一种高精度基坑位移数据处理方法与流程
- 国知局
- 2024-11-06 14:24:31
本发明涉及土木工程,具体而言,涉及一种高精度基坑位移数据处理方法。
背景技术:
1、基坑监测是基坑工程施工中的一个重要环节,是指在基坑开挖及地下工程施工过程中,对基坑岩土形状、支护结构和周围环境变化进行各种观察及分析工作,并将监测结果及时反馈,预测进一步施工后将导致的变形及稳定状态的发展,根据预测判定施工对周围环境造成影响的程度,来指导设计与施工。由于基坑工程中岩土问题的不确定性、复杂性较强,基坑位移过大甚至垮塌的安全事故频发;当几十米深的基坑邻近建筑物、地铁、市政道路、地下管线时,更会对这些周边环境造成很大风险,一旦发生安全事故则会严重危及人民生命财产安全。因基坑失稳前支护结构位移和地面沉降等特征的状态是有预兆的,所以施工过程中对其进行监测是及时发现与控制基坑安全风险的有效方法。
2、申请号为cn202210272005.4的专利文件中公开了一种高精度基坑位移监测方法及监测系统,该专利的技术方案将卫星的周期性波动信息应用到gps定位上,细化了定位监测的计算过程,将采集的数据进行分割得到n个子时段的差分定位结果,根据每个监测时间区间同一时刻的卫星周期性和卫星信号质量构建差分矩阵d,然后将差分矩阵d向量化得到向量y,再将向量y进行卡尔曼滤波得到基坑的位移检测结果,从而实现测量站和基准站相应子时段的定位数据文件进行解算,获得高精度基坑位移结果。但是该专利的技术方案在针对突变信号和噪声消除效果上仍然有所欠缺。
技术实现思路
1、本发明要解决的技术问题是:本发明提供一种高精度基坑位移数据处理方法,可以针对突变信号更有效的实时跟随,且能够有效消除噪声,最终获得的基坑位移检测结果更准确。
2、本发明提供一种高精度基坑位移数据处理方法,包括以下步骤:
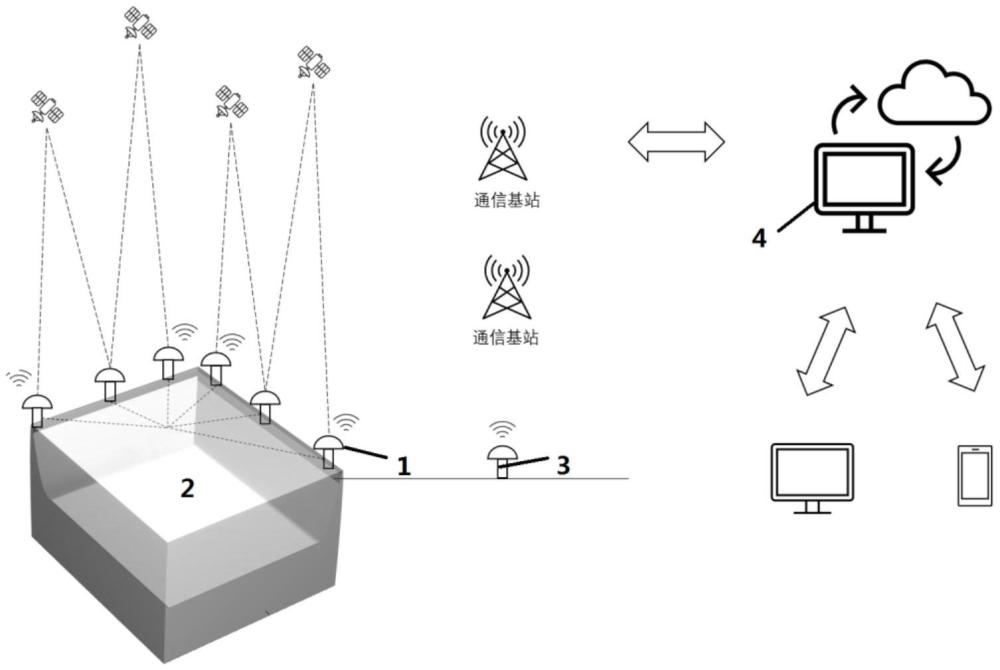
3、s1、将测量站布设在基坑的坑边,将基准站设在远离基坑、地势空旷且岩土稳定的区域;
4、s2、测量站和基准站按照采集策略分别接收卫星的卫星定位信号,分别解析为定位数据文件和基准定位数据文件,并将定位数据文件和基准定位数据文件传输给云端服务器;
5、s3、云端服务器解算测量站与基准站之间的差分定位结果,将预设监测时间区间内的差分定位结果按照周期t分割成n个子时段,得到含n个子时段差分定位结果的差分定位集合k,差分定位集合k为:
6、
7、式中,pos表示每个计时单位的差分定位结果,li表示对i个子时段内所有pos的平均值,1≤i≤n,预设监测时间区间为每天;
8、s4、对集合k进行高斯平滑滤波处理,以去除存在偏差的异常点,得到差分定位集合l;
9、s5、对集合l进行信号保持滤波处理以去除噪声,得到差分定位集合m;
10、s6、对集合m进行卡尔曼滤波处理,得到基坑位移检测结果n。
11、本申请与现有技术相比,具有以下优点:通过高斯平滑滤波处理,能够具有更好的实时跟随效果,然后去除噪声,这样在稳定期数据波动更小,最终获得的基坑位移检测结果更准确。
12、在一种可能的实施方式中,步骤s4具体包括以下步骤:
13、s41、通过下式构建高斯模板:
14、
15、其中,g(x)表示高斯函数,a代表高斯函数曲线的高度,b代表高斯函数曲线的中心,c代表高斯函数曲线的宽度;
16、s42、通过下式使得高斯函数曲线离散化:
17、
