磁悬浮机组及其控制方法、装置、存储介质和程序产品与流程
- 国知局
- 2024-10-15 09:28:25
本发明属于磁悬浮机组,具体涉及一种磁悬浮机组的控制方法、装置、磁悬浮机组、存储介质和计算机程序产品,尤其涉及一种磁悬浮机组的电涡流位移传感器故障报警方式以及处理方法、装置、磁悬浮机组、存储介质和计算机程序产品。
背景技术:
1、在使用磁悬浮轴承的电机系统中,磁悬浮轴承利用磁力作用将电机的转子悬浮于空中,由于转子与定子之间没有机械接触,电机转子可以进行高速旋转从而完成带动负载的要求。
2、磁悬浮轴承一般是双闭环控制,内环为电流环用于控制线圈电流,外环为位移环用于控制转子的位置即位移信号。在磁悬浮轴承实际运行过程中,尤其是转子高速带载时,如果电涡流位移传感器出现失效等状况,位移环会按照错误的位移信号进行调节,原本浮空的转子会与定子产生激烈的摩擦,避免不了使转子变形,质心偏移,致使磁悬浮机组很难重启运行。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的目的在于,提供一种磁悬浮机组的控制方法、装置、磁悬浮机组、存储介质和计算机程序产品,以解决在磁悬浮机组的电涡流位移传感器失效的情况下若位移环继续按当前检测到的位移信号进行调节,则会使转子与定子产生摩擦而使转子变形,导致磁悬浮机组很难重启运行的问题,达到通过检测电涡流位移传感器的故障信号,并对检测到的故障信号进行补偿,避免转子与定子产生摩擦而使转子变形,实现磁悬浮机组的平稳停机的控制,使磁悬浮机组能够重启运行的效果。
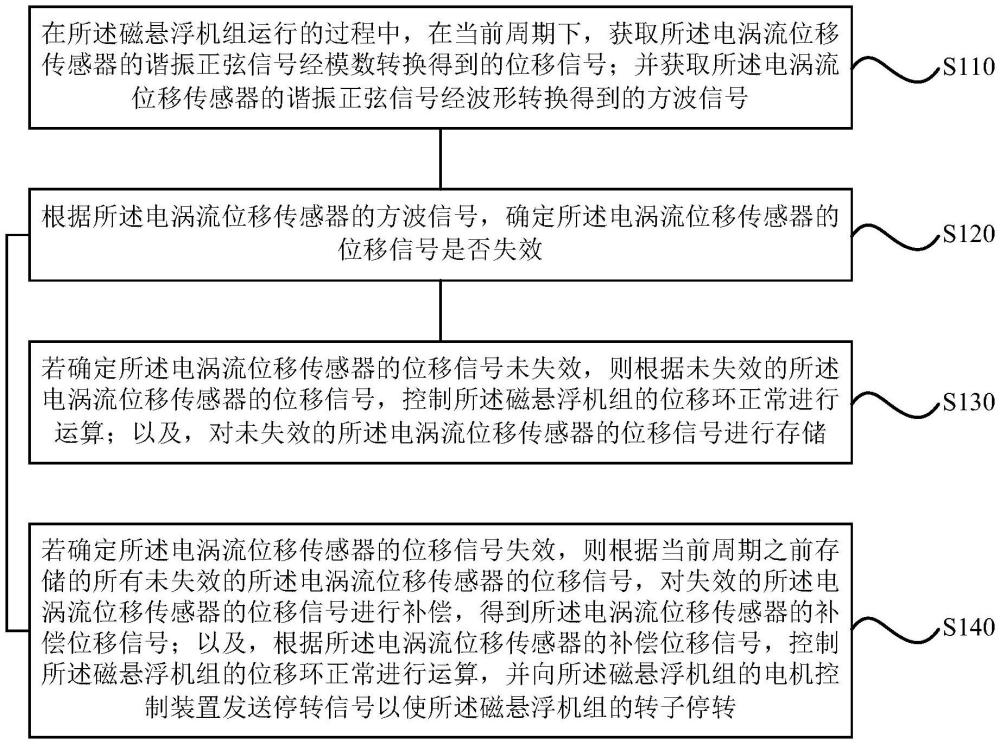
2、本发明提供一种磁悬浮机组的控制方法,所述磁悬浮机组具有电涡流位移传感器;所述电涡流位移传感器,在激励信号的作用下能够进行谐振,产生谐振正弦信号;所述磁悬浮机组的控制方法,包括:在所述磁悬浮机组运行的过程中,在当前周期下,获取所述电涡流位移传感器的谐振正弦信号经模数转换得到的位移信号;并获取所述电涡流位移传感器的谐振正弦信号经波形转换得到的方波信号;根据所述电涡流位移传感器的方波信号,确定所述电涡流位移传感器的位移信号是否失效;若确定所述电涡流位移传感器的位移信号未失效,则根据未失效的所述电涡流位移传感器的位移信号,控制所述磁悬浮机组的位移环进行运算;以及,对未失效的所述电涡流位移传感器的位移信号进行存储;若确定所述电涡流位移传感器的位移信号失效,则根据当前周期之前存储的所有未失效的所述电涡流位移传感器的位移信号,对失效的所述电涡流位移传感器的位移信号进行补偿,得到所述电涡流位移传感器的补偿位移信号;以及,根据所述电涡流位移传感器的补偿位移信号,控制所述磁悬浮机组的位移环进行运算,并向所述磁悬浮机组的电机控制装置发送停转信号以使所述磁悬浮机组的转子停转。
3、在一些实施方式中,根据所述电涡流位移传感器的方波信号,确定所述电涡流位移传感器的位移信号是否失效,包括:确定所述电涡流位移传感器的方波信号在当前周期内是否发生跳变;若确定所述电涡流位移传感器的方波信号在当前周期内发生跳变,则确定所述电涡流位移传感器的位移信号未失效;若确定所述电涡流位移传感器的方波信号在当前周期内未发生跳变,则确定所述电涡流位移传感器的位移信号失效。
4、在一些实施方式中,对未失效的所述电涡流位移传感器的位移信号进行存储,包括:将当前周期下未失效的所述电涡流位移传感器的位移信号存储在预设的存储器中,将未失效的所述电涡流位移传感器的位移信号的累计存储计数值k加1;将所述存储器中已存储的当前周期之前的k-n个未失效的所述电涡流位移传感器的位移信号舍弃,以得到当前周期之前存储的所有未失效的所述电涡流位移传感器的位移信号;其中,n为预先设置的最大存储个数、且n为正整数。
