高。
46、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20241015/313973.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。