18、其中,高斯模板的窗口宽度为2d+1;
19、s43、通过下式使得高斯函数曲线归一化,得到归一化后的高斯模板:
20、
21、其中,norm_g(i)表示归一化函数;
22、s44、通过下式对归一化后的高斯模板以及集合k进行平滑滤波处理,得到集合l:
23、
24、其中,l(j)表示集合l。
25、与现有技术相比,采用上述技术方案能够有效地去除随机噪声,边缘保持相对较好、参数可调、计算效率高、适用性广且数学性质优良,利于实际使用。
26、在一种可能的实施方式中,步骤s5包括以下步骤:
27、s51、定义信号保持滤波窗口宽度为2u+1,则通过下式计算均值矩阵d:
28、
29、s52、通过下式计算方差矩阵e:
30、e(i)=|li-d(i)|2;
31、s53、通过下式计算方差均值矩阵f:
32、
33、s54、定义阈值τ,则集合l中的元素对应下式:
34、
35、s55、根据步骤s54中判断为噪声的点,则将对应的l(i)值替换为d(i),将滤波处理后的集合l定义为差分定位集合m。
36、与现有技术相比,采用上述技术方案能够有效去除噪声,使得最终获得的基坑位移检测结果n更加准确。
37、在一种可能的实施方式中,步骤s6包括以下步骤:
38、s61、通过下式构建卡尔曼滤波模型:
39、x(i)=ax(i-1)+bw
40、y(i)=cx(i)+v;
41、其中,x(i)为卡尔曼滤波的输出值,y(i)为第i个测量值,w是均值为0且方差为p的白噪声,v是均值为0且方差为q的白噪声;a是状态转移矩阵,b是控制输入矩阵,c是状态观测矩阵,
42、s62、将y(i)经过整数次迭代处理,获得基坑位移检测结果n。
43、与现有技术相比,采用上述技术方案的卡尔曼滤波模型计算效率高、实时性强,能够实现最优估计,利于给出准确的结果。
技术特征:1.一种高精度基坑位移数据处理方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的高精度基坑位移数据处理方法,其特征在于,所述步骤s4具体包括以下步骤:
3.根据权利要求1或2所述的高精度基坑位移数据处理方法,其特征在于,所述步骤s5包括以下步骤:
4.根据权利要求1或2所述的高精度基坑位移数据处理方法,其特征在于,所述步骤s6包括以下步骤:
技术总结本发明提供一种高精度基坑位移数据处理方法,包括:将测量站布设在基坑的坑边,基准站设在远离基坑、地势空旷且岩土稳定的区域;测量站和基准站分别接收卫星的卫星定位信号,并解析后传输给云端服务器;云端服务器解算测量站与基准站之间的差分定位结果,将预设监测时间区间内的差分定位结果按照周期T分割成n个子时段,得到含n个子时段差分定位结果的差分定位集合K;对集合K进行高斯平滑滤波处理,以去除存在偏差的异常点,得到差分定位集合L;对集合L进行信号保持滤波处理以去除噪声,得到差分定位集合M;对集合M进行卡尔曼滤波处理,得到基坑位移检测结果N;本发明针对突变信号更有效的实时跟随,有效消除噪声,结果更准确。技术研发人员:蔡浩原,冯钰桐,刘世丹受保护的技术使用者:浙江星地互联技术有限公司技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/321887.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。