一种磁悬浮旋转机械、磁悬浮电机及控制方法与流程
- 国知局
- 2024-09-05 14:38:08
本发明涉及磁悬浮,尤其涉及一种磁悬浮旋转机械、磁悬浮电机及控制方法。
背景技术:
1、在磁悬浮转子轴系中,常规的磁悬浮径向轴承的定子,通常是相邻磁极组成一个磁极对,相邻磁极对的相邻磁极的极性相同。每个磁极对与磁悬浮径向轴承的转子之间采用吸引的方式工作。每个磁极对的相对磁极对差动供电,即,一个磁极对中的电流增大时,其相对的磁极对中的电流将减少。
2、但是,常规的磁悬浮径向轴承为了保证磁路中各部分的磁阻相同,会将转子的外径与内径差值的一半与定子的磁轭部尺寸相同,这样会导致转子的实际直径很小,致使转子的刚度很低,进而降低了转子的临界转速,限制了转子转速的提高,也限制了磁悬浮动力装备的应用领域。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种磁悬浮旋转机械、磁悬浮电机及控制方法。
2、本发明的第一方面提供的一种磁悬浮旋转机械,包括:
3、转子,所述转子的表面设置有良导体层;
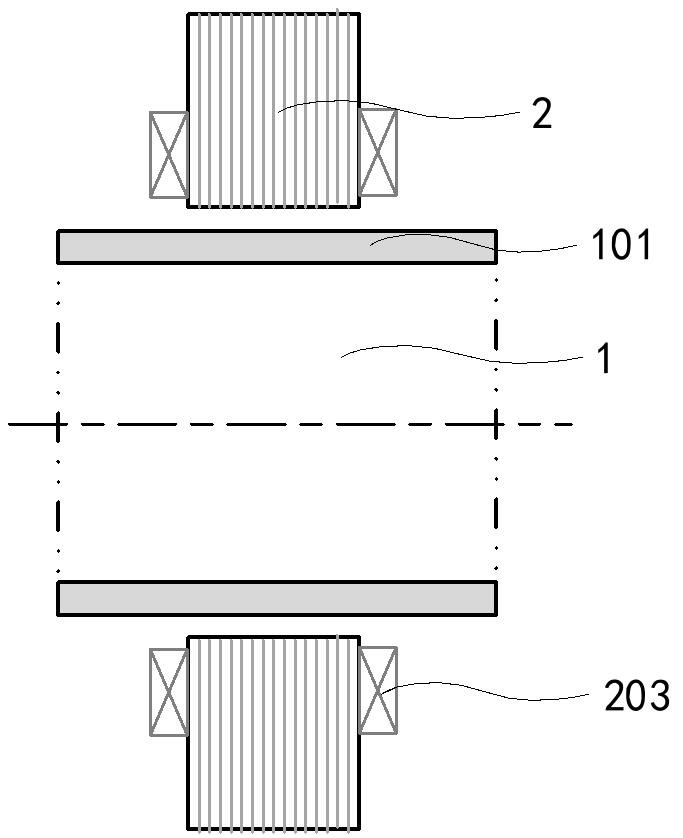
4、径向磁悬浮轴承,所述径向磁悬浮轴承套设于所述转子,所述径向磁悬浮轴承包括定子铁芯和设置在所述定子铁芯上的多个齿部,多个所述齿部上分别绕设励磁线圈以形成多个磁极,所述磁极配置为,在所述励磁线圈内通入第一交变电流,以与所述转子形成电动悬浮环;
5、电机电枢,所述电机电枢包括绕组,所述绕组内通入第二交变电流产生旋转磁场,所述旋转磁场用于驱动所述转子转动。
6、本发明第一方面提供的磁悬浮旋转机械至少包括如下技术效果:通过在转子的外表面设置一层良导体层,良导体层对转子的有效直径影响极小,因此,极大的提升了转子的刚度和临界转速,扩展了磁悬浮动力装备的应用范围,转子上的良导体层能够与径向磁悬浮轴承的磁极组成电动悬浮环,使得转子能够悬浮在径向磁悬浮轴承内,避免转子在径向磁悬浮轴承内发生径向偏移,同时可以在径向磁悬浮轴承内通过调整第一交变电流的频率,使得其产生的磁场与电机电枢产生的旋转磁场相同,避免了径向磁悬浮轴承对转子的旋转阻尼,确保转子能够平稳且连续地旋转,提高了设备运行的稳定性和可靠性,有利于降低电动悬浮功耗。
7、在上述技术方案的基础上,本发明所述的磁悬浮旋转机械还可以做如下改进。
8、本发明的一些实施例中,所述第一交变电流和所述第二交变电流的频率相匹配。
9、通过采用上述技术方案,通过将第一交变电流与第二交变电流的频率相匹配,能够使得径向磁悬浮轴承与转子的良导体层之间产生的磁场与电机电枢与转子的良导体层之间产生的旋转磁场相同,能够减少由于磁场变化频率不一致引起的能量损耗,避免了径向磁悬浮轴承对转子的旋转阻尼,减少不必要的能量消耗。
10、本发明的一些实施例中,所述磁极的数量为3n个,其中,n为大于或等于1的整数。
