一种基于D滤波器位置重构的双同步电机控制系统及方法与流程
- 国知局
- 2024-10-21 14:29:56
本发明涉及电机控制,尤其涉及一种基于d滤波器位置重构的双同步电机控制系统及方法。
背景技术:
1、近年来,针对工业应用中信号处理的需求,尤其是需要基于信号绝对频率和频率极性进行滤波的情况,双输入/输出滤波器引起了广泛关注。传统滤波器无法实现基于频率极性的选择性过滤功能,而双输入/输出滤波器以其特有的结构设计,具备筛选信号频率极性的独特能力。
2、随着电力电子和电机控制技术的快速进步,高精度、高速响应的电机控制系统在多个行业,如工业自动化、电动汽车动力系统、风力发电站以及航空航天设备中发挥着核心作用。然而,电机运行过程中受到的非线性负载变化、电源波动和电磁干扰等问题,可能导致电流和电压信号中混合有大量高频噪声和低频纹波,这对电机的稳定运行和精确控制带来了挑战。
3、随着滤波器在电机控制系统中的应用逐渐深化,通过在逆变器输出端布置lc滤波器可以减轻谐波影响、提升电机功率因数,而在反馈环节采用数字滤波算法则有助于提取精确的转子位置信息,以提高电机速度和位置控制的精度。对于包含电流环、速度环、位置环等复杂控制结构的伺服系统,正确选择和设计滤波器更是至关重要,需确保每个环节都能达到理想的响应速度和噪声抑制水平。
4、但是,现有的滤波器的性能不够稳定不能够精确获得转子位置信息,达不到高可靠性和高性能控制的理想效果。为了确保每个环节都能达到理想的响应速度和噪声抑制水平,需要一种新型的双输入/输出滤波器实现一种全新的双永磁同步电机高效稳定控制的方法。
技术实现思路
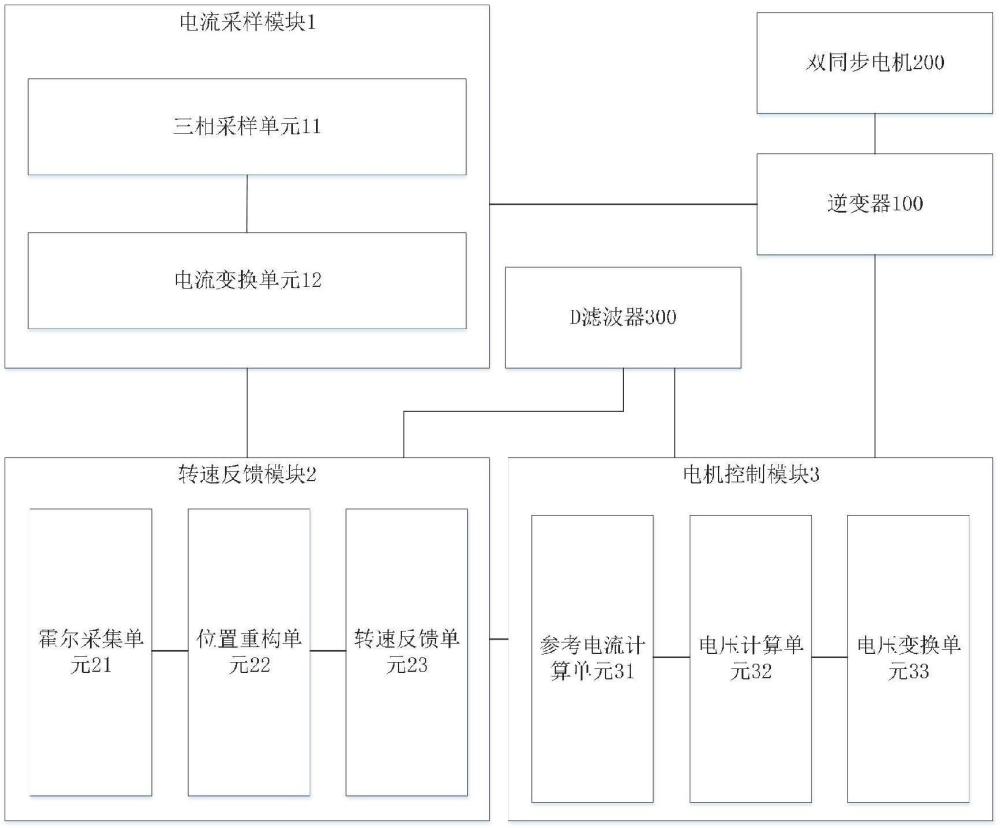
1、针对现有技术中存在的问题,本发明提供一种基于d滤波器位置重构的双同步电机控制系统,包括连接同一个逆变器的两个同步电机,还包括:
2、电流采样模块,连接两个所述同步电机,用于对所述逆变器输出的三相电流采样并经过变换处理得到各所述同步电机的d轴反馈电流和q轴反馈电流;
3、转速反馈模块,连接所述电流采样模块,用于检测任一所述同步电机的霍尔位置信号并且处理得到霍尔矢量,将所述霍尔矢量在αβ平面内的坐标作为d滤波器的双输入,所述d滤波器进行转子位置重构输出所述同步电机的电角度,基于所述电角度处理得到反馈电机转速;
4、电机控制模块,连接所述转速反馈模块和所述逆变器,用于根据给定的参考转速和反馈电机转速处理得到所述同步电机的q轴参考电流,基于给定的d轴参考电流、所述d轴反馈电流、所述q轴参考电流和所述q轴反馈电流得到所述逆变器的占空比以控制各所述同步电机同步运行。
5、优选的,所述电流采集模块包括:
6、三相采样单元,用于采集所述逆变器输出的实时电流并取半得到所述三相电流;
7、电流变换单元,连接所述三相采样单元,用于将所述三相电流进行clark变换得到各所述同步电机的α轴反馈电流和β轴反馈电流,随后将所述α轴反馈电流和所述β轴反馈电流进行clark变换得到各所述同步电机的所述d轴反馈电流和所述q轴反馈电流。
