VSG型储能系统仿真模型的控制参数辨识方法及系统与流程
- 国知局
- 2024-10-15 10:11:11
本发明属于电气自动化领域,具体涉及一种vsg型储能系统仿真模型的控制参数辨识方法及系统。
背景技术:
1、随着经济技术的发展和人们生活水平的提高,电能已经成为了人们生产和生活中必不可少的二次能源,给人们的生产和生活带来了无尽的便利。因此,保障电能的稳定可靠供应,就成为了电力系统最重要的任务之一。
2、目前,环境问题越来越严重,因此越来越多的新能源发电系统开始并入电网并发电。随着高比例新能源发电系统的接入,电力系统的动态性能面临着越来越严峻的考验。此外,新能源发电系统对外表现的电流源外特性、依赖锁相环、缺乏阻尼惯量支撑能力、无法独立孤岛运行等问题,也使得电力系统面临着越来越严重的稳定运行压力。
3、虚拟同步发电机(virtual synchronous generator,vsg)控制技术,具有电压源外特性、良好的阻尼与惯性支撑能力、可独立孤岛运行等优点,已经被广泛应用于光伏,风机等新能源发电系统。同时,研究人员也已经提出,将vsg应用于储能系统,能够是的储能系统克服传统控制方式的缺点,有助于储能电站的安全稳定运行,同时为电力系统提供更加可靠、更优质的调压、调频、应急服务。
4、为了对vsg型储能系统进行更加深入的研究,对vsg型储能系统的建模显得尤为重要。因此,准确获取模型参数是建立vsg型储能系统模型的前提。目前,常用的模型参数辨识方案,主要有理论解析法、数值计算法、智能优化算法:理论解析法是基于系统运行机理,将电化学过程与等效模型中的电路元件进行对应,通过对模型的v-i特性曲线进行微分求导等运算,确定模型中的未知参数;但是,随着系统结构越来越复杂,理论解析法的参数辨识的准确性正在不断下降。数值计算法本质是通过迭代的方式使模型输出的仿真曲线尽可能接近实测曲线,进而求得模型参数最优解;但是,数值法的性能取决于目标函数和参数初值设定,人为因素大,而且该方案并不适用于复杂非线性模型的参数辨识。智能优化算法是通过模拟自然现象规律和生物群体社会性行为的一种寻优算法,该方案通过逐步寻优策略辨识出模型参数的最优解;但是,智能优化算法在求解非线性、多极值的复杂系统的参数辨识时,易陷入早熟困境,可靠性和精确性都较差。
技术实现思路
1、本发明的目的之一在于提供一种可靠性高且精确性好的vsg型储能系统仿真模型的控制参数辨识方法。
2、本发明的目的之二在于提供一种实现所述vsg型储能系统仿真模型的控制参数辨识方法的系统。
3、本发明提供的这种vsg型储能系统仿真模型的控制参数辨识方法,包括如下步骤:
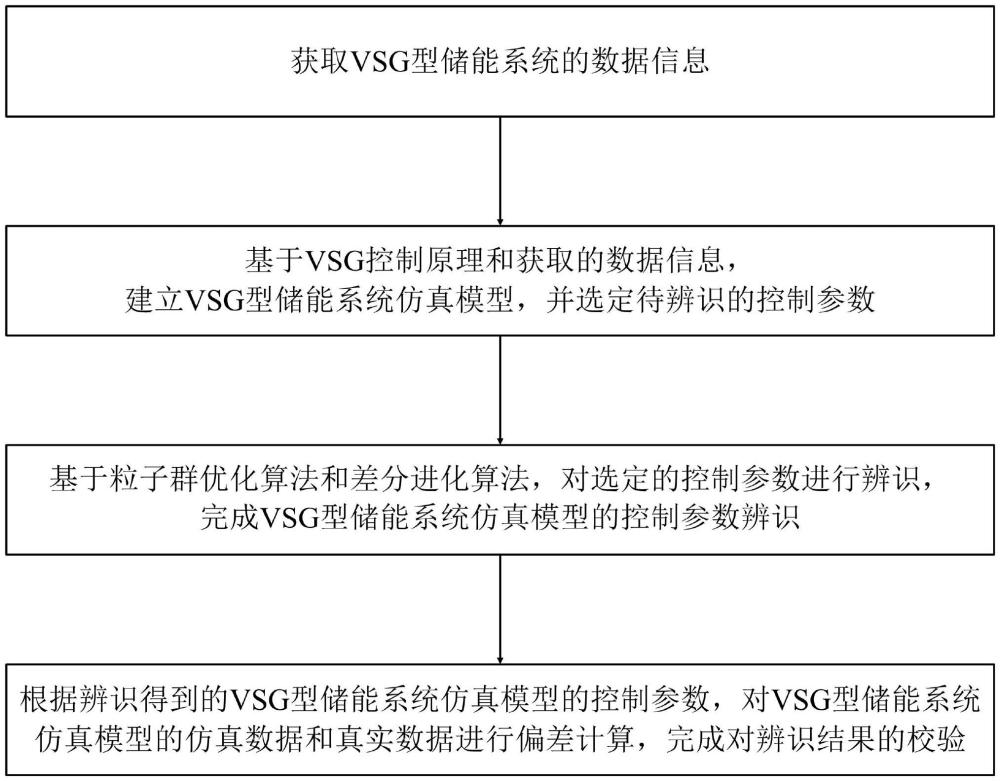
4、s1.获取vsg型储能系统的数据信息;
5、s2.基于vsg控制原理和步骤s1获取的数据信息,建立vsg型储能系统仿真模型,并选定待辨识的控制参数;
6、s3.基于粒子群优化算法和差分进化算法,对步骤s2选定的控制参数进行辨识,完成vsg型储能系统仿真模型的控制参数辨识。
7、所述的vsg型储能系统仿真模型的控制参数辨识方法,还包括如下步骤:
8、s4.根据辨识得到的vsg型储能系统仿真模型的控制参数,对vsg型储能系统仿真模型的仿真数据和真实数据进行偏差计算,完成对辨识结果的校验。
9、所述的对vsg型储能系统仿真模型的仿真数据和真实数据进行偏差计算,具体包括如下步骤:
10、采用如下算式计算得到偏差值f:
11、
12、式中wr为第r工况下的权重值;d为试验测试的工况个数;n为测试数据的长度;ir,j,sim为第r工况下的第j个数据点的仿真值;ir,j,meas为第r工况下的第j个数据点的真实值。
13、所述的完成对辨识结果的校验,具体包括如下步骤:
14、若偏差值f大于设定值,则校验不合格,认定辨识结果无效;
15、若偏差值f小于或等于设定值,则校验合格,认定辨识结果有效;
16、偏差值f越小,则辨识结果越好。
17、步骤s2所述的基于vsg控制原理和步骤s1获取的数据信息,建立vsg型储能系统仿真模型,具体包括如下步骤:
18、转子方程通过功率差控制机械转矩的输出,从而调节频率;同时,采用阻尼功率抑制功率振荡;表示为:
19、
20、式中j为虚拟转动惯量;w为vsg输出电压角频率;wn为电网额定频率;pref为有功功率参考值;p为有功功率;d为阻尼系数;θ为vsg与电网电压相位差;
21、vsg无功功率控制为虚拟励磁调节器,通过母线电压差值和无功功率差值作为反馈,模拟励磁系统得到vsg内电势;表示为:
22、
23、式中e为vsg励磁电动势;qref为无功功率参考值;q为无功功率;kq为无功电压比例系数;δu为电压差值;kpe为无功功率比列系数;kie为无功功率积分系数;uref为电压参考值;u为并网点电压值。
24、步骤s2所述的选定待辨识的控制参数,具体包括如下步骤:
25、选定的待辨识的控制参数包括虚拟转动惯量j、阻尼系数d、无功电压比例系数kq、无功功率比列系数kpe和无功功率积分系数kie。
26、步骤s3所述的基于粒子群优化算法和差分进化算法,对步骤s2选定的控制参数进行辨识,具体包括如下步骤:
27、a.针对粒子群优化算法,初始化算法参数;
28、b.计算当前种群中每个个体的适应度值;
29、c.基于粒子群优化算法,更新每个粒子的位置和速度,并更新得到粒子群种群最优解;同时,基于差分进化算法,对每个粒子进行变异,对变异粒子进行杂交以产生子代个体,并更新得到差分进化种群最优解;
30、d.将步骤c得到的粒子群种群最优解和差分进化种群最优解进行融合,得到当前的种群最优解;
31、e.判断是否达到设定的条件:
32、若达到设定的条件,则终止迭代,将迭代过程中得到的当前的种群最优解中的最优值,作为最终的输出结果,完成对步骤s2选定的控制参数进行辨识;
33、若未达到设定的条件,则返回步骤b,进行下一轮迭代。
34、步骤a所述的初始化算法参数,具体包括如下步骤:
35、初始化粒子群优化算法的算法参数;所述的算法参数包括种群大小、粒子的维度、粒子的位置取值范围、粒子的速度取值范围、总迭代次数、惯性权重、交叉概率和搜索精度。
36、步骤c所述的更新每个粒子的位置和速度,具体包括如下步骤:
37、采用如下算式对粒子的速度进行更新:
38、vs,k+1=wvs,k+c1r1(xbest,k-xs,k)+c2r2(xgbest-xs,k)
39、式中vs,k+1为粒子s在第k+1轮迭代时的粒子速度;w为惯性权重;vs,k为粒子s在第k轮迭代时的粒子速度;c1为第一学习因子;r1为第一随机数,且取值范围为[0,1];xbest,k为在第k轮迭代时的粒子个体最佳位置;xs,k为粒子s在第k轮迭代时的粒子个体位置;c2为第一学习因子;r2为第二随机数,且取值范围为[0,1];xgbest为当前的种群最优解所对应的粒子全局最佳位置;
40、采用如下算式对粒子的位置进行更新:
41、xs,k+1=xs,k+vs,k+1
42、式中xs,k+1为粒子s在第k+1轮迭代时的粒子个体位置。
43、所述的惯性权重,具体包括如下步骤:
44、采用如下算式计算得到惯性权重w:
45、
46、式中wmin为惯性权重的最小值;wmax为惯性权重的最大值;α为设定的控制因子;k为当前的迭代次数;m为最大迭代次数;wave为惯性权重的平均值。
47、步骤c所述的对每个粒子进行变异,对变异粒子进行杂交以产生子代个体,具体包括如下步骤:
48、采用如下算式进行变异操作:
49、hs,k+1=xp1,k+f(xp2,k+xp3,k)
