一种基于无人机的农机作业规划方法及系统
- 国知局
- 2024-11-18 18:15:35
本发明涉及农作规划的,具体为一种基于无人机的农机作业规划方法及系统。
背景技术:
1、在当今农业生产的现代化进程中,科技的应用日益显著。随着航空遥感技术和无人机技术的迅速发展,无人机作为一种高效获取空中信息的工具,已经广泛应用于农业领域。特别是在农机作业规划中,利用无人机搭载的多种传感器,可以实时捕捉和分析田地里的图像。
2、然而,尽管基于无人机的农机作业规划方法带来了诸多优势,但也存在一些现有技术无法克服的挑战和不足之处。首先,在复杂地形如梯田等区域,现有的图像处理与分析在处理效率和准确性上仍然面临挑战,特别是对于梯田这种具有多级地形变化的地形,需要更高级别的算法来确保准确的地形分类和作业规划,其次,需要考虑到梯田内各区域的内在条件状况,从而综合分析出梯田状态对农机作业时的影响。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于无人机的农机作业规划方法及系统,解决了上述背景技术中的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种基于无人机的农机作业规划方法,包括以下步骤,
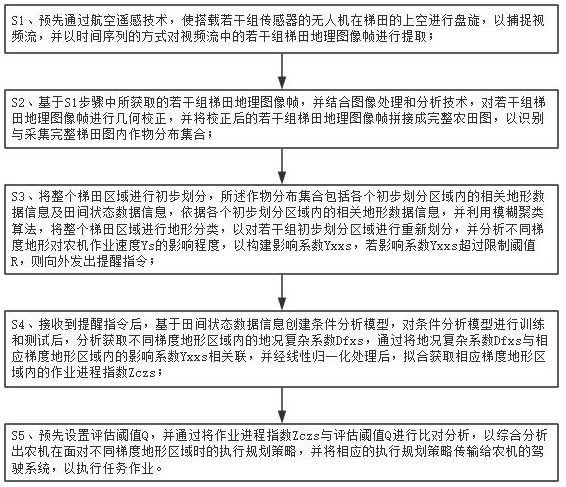
3、s1、预先通过航空遥感技术,使搭载若干组传感器的无人机在梯田的上空进行盘旋,以捕捉视频流,并以时间序列的方式对视频流中的若干组梯田地理图像帧进行提取;
4、s2、基于s1步骤中所获取的若干组梯田地理图像帧,并结合图像处理和分析技术,对若干组梯田地理图像帧进行几何校正,并将校正后的若干组梯田地理图像帧拼接成完整农田图,以识别与采集完整梯田图内作物分布集合;
5、s3、将整个梯田区域进行初步划分,所述作物分布集合包括各个初步划分区域内的相关地形数据信息及田间状态数据信息,依据各个初步划分区域内的相关地形数据信息,并利用模糊聚类算法,将整个梯田区域进行地形分类,以对若干组初步划分区域进行重新划分,并分析不同梯度地形对农机作业速度ys的影响程度,以构建影响系数yxxs,若影响系数yxxs超过限制阈值r,则向外发出提醒指令;
6、s4、接收到提醒指令后,基于田间状态数据信息创建条件分析模型,对条件分析模型进行训练和测试后,分析获取不同梯度地形区域内的地况复杂系数dfxs,通过将地况复杂系数dfxs与相应梯度地形区域内的影响系数yxxs相关联,并经线性归一化处理后,拟合获取相应梯度地形区域内的作业进程指数zczs;
7、s5、预先设置评估阈值q,并通过将作业进程指数zczs与评估阈值q进行比对分析,以综合分析出农机在面对不同梯度地形区域时的执行规划策略,并将相应的执行规划策略传输给农机的驾驶系统,以执行任务作业。
8、优选的,s1具体包括以下步骤:
9、s11、使用无人机在梯田的上空进行盘旋,并根据无人机内搭载的若干组传感器来捕捉连续性的视频流,其中,若干组传感器包括光学摄影传感器、热红外传感器以及雷达传感器,同时无人机内设置有gps以及惯性测量单元;
10、s12、使用视频处理软件从连续性的视频流中提取单独的梯田地理图像帧,并根据视频流的帧率设定提取频率,再将提取的若干组梯田地理图像帧保存到云存储中。
11、优选的,s2具体包括以下步骤:
12、s21、首先对若干组梯田地理图像帧进行几何校正,接着利用小波去噪技术,以通过小波变换来分解若干组梯田地理图像帧中的数据信息,并在小波域中去除噪声分量,同时通过图像增强技术提取图像帧中的关键特征信息,识别和分析图像中的农作物分布;
13、s22、依据视频流的拍摄顺序对连续的梯田地理图像帧按照对应的顺序进行依次排序,通过ransac算法计算田地理图像帧之间的单应性矩阵,并使用单应性矩阵将田地理图像帧进行透视变换,以拼接成完整农田图。
14、优选的,s3具体包括以下步骤:
15、s31、根据s22步骤中所获取的完整农田图,将实际梯田区域划分为若干组初步划分区域,各个初步划分区域面积相等;
16、s32、所述作物分布集合包括各个初步划分区域内的相关地形数据信息及田间状态数据信息;
17、s321、各个初步划分区域内的相关地形数据信息包括各个初步划分区域内的坡度值pdz及高程;
18、s322、田间状态数据信息包括各个区间内的湿度及平整度,并通过统计学算法,分别计算出相邻区域间的湿度差值sdzjc、整个梯田内湿度差值的均值sdzavg、相邻区域间的平整差异值pccjc及整个梯田内平整差异值的均值pccavg。