8、优选的,还设有霍尔传感器,分别连接各所述同步电机和所述转速反馈模块,则所述转速反馈模块包括:
9、霍尔采集单元,用于获取所述霍尔传感器检测的霍尔位置信号随后进行变换运算得到在αβ平面内的所述霍尔矢量;
10、位置重构单元,连接所述霍尔采集单元,用于将所述霍尔矢量在所述αβ平面内的α轴坐标和β轴坐标输入所述d滤波器进行转子位置重构得到各所述同步电机的所述电角度;
11、转速反馈单元,连接所述位置重构单元,用于将所述电角度微分得到所述同步电机的电速度,随后将所述电速度除以所述同步电机的极对数得到所述同步电机的机械角速度,将所述机械角速度经过单位转换得到所述反馈电机转速。
12、优选的,所述电机控制模块包括:
13、参考电流计算单元,用于计算所述参考转速和所述反馈电机转速之间的所述转速误差,随后将所述转速误差经过pi控制得到所述q轴参考电流;
14、电压计算单元,连接所述参考电流计算单元,用于计算所述d轴参考电流和所述d轴反馈电流的差值随后进行pi控制得到所述d轴控制电压,以及计算所述q轴参考电流和所述q轴反馈电流的差值随后进行pi控制得到所述q轴控制电压;
15、电压变换单元,连接所述电压计算单元,用于将所述q轴控制电压和所述d轴控制电压进行反park变换得到α轴控制电压和β轴控制电压,基于所述α轴控制电压和所述β轴控制电压进行脉宽调制计算出所述逆变器中包含的功率开关的所述占空比,所述逆变器根据所述占空比导通各所述功率开关输出期望电压矢量控制各所述同步电机同步运行。
16、优选的,所述d滤波器的构建过程包括:
17、先定义基本矩阵得到d滤波器因子,基于所述d滤波器因子建立双输入双输出的基础系统,随后基于单输入单输出滤波器和所述基础系统分析得到单输入单输出滤波器和双输入双输出滤波器之间的系统关系,随后将所述双输入双输出滤波器的滤波器因子替换为所述d滤波器因子得到双输入双输出的所述d滤波器;
18、以所述霍尔矢量在αβ平面内的坐标作为d滤波器的双输入,以所述d滤波器根据所述霍尔矢量在αβ平面内的坐标进行转子位置重构得到的所述同步电机的电角度作为所述d滤波器的输出。
19、优选的,所述d滤波器表示为:
20、y=f(d(s,ω))u;
21、其中,u为所述d滤波器的输入,y为所述d滤波器的输出,d(s,ω)为所述d滤波因子;
22、
23、其中,ω为标量偏移信号;s为微分算子;i为2阶单位矩阵
24、j为2阶斜对称矩阵
25、本发明还提供一种基于d滤波器位置重构的双同步电机控制方法,应用于上述的双同步电机控制系统,包括:
26、步骤s1,所述双同步电机控制系统对所述逆变器输出的三相电流采样并经过变换处理得到各所述同步电机的d轴反馈电流和q轴反馈电流;
27、步骤s2,所述双同步电机控制系统检测任一所述同步电机的霍尔位置信号并且处理得到霍尔矢量,将所述霍尔矢量在αβ平面内的坐标作为d滤波器的双输入,所述d滤波器进行转子位置重构输出所述同步电机的电角度,基于所述电角度处理得到反馈电机转速;