5、在一些实施方式中,根据当前周期之前存储的所有未失效的所述电涡流位移传感器的位移信号,对失效的所述电涡流位移传感器的位移信号进行补偿,得到所述电涡流位移传感器的补偿位移信号,包括:针对当前周期之前存储的所有未失效的所述电涡流位移传感器的位移信号,求取加权平均值,作为所述电涡流位移传感器的平均位移信号;利用所述电涡流位移传感器的平均位移信号,代替当前周期失效的所述电涡流位移传感器的位移信号,实现对当前周期失效的所述电涡流位移传感器的位移信号的补偿,得到所述电涡流位移传感器的补偿位移信号。
6、在一些实施方式中,针对所述电涡流位移传感器,设置有第一信号处理装置和第二信号处理装置;其中,获取所述电涡流位移传感器的谐振正弦信号经模数转换得到的位移信号,包括:获取所述电涡流位移传感器的谐振正弦信号经所述第一信号处理装置进行模数转换得到的位移信号;获取所述电涡流位移传感器的谐振正弦信号经波形转换得到的方波信号,包括:获取所述电涡流位移传感器的谐振正弦信号经所述第二信号处理装置进行波形转换得到的方波信号。
7、在一些实施方式中,其中,所述第一信号处理装置包括模拟信号处理电路,所述第二信号处理装置包括滞回比较器。
8、与上述方法相匹配,本发明另一方面提供一种磁悬浮机组的控制装置,所述磁悬浮机组具有电涡流位移传感器;所述电涡流位移传感器,在激励信号的作用下能够进行谐振,产生谐振正弦信号;所述磁悬浮机组的控制装置,包括:获取单元,被配置为在所述磁悬浮机组运行的过程中,在当前周期下,获取所述电涡流位移传感器的谐振正弦信号经模数转换得到的位移信号;并获取所述电涡流位移传感器的谐振正弦信号经波形转换得到的方波信号;控制单元,被配置为根据所述电涡流位移传感器的方波信号,确定所述电涡流位移传感器的位移信号是否失效;所述控制单元,还被配置为若确定所述电涡流位移传感器的位移信号未失效,则根据未失效的所述电涡流位移传感器的位移信号,控制所述磁悬浮机组的位移环进行运算;以及,对未失效的所述电涡流位移传感器的位移信号进行存储;所述控制单元,还被配置为若确定所述电涡流位移传感器的位移信号失效,则根据当前周期之前存储的所有未失效的所述电涡流位移传感器的位移信号,对失效的所述电涡流位移传感器的位移信号进行补偿,得到所述电涡流位移传感器的补偿位移信号;以及,根据所述电涡流位移传感器的补偿位移信号,控制所述磁悬浮机组的位移环进行运算,并向所述磁悬浮机组的电机控制装置发送停转信号以使所述磁悬浮机组的转子停转。
9、在一些实施方式中,所述控制单元,根据所述电涡流位移传感器的方波信号,确定所述电涡流位移传感器的位移信号是否失效,包括:确定所述电涡流位移传感器的方波信号在当前周期内是否发生跳变;若确定所述电涡流位移传感器的方波信号在当前周期内发生跳变,则确定所述电涡流位移传感器的位移信号未失效;若确定所述电涡流位移传感器的方波信号在当前周期内未发生跳变,则确定所述电涡流位移传感器的位移信号失效。
10、在一些实施方式中,所述控制单元,对未失效的所述电涡流位移传感器的位移信号进行存储,包括:将当前周期下未失效的所述电涡流位移传感器的位移信号存储在预设的存储器中,将未失效的所述电涡流位移传感器的位移信号的累计存储计数值k加1;将所述存储器中已存储的当前周期之前的k-n个未失效的所述电涡流位移传感器的位移信号舍弃,以得到当前周期之前存储的所有未失效的所述电涡流位移传感器的位移信号;其中,n为预先设置的最大存储个数、且n为正整数。
