一种基于机器学习的城市更新区识别方法
- 国知局
- 2024-11-18 18:15:29
本发明涉及一种基于机器学习的城市更新区智能识别技术。
背景技术:
1、城市形态演化是地区社会、经济和文化变化的一个重要表征,同时城市形态变化也反作用于地区的自然和社会空间。存量规划时代下,从城市到乡村的城市化梯度变化可能更加多元,城乡空间更新提质成为现阶段空间规划发展的目标。近年来,遥感技术和机器学习算法的结合为识别和分析城市形态演化提供了新的方法和工具,特别是在高精度和大尺度的城市建筑数据获取方面。
2、城市形态识别的常用算法是针对建筑的形态属性和地区的人口经济属性等特征展开聚类分析,常用机器学习算法包括k-means和gmm聚类算法等,但是已有算法往往注重单一时间截面下城市形态在不同空间的差异化分布情况,而无法将时间维度纳入到机器学习算法中,从而导致聚焦于单一年份的城市形态截面数据,难以纵向追踪比较城市形态演化过程。
技术实现思路
1、本发明针对现有技术的不足,提出一种采用机器学习算法识别城市更新区的技术方法。该方法强调基于多时间节点数据和机器学习算法,对大尺度地区城市更新区进行智能识别,有利于精细化城市管理。
2、本发明技术方案如下:
3、一种基于机器学习的城市更新区识别方法,包括以下步骤:
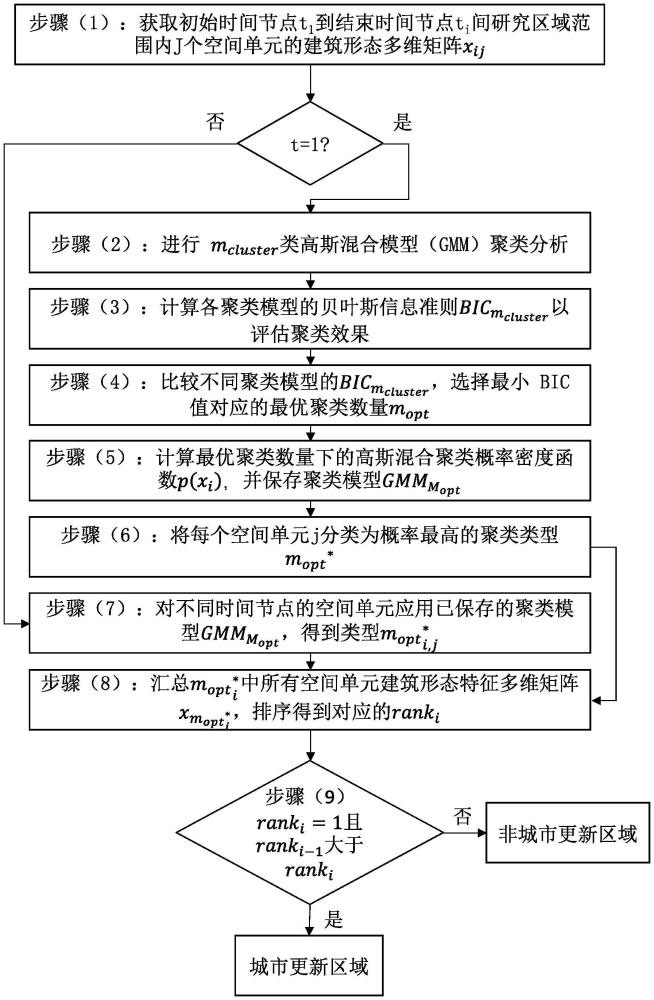
4、步骤(1):运用初始时间节点t1到结束时间节点ti间研究区域范围内建筑轮廓数据,总计j个空间单元,计算包括以每个空间单元j的中心为中心点,k米为半径的圆内相交的建筑面积总和建筑周长平均值建筑朝向角度熵值建筑形状指数平均值建筑紧凑度指数平均值和建筑数量6个建筑形态特征构成多维矩阵xij,具体公式如下:
5、
6、公式1中为第i年空间单元j的建筑面积总和,为圆内第i年第jbuilding栋建筑的面积。
7、
8、公式2中为第i年空间单元j的建筑周长平均值,pi为圆内第i年第jbuilding栋建筑的周长。
9、
10、公式3中为第i年空间单元j的建筑朝向角度熵值,pik为第i年建筑朝向角度k的概率分布。
11、
12、公式4中为第i年空间单元j的建筑形状指数平均值,为包含第i年建筑jbuilding轮廓多边形的最小外接圆面积。
13、
14、公式5中为第i年空间单元j的建筑紧凑度指数平均值,为第i年建筑jbuilding轮廓多边形的最小外接圆内建筑jbuilding的周长。
15、
16、公式6中xij为每个空间单元j的包含6个建筑形态特征多维矩阵。
17、步骤(2):对步骤(1)得到的第1年(i=1)所有空间单元的建筑形态特征多维矩阵xi进行高斯混合模型(gmm)聚类分析,聚类数量mcluster取值为1,2,……,m,获得不同聚类数量取值对应的混合系数均值向量和协方差矩阵∑mcluster,公式如下:
18、
19、公式7中为空间单元j属于mcluster类的后验概率,是以为均值,∑mcluster为协方差矩阵的多变量正态分布。
20、
21、公式8中是第mcluster个聚类的混合系数,满足且为指示变量,如果空间单元j属于mcluster类则为1,否则为0。
22、
23、公式9中为均值向量。
