一种基于动静态风险协同评估的低空航路网络规划方法
- 国知局
- 2024-10-15 09:57:40
本发明涉及城市低空航路网络规划,具体涉及一种基于动静态风险协同评估的低空航路网络规划方法。
背景技术:
1、随着以垂直起降航空器为载运工具的城市空中交通新型模式的兴起,吸引了社会广泛关注,催生了大量的城市空中交通领域新理念和新技术。尤其是在城市低空“最后三公里”物流包裹运输方面,市场潜力巨大,被认为是有效减轻地面物流压力的有效途径之一。无人机具备低成本、机动性高和实时操控性强的特性,使得无人机在各个领域都有着广泛的应用前景。随着无人机数量的增加、低空空域逐渐开放,以及互联网经济蓬勃发展,低空飞行需求将会日益激增。
2、然而,我国低空空域目前尚未完全开放,城市低空航路航线规划、航路航线组网和无人机运行安全等核心问题仍处于探索阶段。现有航路网络规划方法是基于od(originaldestination)需求和规避障碍物的点对点连接,所出现的航路重叠将会造成无人机碰撞隐患。面向当前低空大规模物流包裹运输场景,为了有效地减少航路重叠、避免无人机飞行冲突、降低空中无人碰撞风险并提高航路规划的公平性,规划具有安全间隔的无人机固定航路是一种有潜力的解决思路,可以保障城市低空无人机安全、高效、有序地飞行作业。
技术实现思路
1、发明目的:针对现有技术不足,本发明提出一种基于动静态风险协同评估的低空航路网络规划方法,在规划的过程中既考虑空中楼宇障碍物所产生的静态风险,又从网络动态规划的角度考虑航路本身所产生的动态风险。
2、技术方案:一种基于动静态风险协同评估的低空航路网络规划方法,包括以下步骤:
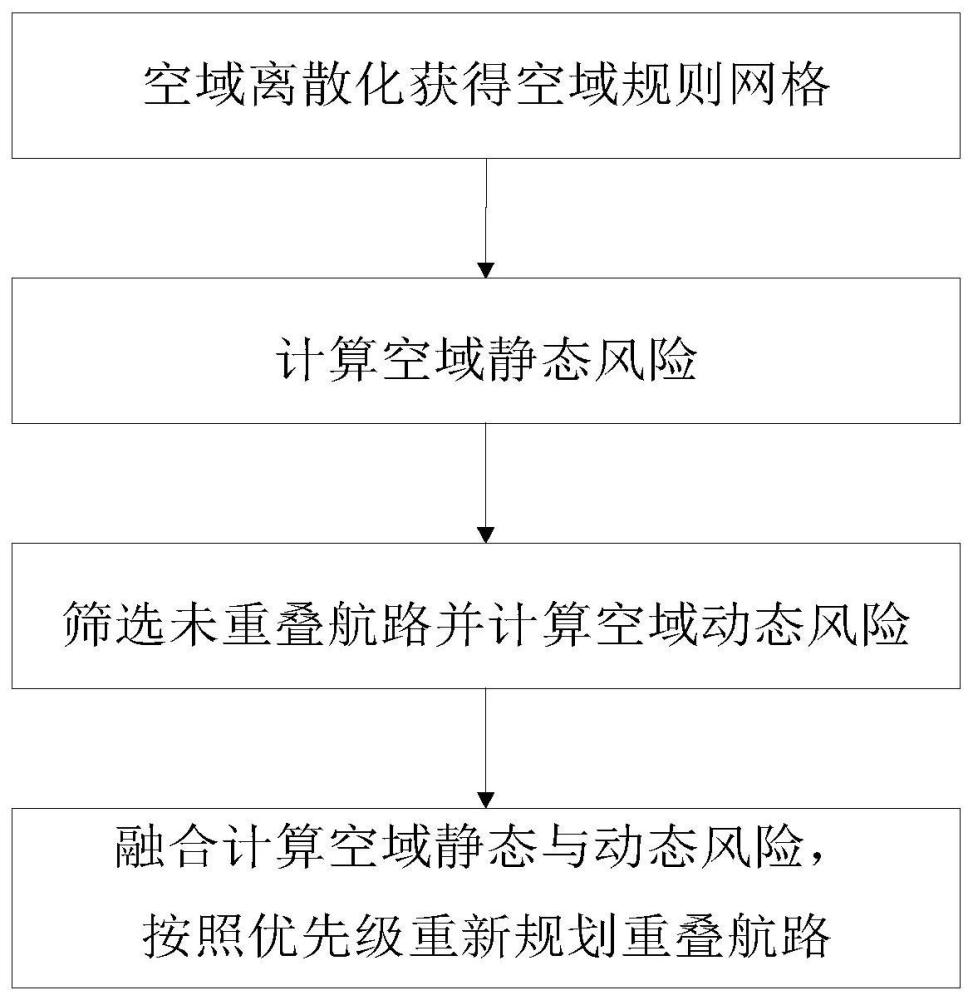
3、s1:基于低空飞行任务需求分布确定规划空域,对空域进行离散剖分处理获得空域规则网格,基于建筑物形状、高度与分布情况设置低空空域禁飞区,根据禁飞区分布计算力场排斥函数以量化计算空域静态风险,并将其映射至空域网格;
4、s2:使用考虑转弯代价的改进a*算法与随机分形搜索算法规划各od间的初始航路,并计算空域动态风险;
5、s3:基于步骤s1得到的空域静态与步骤s2得到的空域动态风险计算综合风险代价,利用重叠航路长度和重叠次数计算效率代价,使用改进字典排序法对重叠航路进行“安全-效率”综合优先级排序,公平配置航路优先级并实现重叠航路重规划。
6、进一步地,s1中所述基于低空飞行任务需求分布确定规划空域,对空域进行离散剖分处理获得空域规则网格的具体方法是:
7、低空空域飞行任务需求分布设定网格以划分区域,规划空域为边长长度为l×j的二维矩形平面区域,所述二维矩形平面区域的四个顶点的坐标分别为(xmax,ymax)、(xmax,ymin)、(xmin,ymin)、(xmin,ymax),并此基础上将规划区域等分为u×w个边长为的二维正方形网格;
8、所述二维矩形平面区域内网格坐标(xi,yi)所对应的编号i为:
9、
10、s1中所述基于建筑物形状、高度与分布情况设置低空空域禁飞区,使用力场排斥函数以量化计算空域静态风险,并将其映射至空域网格的具体方法是:
11、城市低空空域无人机作业空域存在固定障碍物表示为:
12、
13、考虑无人机对固定障碍物的碰撞风险,将以网格i所对应坐标(xi,yi)为圆心、排斥力辐射距离阈值d0为半径计算障碍物碰撞风险集合表示为:
14、setobstacle_i(xi,yi)={robstacle_i1(xi,yi),robstacle_i2(xi,yi),...,robstacle_iu(xi,yi),...,robstacle_in(xi,yi)}