50、式中hs,k+1为粒子s在第k+1轮迭代时变异后的粒子位置;xp1,k为粒子p1在第k轮迭代时的粒子个体位置;xp2,k为粒子p2在第k轮迭代时的粒子个体位置;xp3,k为粒子p3在第k轮迭代时的粒子个体位置;f为变异因子;
51、采用如下算式对变异个体进行二项分布杂交,以产生子代个体:
52、
53、式中l为第三随机数,且取值范围为[0,1];cr为交叉概率;
54、在选择操作中,采用贪婪策略:只有产生的子代个体的适应度值优于父代个体时,才保留产生的子代个体;否则,不保留产生的子代个体,并将父代个体保留。
55、所述的交叉概率,具体包括如下步骤:
56、采用如下算式计算得到交叉概率cr:
57、
58、式中crmax为交叉概率的最大值;js为当前粒子s的适应度值;jmin为当前种群的最小适应度值;jmax为当前种群的最大适应度值;crmin为交叉概率的最小值。
59、步骤d所述的将步骤c得到的粒子群种群最优解和差分进化种群最优解进行融合,得到当前的种群最优解,具体包括如下步骤:
60、根据步骤c得到的粒子群种群最优解pgbset和差分进化种群最优解dgbset,计算粒子群种群最优解适应度值fpg和差分进化种群最优解适应度值fdg;
61、若fdg<fpg,则将差分进化种群最优解dgbset中的粒子按适应度值进行排序,同时将粒子群种群最优解pgbset中的粒子以相同的规则按适应度值进行排序,并依次比较两个种群最优解中的各个粒子的适应度值:
62、若差分进化种群最优解dgbset中的粒子适应度值大于粒子群种群最优解pgbset中的粒子适应度值,则将差分进化种群最优解dgbset中的对应粒子替换粒子群种群最优解pgbset中的对应粒子;
63、若差分进化种群最优解dgbset中的粒子适应度值小于或等于粒子群种群最优解pgbset中的粒子适应度值,则不进行替换;
64、若fdg≥fpg,则直接将粒子群种群最优解pgbset替换为差分进化种群最优解dgbset;
65、将最终得到的粒子群种群最优解作为当前的种群最优解。
66、步骤e所述的判断是否达到设定的条件,具体包括如下步骤:
67、所述的设定的条件,包括是否达到最大迭代次数,以及是否满足设定的搜索精度;
68、达到设定的条件,具体为达到最大迭代次数或者满足设定的搜索精度;
69、未达到设定的条件,具体为未达到最大迭代次数且未满足设定的搜索精度。
70、本发明还提供了一种实现所述vsg型储能系统仿真模型的控制参数辨识方法的系统,包括数据获取模块、参数确定模块、参数辨识模块和参数校验模块;数据获取模块、参数确定模块、参数辨识模块和参数校验模块依次串联;数据获取模块用于获取vsg型储能系统的数据信息,并将数据信息上传参数确定模块;参数确定模块用于根据接收到的数据信息,基于vsg控制原理和获取的数据信息,建立vsg型储能系统仿真模型,选定待辨识的控制参数,并将数据信息上传参数辨识模块;参数辨识模块用于根据接收到的数据信息,基于粒子群优化算法和差分进化算法,对选定的控制参数进行辨识,完成vsg型储能系统仿真模型的控制参数辨识,并将数据信息上传参数校验模块;参数校验模块用于根据接收到的数据信息,根据辨识得到的vsg型储能系统仿真模型的控制参数,对vsg型储能系统仿真模型的仿真数据和真实数据进行偏差计算,完成对辨识结果的校验。
71、本发明提供的这种vsg型储能系统仿真模型的控制参数辨识方法及系统,基于粒子群优化算法和差分进化算法进行控制参数的识别,因此本发明不仅能够完成vsg型储能系统仿真模型的控制参数辨识,而且可靠性更高,精确性更好。
本文地址:https://www.jishuxx.com/zhuanli/20241015/316697.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。