11、在一些实施方式中,所述控制单元,根据当前周期之前存储的所有未失效的所述电涡流位移传感器的位移信号,对失效的所述电涡流位移传感器的位移信号进行补偿,得到所述电涡流位移传感器的补偿位移信号,包括:针对当前周期之前存储的所有未失效的所述电涡流位移传感器的位移信号,求取加权平均值,作为所述电涡流位移传感器的平均位移信号;利用所述电涡流位移传感器的平均位移信号,代替当前周期失效的所述电涡流位移传感器的位移信号,实现对当前周期失效的所述电涡流位移传感器的位移信号的补偿,得到所述电涡流位移传感器的补偿位移信号。
12、在一些实施方式中,针对所述电涡流位移传感器,设置有第一信号处理装置和第二信号处理装置;其中,所述获取单元,获取所述电涡流位移传感器的谐振正弦信号经模数转换得到的位移信号,包括:获取所述电涡流位移传感器的谐振正弦信号经所述第一信号处理装置进行模数转换得到的位移信号;所述获取单元,获取所述电涡流位移传感器的谐振正弦信号经波形转换得到的方波信号,包括:获取所述电涡流位移传感器的谐振正弦信号经所述第二信号处理装置进行波形转换得到的方波信号。
13、在一些实施方式中,其中,所述第一信号处理装置包括模拟信号处理电路,所述第二信号处理装置包括滞回比较器。
14、与上述装置相匹配,本发明再一方面提供一种磁悬浮机组,包括:以上所述的磁悬浮机组的控制装置。
15、与上述磁悬浮机组相匹配,本发明再一方面提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以上所述的磁悬浮机组的控制方法的步骤。
16、与上述方法相匹配,本发明再一方面提供一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行以上所述的磁悬浮机组的控制方法的步骤。
17、由此,本发明的方案,通过针对磁悬浮机组的电涡流位移传感器,在电涡流传感器在激励信号的作用下谐振产生谐振正弦信号的情况下,将该谐振正弦信号经模拟信号处理电路进行模拟信号处理得到位移信号并传输至主控芯片,还将该谐振正弦信号经滞回比较器转化为方波信号并传输至主控芯片;主控芯片通过由谐振正弦信号转换得到的方波信号是否有跳变,判断由谐振正弦信号转换得到的位移信号是否失效:若由谐振正弦信号转换得到的方波信号有跳变则判断由谐振正弦信号转换得到的位移信号未失效,将由谐振正弦信号转换得到的位移信号的数据进行存储并对存储数据的计数器k的值加1,将之前存储的k-n个数据舍弃(n为存储数据的最大个数),按由谐振正弦信号转换得到的位移信号继续控制磁悬浮机组的运行;若由谐振正弦信号转换得到的方波信号没有跳变则判断由谐振正弦信号转换得到的位移信号失效,则将之前存储的所有数据的平均值替代当前的位移信号,按之前存储的所有数据的平均值继续控制磁悬浮机组的运行,从而,通过检测电涡流位移传感器的故障信号,并对检测到的故障信号进行补偿,避免转子与定子产生摩擦而使转子变形,实现磁悬浮机组的平稳停机的控制,使磁悬浮机组能够重启运行。
18、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
19、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
本文地址:https://www.jishuxx.com/zhuanli/20241015/314240.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。