15、其中,robstacle_iu(xi,yi)为禁飞区t对空域网格i的力场排斥函数,表示为:
16、
17、其中,(xu,yu)为障碍物u的网格坐标,m1为禁飞区t的风险系数,d0为排斥力辐射距离阈值,超出d0将不存在排斥力;然后将网格所对应坐标(xi,yi)内个禁飞区网格的碰撞风险相加,即可得到空域静态风险rstatic_i(xi,yi):
18、
19、进一步地,s2中所述使用考虑转弯代价的改进a*算法与随机分形搜索算法规划各od间的初始航路的具体方法是:
20、在使用考虑转弯代价的改进a*算法进行路径规划时,其代价函数为:
21、
22、其中,k为路径规划开始o点到点处所经历的转弯次数;ε为转弯参数,表示在障碍物附近转弯的影响程度;tc为转弯代价;为位置在已经规划航路中重叠的次数;ec为加权系数,表示规划航路绕过一个重叠的位置可以接受的代价,ec值越高表示处所重叠的航路条数越多;为绕过位置可以承受的最大代价,为o点到点处的真实代价,为点到终点d=(xd,yd)的估计代价,和的计算公式分别为:
23、
24、其中,rstatic_i(xi,yi)为静态风险,rdynamic_i(xi,yi)为动态风险,在初始航路规划时rdynamic_i(xi,yi)=0;
25、在使用随机分形搜索算法规划各od间的初始航路,该算法包括扩散过程和更新过程,扩散过程执行开发任务,更新过程提供勘探能力其主要步骤如下:
26、p1:单体分型阶段,进行个体种群初始化,单体随机分型公式为:
27、
28、其中,为个体数量为n的种群集合,u和l分别是规划空间的上界和下界,pi是种群p的第个个体;
29、采用高斯游动分布生成新的个体,公式为:
30、
31、gw2=gaussian(μp,σ)
32、在公式中,gaussian是高斯分布,bp是新的个体位置,μbp是bp的平均值,μp是集合p的平均值,和为[0,1]之间的随机数,迭代次的方差σ为计算公式如下:
33、
34、p2:新个体生成阶段,在个体的分形产生新的个体后,种群p’中的个体需要根据以下公式计算个体的选择概率
35、
36、其中,rank()是从小到大排序函数;是第个个体在群体p′中的适应能力;是p′种群的适应能力序列;
37、第一个更新阶段是局部更新性能较差的单个粒子,对于每个个体,如果它的选择概率其维度更新如下:
38、
39、在公式中,且当更新后的适应度优于亲代,新的个体将其取代;
40、第二阶段是更新对性能较差的单个粒子进行更新,首先,与第一个更新阶段一样,根据个体的选择概率pax对个体进行排序,然后对于每个个体,如果满足条件,则进行以下随机更新:
41、
42、在公式中,个体p″t和p″r是种群p″中随机选择的两个个体;ε’是高斯均匀分布的随机数,当个体的适应度大于亲代的适应度时,新的个体也必须取代亲代。
43、进一步地,所述s2中计算空域动态风险,根据初始航路规划结果,统计计算未重叠航路集合setnolap-route:
44、setnolap-rout={nolap_route1,nolap_route2,...,nolap_router,...,nolap_routee}
45、其中,nolap_router为未重叠航路集合setnolap-rout中的未重叠航路,e为未重叠航路的数量,r为集合中第r条未重叠航路;
46、需要根据当前规划航路结果,计算空域动态风险,步骤如下:
47、d1:计算未重叠航路nolap_routek中网格(xl,yl)对网格i的航路碰撞风险:
48、
49、其中,m2为航路风险系数,d1为航路风险辐射距离阈值,超出d1将不存在航路风险;