11、通过采用上述技术方案,将磁极的数量设置为3的倍数能够使得径向磁悬浮轴承产生的磁场分布更加均匀,有助于实现电磁力的平衡,能够将转子保持其稳定悬浮,并且能够更好的适应旋转磁场的电流频率。
12、本发明的一些实施例中,相邻三个所述磁极组成一个磁极组,每个所述磁极组均通入所述第一交变电流。
13、通过采用上述技术方案,在某些控制策略中,为了相适应基于三相交流电的控制系统的旋转磁场,采用3的倍数磁极数量有助于简化控制算法和电路设计。
14、本发明的一些实施例中,所述转子在各个轴向位置的外径均相等。
15、通过采用上述技术方案,转子外径在各个轴向位置相等,使得转子在各个方向上的受力更为均匀,减少了因受力不均而产生的结构应力,提高了转子的结构稳定性和寿命,同时,均匀的转子外径有助于减少旋转过程中的不平衡振动,提高磁悬浮旋转机械的运行平稳性。
16、本发明的一些实施例中,所述转子为铜弊转子。
17、通过采用上述技术方案,铜弊转子是在转子的外表面覆以一定厚度的铜,覆铜后对转子的有效直径降低很少,且铜弊转子在交变磁场中,覆铜层内部会产生涡流,其涡流产生磁场,其磁场能够避免转子在径向磁悬浮轴承内产生偏移,使得转子在径向磁悬浮轴承和电机电枢中更加稳定可靠的悬浮。
18、本发明的一些实施例中,所述铜弊转子的覆铜厚度为1至19mm。
19、通过采用上述技术方案,通过调整铜弊转子的覆铜厚度,有助于增强电磁承载力,使转子在悬浮状态下更加稳定,同时能够提高转子的临界转速。
20、本发明的第二方面还提供了一种磁悬浮旋转机械的控制方法,应用于上述第一方面任一项所述的磁悬浮旋转机械,包括以下步骤:
21、向径向磁悬浮轴承的磁极内通入第一交变电流,以使得所述径向磁悬浮轴承与所述转子形成电动悬浮环;
22、向电机电枢内通入第二交变电流,以产生旋转磁场驱动所述转子转动。
23、本发明第二方面提供的磁悬浮旋转机械的控制方法至少包括如下技术效果:
24、通过控制通入径向磁悬浮轴承的磁极和电枢的交变电流,可以实现对转子悬浮位置和旋转速度的精确控制,实现转子与轴承之间的无接触悬浮,消除了传统机械轴承中的摩擦和磨损,从而显著提高了旋转机械的稳定性和可靠性,同时可以通过调整在径向磁悬浮轴承内的第一交变电流的频率,使得其产生的磁场与电机电枢产生的旋转磁场相同,避免了径向磁悬浮轴承对转子的旋转阻尼,确保转子能够平稳且连续地旋转,提高了设备运行的稳定性和可靠性,有利于降低电动悬浮功耗。
25、本发明的一些实施例中,所述向径向磁悬浮轴承的磁极内通入第一交变电流的步骤具体包括:
26、将所述径向磁悬浮轴承内的多个磁极分成不同的磁极组,其中,每个磁极组内包括三个相邻的磁极;
27、在每个所述磁极组内均通入的所述第一交变电流。
