一种阻截警力实时调度方法及可读储存介质
- 国知局
- 2024-11-06 14:44:21
本发明涉及阻截警力实时调度,具体涉及一种阻截警力实时调度方法及系统。
背景技术:
1、随着卫星导航和实时追踪技术的飞速发展,这些技术已经广泛应用于各个领域,特别是在军事和公安领域,对于目标的精确跟踪和快速响应显得尤为重要。在公安工作中,有效追踪和阻截犯罪嫌疑人、危险分子或逃犯,是保障公共安全和维护社会秩序的关键环节。然而,在现有的阻截警力实时调度方法中,尽管已经引入了卫星导航和实时追踪技术,但在针对特定目标进行阻截时,尚缺乏专门设计的调度模型。传统的调度方法往往依赖于增加警力进行堵截,这种方法虽然在一定程度上能够提高阻截的成功率,但往往难以实现对整体警力的高效、实时调度,从而影响阻截行动的效率和严密性。具体来说,现有调度方法主要存在以下问题:一是缺乏针对阻截目标的精准调度模型,导致警力部署不够科学、合理;二是无法实时获取和分析追踪目标的动态信息,难以对警力部署进行及时调整;三是缺乏对警力资源的优化配置,使得警力使用效率不高,难以满足复杂多变的追踪和阻截需求。因此,开发一种能够针对拦截情况下对警力进行精准调度、实时响应、高效配置的阻截警力实时调度模型,对于提高公安工作的效率和效果具有重要意义。这样的模型不仅能够实现对追踪目标的快速、准确阻截,还能够优化警力资源配置,提高工作的整体效能。
技术实现思路
1、本发明的主要目的是提供一种阻截警力实时调度方法及系统,旨在解决现有没有能够针对拦截情况下对警力进行精准调度、实时响应、高效配置的阻截警力实时调度模型的问题。
2、为实现上述目的,本发明提出的阻截警力实时调度方法包括如下步骤:
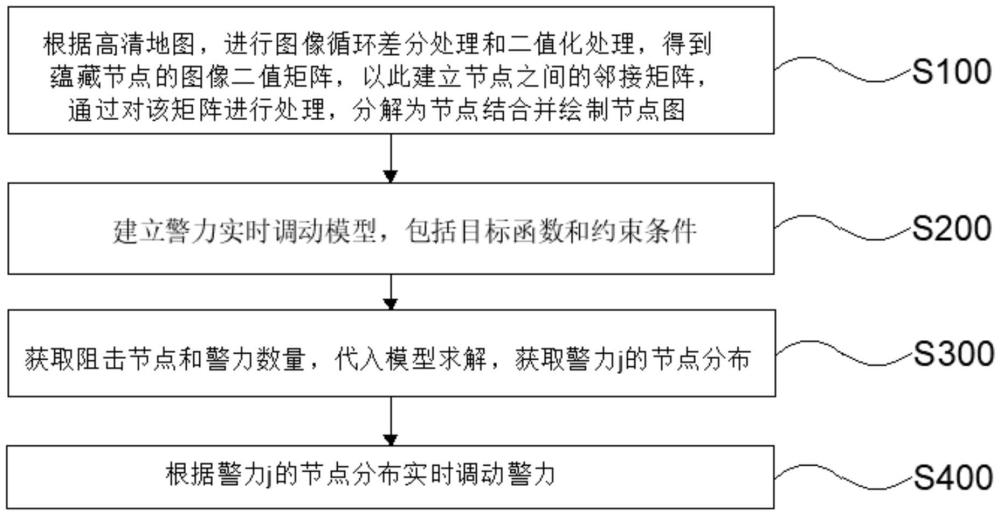
3、根据高清地图,进行图像循环差分处理和二值化处理,得到蕴藏节点的图像二值矩阵,以此建立节点之间的邻接矩阵,通过对该矩阵进行处理,分解为节点结合并绘制节点图;
4、建立警力实时调动模型,包括:
5、目标函数:
6、
7、约束条件包括:
8、
9、xij∈{0,1};
10、
11、i=1,2,3,…,m;j=1,2,3,…,n;
12、其中:wj表示第j处警力的工作量,表示所有警力的平均工作量,
13、表示可以管辖非阻击节点的警力,xij=1时表示第i个节点可以被警力j管辖,xij=0时表示第i个节点不被警力j管辖;
14、获取阻击节点和警力数量,代入模型求解,获取警力j的节点分布;
15、根据警力j的节点分布实时调动警力。
16、优选地,所述约束条件还包括:
17、
18、其中:sij表示第j个警力到第i个节点的距离;vj表示警力j的移动速度;tk表示出警时间常数。
19、优选地,所述警力的工作量为该警力管辖范围内各节点日常节点发案率的总和:
20、
21、其中:c i表示节点i的年案发率,wj表示第j处警力的工作量。
22、优选地,所述根据高清地图,进行图像循环差分处理和二值化处理,得到蕴藏节点的图像二值矩阵,以此建立节点之间的邻接矩阵,通过对该矩阵进行处理,分解为节点结合并绘制节点图的步骤,包括:
23、将北斗定位地理信息基于转化为由节点构成的图数据,北斗导航系统能给予实时定位高清图像;
24、将定位的高清图像经图像滤波器进行滤波,经灰度变换形成灰度图像,在通过灰度图像像素在区间[0,255]进行图像增强叠加运算、图像减弱作差运算,二者进行图像循环差分处理;
25、初步得到含交通网的节点,再经过边缘算子进行形态学滤波,获取只剩下节点的各图像,经过图像二值化处理,得到蕴藏节点的图像二值矩阵,经矩阵降维和比例缩放,以此建立节点之间的邻接矩阵,通过对该矩阵进行处理,分解为节点结合并绘制节点图。
26、优选地,所述目标函数还包括:
27、
28、其中:sij表示第j个警力到第i个节点的距离;vj表示警力j的移动速度。
29、优选地,所述获取阻击节点和警力数量,代入模型求解,获取警力j的节点分布的步骤,包括
30、获取阻击节点、非阻击节点和警力数量。
