基于毫米波雷达多视角数据融合的睡姿分类方法
- 国知局
- 2024-10-15 09:32:08
本公开实施例涉及数据识别,尤其涉及一种基于毫米波雷达多视角数据融合的睡姿分类方法。
背景技术:
1、睡姿是指人在睡眠中所呈现出来的身体姿势。从医学健康的角度来看,睡姿对人体的健康有很大的影响。首先,通过观察和分析个体的睡姿,可以评估其睡眠质量,帮助个体更好地了解自己的睡眠状况,从而采取措施改善睡眠质量。其次,睡姿的研究可以帮助医生辅助诊断疾病,例如睡眠障碍、呼吸问题等。此外,不同的睡姿可能会对个体的身心健康产生不同的影响,睡眠医学关注的主要类别是仰卧、俯卧和侧卧。例如,避免仰卧姿势可以降低睡眠呼吸暂停的严重程度,并降低婴儿猝死综合征(sids)的风险。因此研究睡姿有助于指导个体的睡眠训练和促进其身心健康。
2、在睡眠环境中,个体的舒适度和隐私保护至关重要,而雷达技术可以在不接触个体的前提下,实时监测睡姿变化。同时,雷达技术稳定可靠,可以为家庭及医疗机构提供持续、准确的睡眠监测服务。基于雷达的睡姿识别研究虽已取得成果,但面对不同体型、睡眠习惯和复杂环境的个体,单一视角方法难以适应多变需求,影响识别稳定性。此外,个体在睡姿上的多样性也增加了识别难度,导致模型鲁棒性受限,阻碍了技术的广泛推广与应用。
3、可见,亟需一种能无感、高效精准识别睡姿类型的基于毫米波雷达多视角数据融合的睡姿分类方法。
技术实现思路
1、有鉴于此,本公开实施例提供一种基于毫米波雷达多视角数据融合的睡姿分类方法,至少部分解决现有技术中存在识别效率和精准度较差的问题。
2、本公开实施例提供了一种基于毫米波雷达多视角数据融合的睡姿分类方法,包括:
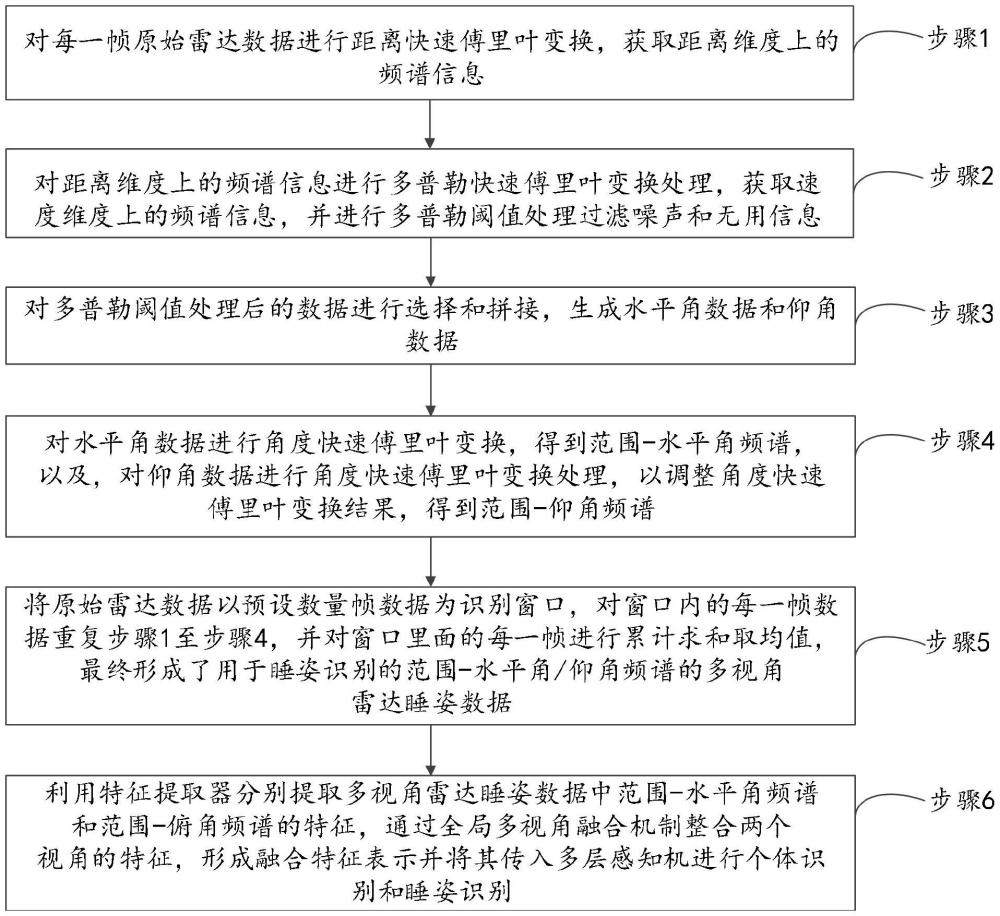
3、步骤1,对每一帧原始雷达数据进行距离快速傅里叶变换,获取距离维度上的频谱信息;
4、步骤2,对距离维度上的频谱信息进行多普勒快速傅里叶变换处理,获取速度维度上的频谱信息,并进行多普勒阈值处理过滤噪声和无用信息;
5、步骤3,对多普勒阈值处理后的数据进行选择和拼接,生成水平角数据和仰角数据;
6、步骤4,对水平角数据进行角度快速傅里叶变换,得到范围-水平角频谱,以及,对仰角数据进行角度快速傅里叶变换处理,以调整角度快速傅里叶变换结果,得到范围-仰角频谱;
7、步骤5,将原始雷达数据以预设数量帧数据为识别窗口,对窗口内的每一帧数据重复步骤1至步骤4,并对窗口里面的每一帧进行累计求和取均值,最终形成了用于睡姿识别的范围-水平角/仰角频谱的多视角雷达睡姿数据;
8、步骤6,利用特征提取器分别提取多视角雷达睡姿数据中范围-水平角频谱和范围-俯角频谱的特征,通过全局多视角融合机制整合两个视角的特征,形成融合特征表示并将其传入多层感知机进行个体识别和睡姿识别,其中,所述特征提取器包括4层稠密连接网络。
9、根据本公开实施例的一种具体实现方式,所述距离维度上的频谱信息的表达式为
10、
11、其中,x表示输入序列,ω(n)表示blackman窗函数,n为数据长度,k为频率索引。
12、根据本公开实施例的一种具体实现方式,所述多普勒快速傅里叶变换的表达式为
13、
14、其中,k表示多普勒快速傅里叶变换的长度,m表示频率索引,e-jπm表示频移操作。
15、根据本公开实施例的一种具体实现方式,所述角度快速傅里叶变换的表达式为
16、
17、其中,q表示角度维度的长度,p表示角度频率索引,nangle表示在角度维度上进行fft的点数,e-jπp表示频移操作。
18、根据本公开实施例的一种具体实现方式,所述利用特征提取器分别提取多视角雷达睡姿数据中范围-水平角频谱和范围-俯角频谱的特征的步骤,包括:
19、将雷达睡姿多视角数据通过一个一维卷积层,该层将输入的256个通道转换为64个通道,卷积核大小为3,步长为1,并进行填充得到特征图:
20、y=conv1d(x,w,b)
21、其中,x是一个视角的雷达睡姿张量数据,w是卷积核,b是偏置;
22、将特征图经过四次稠密连接网络和过渡块的重复,在每个稠密连接网络中,通过卷积操作将输入通道数增加32,然后过渡块通过卷积和池化操作将通道数减少到64:
23、(y′i=denseblock(zi-1),zi=transitionblock(y′i))×4
24、其中,zi-1表示前一层的输出。
25、根据本公开实施例的一种具体实现方式,所述通过全局多视角融合机制整合两个视角的特征的步骤,包括:
26、利用全局多视角融合机制将不同视角的特征扁平化并通过全连接层进行处理,然后通过拼接和sigmoid激活函数计算权重,并使用这些权重对原始特征进行加权融合,最后将两个视角的加权融合特征拼接在一起,得到全局的融合特征,其中,所述全局多视角融合机制的表达式为:
27、j1=w1*x1+b1 j2=w2*x2+b2
28、c1=concat(j1,j2)c2=concat(j2,j1)
29、a1=sigmoid(c1)a2=sigmoid(c2)
30、x1=x1*(a1*a2)x2=x2*(a1*a2)
31、x=concat(x1,x2)
32、其中,x1、x2是经过特征提取器提取的两个视角的一维特征,w1、w2和b1、b2分别表示全连接层的权重和偏置项,concat表示在特征维度上的连接。
33、根据本公开实施例的一种具体实现方式,所述步骤6之前,所述方法还包括:
34、利用预设的损失函数控制个体识别任务和睡姿识别任务的损失占比,对多层感知机进行训练,使得个体识别任务辅助睡姿识别任务,降低数据中存在的个体特异性,从而校准和优化睡姿识别的准确性,确保在不同个体间实现更一致和可靠的识别效果,其中,所述预设的损失函数的表达式为:
35、loss=d1*losssleep+d2*lossindividual
36、losssleep=crossentropyloss(outputsleep,labelsleep)
37、lossindividual=crossentropyloss(outputindividual,labelindividual)
38、其中,losssleep表示睡姿识别任务的损失,lossindividual表示个体识别任务的损失,outputsleep、outputindividual分别表示在训练时的睡姿识别任务和个体识别任务的结果,labelsleep、labelindividual分别表示多视角数据的睡姿标签和个体标签,d1、d2分别表示睡姿识别任务和个体识别任务在训练过程中的损失权重。
39、本公开实施例中的基于毫米波雷达多视角数据融合的睡姿分类方案,包括:步骤1,对每一帧原始雷达数据进行距离快速傅里叶变换,获取距离维度上的频谱信息;步骤2,对距离维度上的频谱信息进行多普勒快速傅里叶变换处理,获取速度维度上的频谱信息,并进行多普勒阈值处理过滤噪声和无用信息;步骤3,对多普勒阈值处理后的数据进行选择和拼接,生成水平角数据和仰角数据;步骤4,对水平角数据进行角度快速傅里叶变换,得到范围-水平角频谱,以及,对仰角数据进行角度快速傅里叶变换处理,以调整角度快速傅里叶变换结果,得到范围-仰角频谱;步骤5,将原始雷达数据以预设数量帧数据为识别窗口,对窗口内的每一帧数据重复步骤1至步骤4,并对窗口里面的每一帧进行累计求和取均值,最终形成了用于睡姿识别的范围-水平角/仰角频谱的多视角雷达睡姿数据;步骤6,利用特征提取器分别提取多视角雷达睡姿数据中范围-水平角频谱和范围-俯角频谱的特征,通过全局多视角融合机制整合两个视角的特征,形成融合特征表示并将其传入多层感知机进行个体识别和睡姿识别,其中,所述特征提取器包括4层稠密连接网络。
40、本公开实施例的有益效果为:通过本公开的方案,有效整合了雷达的范围俯角和仰角数据,实现对个体睡姿的全方位监测,为增强方案通用性,使用个体识别辅助睡姿识别,通过学习和分析个体特征,校准和优化识别准确性,确保跨个体识别的一致性和可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20241015/314480.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表