28、步骤s3,所述双同步电机控制系统根据给定的参考转速和反馈电机转速处理得到所述同步电机的q轴参考电流,基于给定的d轴参考电流、所述d轴反馈电流、所述q轴参考电流和所述q轴反馈电流得到所述逆变器的占空比以控制各所述同步电机同步运行。
29、优选的,所述步骤s1包括:
30、步骤s11,所述双同步电机控制系统采集所述逆变器输出的实时电流并取半得到所述三相电流;
31、步骤s12,所述双同步电机控制系统将所述三相电流进行clark变换得到各所述同步电机的α轴反馈电流和β轴反馈电流,随后将所述α轴反馈电流和所述β轴反馈电流进行clark变换得到各所述同步电机的所述d轴反馈电流和所述q轴反馈电流。
32、优选的,还设有霍尔传感器,分别连接各所述同步电机,则所述步骤s2包括:
33、霍尔采集单元,用于获取所述霍尔传感器检测的霍尔位置信号随后进行变换运算得到在αβ平面内的所述霍尔矢量;
34、步骤s21,所述双同步电机控制系统将所述霍尔矢量在所述αβ平面内的α轴坐标和β轴坐标输入所述d滤波器进行转子位置重构得到各所述同步电机的所述电角度;
35、步骤s22,所述双同步电机控制系统将所述电角度微分得到所述同步电机的电速度,随后将所述电速度除以所述同步电机的极对数得到所述同步电机的机械角速度,将所述机械角速度经过单位转换得到所述反馈电机转速。
36、优选的,所述步骤s3包括:
37、步骤s31,所述双同步电机控制系统计算所述参考转速和所述反馈电机转速之间的所述转速误差,随后将所述转速误差经过pi控制得到所述q轴参考电流;
38、步骤s32,所述双同步电机控制系统计算所述d轴参考电流和所述d轴反馈电流的差值随后进行pi控制得到所述d轴控制电压,以及计算所述q轴参考电流和所述q轴反馈电流的差值随后进行pi控制得到所述q轴控制电压;
39、步骤s33,所述双同步电机控制系统将所述q轴控制电压和所述d轴控制电压进行反park变换得到α轴控制电压和β轴控制电压,基于所述α轴控制电压和所述β轴控制电压进行脉宽调制计算出所述逆变器中包含的功率开关的所述占空比,所述逆变器根据所述占空比导通各所述功率开关输出期望电压矢量控制各所述同步电机同步运行。
40、上述技术方案具有如下优点或有益效果:
41、1)d滤波器具备稳定的性能,特别适合应用于三相交流电机的同步控制中,它可以有效地区分并分离霍尔矢量的两路信号中的正负频率成分,能够实时准确地获取电机转子位置。
42、2)采用d滤波器可高效实现双电机的同步协调运行,利用d滤波器的独特优势实现了对控制双同步电机的低成本、高可靠性和高性能控制,为电机控制领域的技术创新提供了有力支持。
本文地址:https://www.jishuxx.com/zhuanli/20241021/318383.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表