31、将所有的实时调动模型的解进行二进制编码创建连续空间;
32、利用粒子群算法,获取实时调动模型的最优解。
33、优选地,所述利用粒子群算法,获取实时调动模型的最优解的步骤包括:
34、初始化粒子种群,初始化种群中所有粒子的速度和位置;
35、根据适应度函数对粒子种群进行评价;
36、更新粒子的个体极值,更新粒子的群体极值;
37、根据更新的粒子的个体极值和群体极值,再次进行速度和位置的迭代;
38、判断是否满足停止迭代条件;
39、若是,则返回至更新粒子的个体极值和更新粒子的群体极值步骤;
40、若否,则退出迭代,获取实时调动模型的最优解。
41、优选地,所述初始化粒子种群,初始化种群中所有粒子的速度和位置的步骤包括:
42、初始化粒子种群:粒子数量为20-40,个体学习因子为1-3,社会学习因子为1-3,惯性权重为0.8-0.9,迭代次数为30-60,粒子最大速度为1-1.4;随机初始化种群中所有粒子的速度和位置。
43、优选地,一种可读储存介质,其特征在于,可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上任一项所述的一种阻截警力实时调度方法。
44、本发明的技术方案中,建立基于0-1规划模型的警力分布优化模型,为拦截情况下对警力调动作出基于数据分析的决策,在约束条件下,保证在原有节点都有警力管辖,防止由于阻截行动导致的警力空洞,导致其他恶性事件发生,同时保证阻截节点的警力最多以保证阻截行动的成功,同时尽可能的平衡各个警力的工作量,提高工作的整体效能。
技术特征:1.一种阻截警力实时调度方法,其特征在于,包括如下步骤:
2.如权利要求1所述的阻截警力实时调度方法,其特征在于,所述约束条件还包括:
3.如权利要求1所述的阻截警力实时调度方法,其特征在于,所述警力的工作量为该警力管辖范围内各节点日常节点发案率的总和:
4.如权利要求1所述的阻截警力实时调度方法,其特征在于,所述根据高清地图,进行图像循环差分处理和二值化处理,得到蕴藏节点的图像二值矩阵,以此建立节点之间的邻接矩阵,通过对该矩阵进行处理,分解为节点结合并绘制节点图的步骤,包括:
5.如权利要求1所述的阻截警力实时调度方法,其特征在于,所述目标函数还包括:
6.如权利要求1-5中任一所述的阻截警力实时调度方法,其特征在于,所述获取阻击节点和警力数量,代入模型求解,获取警力j的节点分布的步骤,包括
7.如权利要求6所述的一种阻截警力实时调度方法,其特征在于,所述利用粒子群算法,获取实时调动模型的最优解的步骤包括:
8.如权利要求7所述的一种阻截警力实时调度方法,其特征在于,所述初始化粒子种群,初始化种群中所有粒子的速度和位置的步骤包括:
9.一种可读储存介质,其特征在于,一种可读储存介质,其特征在于,可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至8中任一项所述的一种阻截警力实时调度方法。
技术总结本发明公开一种阻截警力实时调度方法及系统,包括如下步骤:根据高清地图,进行图像循环差分处理和二值化处理,得到蕴藏节点的图像二值矩阵,以此建立节点之间的邻接矩阵,通过对该矩阵进行处理,分解为节点结合并绘制节点图;建立警力实时调动模型,获取阻击节点和警力数量,代入模型求解,获取警力j的节点分布;根据警力j的节点分布实时调动警力。发明的技术方案中,建立基于0‑1规划模型的警力分布优化模型,为拦截情况下对警力调动作出基于数据分析的决策,在约束条件下,保证在原有节点都有警力管辖,防止由于阻截行动导致的警力空洞,同时保证阻截节点的警力最多以保证阻截行动的成功,提高工作的整体效能。技术研发人员:刘懿,梁智,刘浩受保护的技术使用者:湖南人文科技学院技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/323859.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表