50、d2:计算以网格(xi,yi)为圆心、d1为半径的统计风险区域中,未重叠航路的碰撞风险网格集合:
51、
52、其中,z为以网格(xi,yi)为圆心、d1为半径的统计风险区域中未重叠航路数量,为setnolap_route_i中第个碰撞风险网格的风险值;
53、d3:将网格(xi,yi)内ω条航路的吸引成本求和,得到空域动态风险rdynamic_i(xi,yi):
54、
55、进一步地,所述s3中基于空域静态与动态风险计算综合风险代价,利用重叠航路长度和重叠次数计算效率代价,根据空域静态风险与动态风险,对网格(xi,yi)进行空域动-静态综合风险ri(xi,yi)计算:
56、ri(xi,yi)=0.5×rstatic_i(xi,yi)+0.5×rdynamic_i(xi,yi)
57、则重叠航路τ的综合风险代价计算公式如下:
58、
59、其中,τ为第r条未重叠航路经过的航路网格点;
60、根据航路综合风险,得到重叠航路风险集合:
61、
62、其中,为setr-route中第条航路的综合风险代价,为setr-route中重叠航路数量;
63、计算出空域重叠航路重叠次数集合setlap-route-ti与航路长度集合setlen-lap-route:
64、
65、其中,为setlap-route-ti第条重叠航路与其他航路的重叠次数,为重叠航路的长度;
66、的效率代价为重叠航路长度和重叠次数的乘积,其公式为:
67、
68、根据航路效率代价,得到重叠航路风险集合
69、
70、为消除和两者的量纲差异,使用min-max方法对setr-route和sete-cost进行归一化处理,得到set′r-rou和set′e-cost,其中min-max方法公式为:
71、
72、其中,f(x)max和f(x)min分别表示集合中的最大值和最小值,f(β)表示集合中的第β个值。
73、进一步地,所述s3中使用改进字典排序法对重叠航路进行“安全-效率”综合优先级排序,公平配置航路优先级并实现重叠航路重规划,利用改进字典排序法,对set′r-rou和set′e-cost进行重规划顺序排序,其包括如下步骤:
74、e1:对set′r-route和set′e-cos集合按照代价大小顺序进行排序,得到集合set″r-route和set″e-cost,从set″r-rou和set″e-cos集合中最后一个航路开始,进行依次向前进行比较;
75、e2:若集合set″r-rou和set″e-cos中均有未规划航路,则选择两集合中代价最大的航路,并将其设置为该次序需要规划的航路,转步骤e3;若集合set″r-rou和set″e-c规划次序中有一条需要规划航路,将其设置为该次序需要规划的航路;若集合set″r-rou和set″e-cost规划次序中没有需要规划航路,转步骤e2选择下一次序需要排序的航路;
76、e4:删除该次序未选中规划航路的集合中已规划航路,转步骤e2选择下一次序需要排序的航路;
77、根据步骤e1-e3得到“安全-效率”综合优先级排序,根据该序列,依次对重叠航路进行路径重规划,其主要步骤如下:
78、f1:将未重叠航路网格设置为禁飞区;
79、f2:根据wod_set中重叠航路排列顺序,按顺序依次选择重叠航路;
80、f3:使用所述考虑转弯代价的改进a*算法,对重叠航路进行路径重规划;
81、f4:将新规划航路设置为禁飞区;
82、f5:重复f2-f4步骤,直至所有重叠航路规划完毕。
本文地址:https://www.jishuxx.com/zhuanli/20241015/315910.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。