19、优选的,s3还包括有:
20、s33、依据各个初步划分区域内的相关地形数据信息,并利用模糊聚类算法,将梯度地形划分为三组模糊集合,所述三组模糊集合包括平缓梯度等级、中等梯度等级及陡峭梯度等级;
21、s331、并使用模糊c均值聚类算法,以计算获取聚类中心值来将整个梯田区域进行地形分类,具体以为例按照以下方式获取:
22、
23、式中,表示第k坡度等级下的聚类中心值,反映在第k坡度等级下的聚类坡度值均值;n表示为整个梯田区域内采集到不同坡度值的位置数量,i=1、2、3、...、n,pdzi表示为第i位置上的坡度值,yik表示为第i位置上的坡度值对在第k坡度等级下的聚类坡度值均值的隶属度,隶属度yik根据坡度值到各聚类坡度值均值的距离进行更新,距离越近,隶属度越高;
24、s332、第i位置上的坡度值对在第k坡度等级下的聚类坡度值均值的隶属度yik通过以下公式获取:
25、
26、式中,c表示为模糊化指数,是控制隶属度模糊程度的参数,且c>1,m表示将梯度地形划分为不同坡度等级的数量,k=1、2、...、m,表示为第k坡度等级下的聚类中心值,表示为在第z坡度等级下的聚类中心值,反映出该坡度等级的中心特征,表示为pdzi与之间的欧几里得距离,表示为pdzi与之间的欧几里得距离;
27、s333、预先设置划分阈值,并将聚类中心值与划分阈值进行比对分析,获取梯度地形划分的划分标准,具体内容如下:
28、若聚类中心值大于划分阈值时,此时将定义为陡峭梯度等级;
29、若聚类中心值等于划分阈值时,此时将定义为中等梯度等级;
30、若聚类中心值小于划分阈值时,此时将定义为平缓梯度等级;
31、s334、根据s333步骤中的划分标准,重新对若干组初步划分区域进行划分,此时分别将按照陡峭梯度等级、中等梯度等级及平缓梯度等级来对整个梯田区域进行区域划分,并分别标记为第一区域、第二区域、第三区域、...、第p区域。
32、优选的,s3还包括有:
33、s33、根据重新划分的梯田区域,分析不同梯度地形对农机作业速度ys的影响程度,以构建影响系数yxxs,所述影响系数yxxs通过以下公式获取:
34、
35、式中,yxxs表示为构建影响系数,ys0表示为在地形梯度为0时的作业速度,第k坡度等级下的聚类中心值,a1及a2均为权重系数;
36、s331、通过将影响系数yxxs与预先设置的限制阈值r进行比较,初步判断是否需向外发出提醒指令,若影响系数yxxs超过限制阈值r,则向外发出提醒指令,若影响系数yxxs未超过限制阈值r,则暂不向外发出提醒指令。
37、优选的,s4具体包括以下步骤:
38、s41、使用卷积神经网络构建初始模型,并以田间状态数据信息对初始模型进行训练和测试,并将训练后的初始模型作为状态识别模型,分别获取状态识别模型内的特征信息,并将获取的特征信息对状态识别模型进行训练和测试,结合所接收到的提醒指令,将训练后的状态识别模型作为条件分析模型;
39、s411、基于条件分析模型,分析获取不同梯度地形区域内的地况复杂系数dfxs:
40、
41、式中,α及β均为权重系数,p表示为重新划分的区域数量,j=1、2、3、...、p,sdzjc表示为相邻区域间的湿度差值,sdzavg表示为整个梯田内湿度差值的均值,pccjc表示为相邻区域间的平整差异值,pccavg表示为整个梯田内平整差异值的均值。
42、优选的,s4还包括有:
43、s42、通过将地况复杂系数dfxs与相应梯度地形区域内的影响系数yxxs相关联,并经线性归一化处理后,拟合获取相应梯度地形区域内的作业进程指数zczs,具体按照以下公式获取:
44、
45、式中,zzmd表示为种植密度,dfxs表示为地况复杂系数,yxxs表示为相应梯度地形区域内的影响系数,f1表示为相应梯度地形区域内的影响系数yxxs的权重系数,f2表示为地况复杂系数dfxs的权重系数,f3表示为种植密度zzmd的权重系数,x表示为修正常数,通过地况复杂系数dfxs、相应梯度地形区域内的影响系数yxxs及种植密度zzmd的计算,分析出相应梯度地形区域内农机作业进程的安排状况。
46、优选的,s5、通过将作业进程指数zczs与评估阈值q进行比对分析,以综合分析出农机在面对不同梯度地形区域时的执行规划策略,具体内容如下:
47、若作业进程指数zczs≥评估阈值q时,表明农机在当前梯田地形区域内的作业执行效率处于正常状态,此时将提高农机的作业速度,以加快作业进程,节省时间成本,根据作物分布优化作业路径,减少转弯频率和重复作业,进一步提高作业效率;