28、通过采用上述技术方案,通过将磁极分组并独立控制每组内的磁极,可以更加精确地控制每个磁极产生的电磁力,从而实现对转子悬浮位置和姿态的精确控制,提高旋转机械的稳定性和运行精度,根据实际需求调整每个磁极组的电流大小和相位,可以优化电磁力的分布,减少不必要的能量损耗,降低旋转机械的能耗,提高能源利用效率。
29、本发明的第三方面还提供了一种磁悬浮电机,所述磁悬浮电机包括如上述第一方面任一项所述的磁悬浮旋转机械。
30、本发明第三方面提供的磁悬浮电机至少包括如下技术效果:
31、通过采用包括有磁悬浮旋转机械的磁悬浮电机,能够极大的提升转子的刚度和临界转速,转子在高速旋转时更加稳定,减少了因振动和不平衡而产生的应力,从而延长了磁悬浮旋转机械的使用寿命,并且扩展了磁悬浮动力装备的应用范围。
技术特征:1.一种磁悬浮旋转机械,其特征在于,包括:
2.根据权利要求1所述的磁悬浮旋转机械,其特征在于,所述第一交变电流和所述第二交变电流的频率相匹配。
3.根据权利要求1所述的磁悬浮旋转机械,其特征在于,所述磁极的数量为3n个,其中,n为大于或等于1的整数。
4.根据权利要求3所述的磁悬浮旋转机械,其特征在于,相邻三个所述磁极组成一个磁极组,每个所述磁极组均通入所述第一交变电流。
5.根据权利要求1所述的磁悬浮旋转机械,其特征在于,所述转子(1)在各个轴向位置的外径均相等。
6.根据权利要求1所述的磁悬浮旋转机械,其特征在于,所述转子(1)为铜弊转子。
7.根据权利要求6所述的磁悬浮旋转机械,其特征在于,所述铜弊转子的覆铜厚度为1至19mm。
8.一种磁悬浮旋转机械的控制方法,应用于上述权利要求1-7任一项所述的磁悬浮旋转机械,其特征在于,包括以下步骤:
9.根据权利要求8所述的控制方法,其特征在于,所述向径向磁悬浮轴承(2)的磁极内通入第一交变电流的步骤具体包括:
10.一种磁悬浮电机,其特征在于,所述磁悬浮电机包括如权利要求1至7任一项所述的磁悬浮旋转机械。
技术总结本发明公开了一种磁悬浮旋转机械、磁悬浮电机及控制方法,涉及磁悬浮技术领域,其磁悬浮旋转机械包括转子、径向磁悬浮轴承和电机电枢,转子的表面设置有良导体层;径向磁悬浮轴承套设于转子,径向磁悬浮轴承包括定子铁芯和设置在定子铁芯上的多个齿部,多个齿部上分别绕设励磁线圈以形成多个磁极,与转子形成电动悬浮环;电机电枢内通入第二交变电流产生旋转磁场,旋转磁场用于驱动转子转动。在转子的外表面设置一层良导体层,良导体层对转子的有效直径影响极小,提升转子的刚度和临界转速,扩展了磁悬浮动力装备的应用范围,良导体层能与径向磁悬浮轴承组成电动悬浮环,避免转子在径向磁悬浮轴承偏移,确保转子能够平稳且连续地旋转。技术研发人员:李永胜,王献忠,李致宇,赵明师,张婕妤,于进渭,张永莲受保护的技术使用者:山东天瑞重工有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/287415.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表