48、若作业进程指数zczs<评估阈值q时,表明农机在当前梯田地形区域内的作业执行效率处于非正常状态,此时将保持当前农机的作业速度,以确保作业质量和安全性。
49、一种基于无人机的农机作业规划系统,包括捕捉模块、处理模块、区域划分模块、初步分析模块、综合分析模块及规划模块;
50、捕捉模块,预先通过航空遥感技术,使搭载若干组传感器的无人机在梯田的上空进行盘旋,以捕捉视频流,并以时间序列的方式对视频流中的若干组梯田地理图像帧进行提取;
51、处理模块,基于若干组梯田地理图像帧,并结合图像处理和分析技术,对若干组梯田地理图像帧进行几何校正,并将校正后的若干组梯田地理图像帧拼接成完整农田图,以识别与采集完整梯田图内作物分布集合;
52、区域划分模块,将整个梯田区域进行初步划分,所述作物分布集合包括各个初步划分区域内的相关地形数据信息及田间状态数据信息,依据各个初步划分区域内的相关地形数据信息,并利用模糊聚类算法,将整个梯田区域进行地形分类,以对若干组初步划分区域进行重新划分;
53、初步分析模块,分析不同梯度地形对农机作业速度ys的影响程度,以构建影响系数yxxs,若影响系数yxxs超过限制阈值r,则向外发出提醒指令;
54、综合分析模块,接收到提醒指令后,基于田间状态数据信息创建条件分析模型,对条件分析模型进行训练和测试后,分析获取不同梯度地形区域内的地况复杂系数dfxs,通过将地况复杂系数dfxs与相应梯度地形区域内的影响系数yxxs相关联,并经线性归一化处理后,拟合获取相应梯度地形区域内的作业进程指数zczs;
55、规划模块,预先设置评估阈值q,并通过将作业进程指数zczs与评估阈值q进行比对分析,以综合分析出农机在面对不同梯度地形区域时的执行规划策略,并将相应的执行规划策略传输给农机的驾驶系统,以执行任务作业。
56、本发明提供了一种基于无人机的农机作业规划方法及系统,具备以下有益效果:
57、(1)基于所获取的地理图像帧,形成完整的农田图,这一步骤有助于识别和采集完整梯田图内的作物分布集合,为农田管理和作业提供了精确的空间信息;并利用模糊聚类算法对梯田区域进行地形分类,分析不同梯度地形对农机作业速度的影响程度,并构建相应的影响系数yxxs,这一过程提供了基于实际地形条件的作业速度优化策略,从而提高作业效率和农田资源的利用率。基于田间状态数据信息,创建和训练条件分析模型,分析和获取不同梯度地形区域内的地况复杂系数dfxs,以掌握不同区域内条件状况,最终通过得到的作业进程指数zczs,不仅能够量化地形复杂度对作业效率的影响,还能为决策提供科学依据,同时综合分析农机在不同梯度地形区域的执行规划策略。将优化的执行规划策略实时传输给农机的驾驶系统,使农机能够智能化地执行任务作业,提高作业效率和农田资源的利用效率。总之,该方法不仅能够对梯田的不同梯度进行分类,还能进一步通过分类后的田地,分析对农机作业时的影响,从而实现对农田管理进行智能化处理,确保农业生产的精准性和效率性。
58、(2)通过对梯田地形和作物分布的精确理解,结合模糊聚类算法对地形进行的重新分类和影响系数yxxs的构建,能够评估不同地形对农机作业的复杂度和执行效率的影响,以便优化农机的作业路径和速度规划,这样可以进一步减少作业中的重复和浪费,提高农机作业的效率和资源利用率。
59、(3)使用卷积神经网络构建初始模型,利用田间状态数据信息对初始模型进行训练和测试,训练后的初始模型作为状态识别模型,用于获取不同梯田地形区域内的特征信息,并进一步对状态识别模型进行训练和测试,以提高模型的准确性和适应性,这一步骤确保了状态识别模型能够有效地反映农田内部的实际状态。通过计算作业进程指数zczs,系统能够精确评估不同地形条件下农机作业的效率和安全性,这种精准化的评估和分析帮助农业管理者优化农机作业路径和速度规划,提高作业效率和减少资源浪费。
60、(4)系统能够根据不同梯田地形区域的实际情况,动态调整农机的作业速度和路径规划,这样一来,无论是在正常作业状态还是非正常作业状态,系统都能够提供最佳的执行规划策略,确保作业的连续性和稳定性,这种动态响应机制能够减少农机在作业过程中对农田和作物的破坏,同时也降低了农机发生事故的概率。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327844.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表