24、
25、公式10中∑mcluster为每个聚类的协方差矩阵,为向量和其转置的乘积得到的协方巧矩阵。
26、步骤(3):根据步骤(2)计算得到的混合系数均值向量和协方差矩阵∑mcluster,计算对应的贝叶斯信息准则公式如下:
27、
28、公式11中为聚类数为mcluster时对应的最大似然值。
29、
30、公式12中,为聚类数为mcluster时对应的贝叶斯信息准则(bic)。
31、步骤(4):根据步骤(3)计算得到的聚类数量mcluster对应的通过比较得到最小bic值对应的聚类数量作为最优聚类数量mopt,公式如下:
32、
33、公式13中,mopt为最优聚类数量,为获取最小值算法。
34、步骤(5):根据步骤(4)得到的最优聚类数量mopt,分别计算mopt=1,2,3,......,mopt对应的高斯混合模型的聚类概率密度函数,并保存混合系数均值向量和协方差矩阵∑mopt,作为最终聚类训练模型的核心参数,公式如下:
35、
36、公式14中p(xi)为聚类数为mopt时高斯混合模型的概率密度函数。
37、步骤(6):根据步骤(5)计算的聚类概率p(xi),将每个空间单元j分类为概率最高的类型mopt*。公式如下:
38、
39、公式15中p(mopt|xi)为mopt=1,2,3,......,mopt对应的概率密度。
40、公式16中是以为均值,∑mopt,mopt为协方差矩阵的多变量正态分布。
41、步骤(7):对时间节点t2到结束时间节点ti间所有年份空间单元,运用重复步骤(5)和步骤(6),得到不同时间节点下每个空间单元ji的聚类结果
42、步骤(8):根据步骤(7)得到的每个空间单元j的聚类结果分别汇总统计不同mopt类型中所有空间单元的6个建筑形态特征多维矩阵xi得到运用组间比较法对进行排序得到对应的ranki,用以表征城市化程度,排名从1到数字越小表示城市化程度越高。公式如下:
43、
44、公式17中,对每个聚类的建筑形态特征矩阵进行的统计分析,包括计算均值、中位数、方差等统计量。sort()函数表示基于统计量的排序方法,用于确定每种聚类类型的特征矩阵的顺序或等级,排序方法根据研究区域所在地特征评判,一般认为建筑密度越高、建筑数量越多、紧凑度越高等的类型城市化程度越高。
45、步骤(9):根据步骤(8)得到的每个空间单元j在不同时间节点的ranki,如果ranki=1且ranki-1大于ranki则将该空间单元i识别为城市更新地区。
46、本发明考虑多时间节点的城镇化梯度变化,可以更全面地理解城市发展的动态过程,捕捉城市扩展和密度变化的趋势,从而识别城市更新地区,为城市规划提供更科学的依据。具体的有益效果是:
47、(1)基于多时间节点数据,实现对大尺度空间范围的城市形态演化过程的识别;
48、(2)基于机器学习算法,改变以往基于完全基于人工的城市更新区识别方法,节省人力;
49、(3)具有较强可复用性,通过本发明方法训练出的城市更新区识别模型可以存储关键模型参数,并应用于其他地区的城市更新区识别工作中。
技术特征:1.一种基于机器学习的城市更新区智能识别方法,其特征在于,包括以下步骤:
技术总结本发明提出了一种利用机器学习进行城市更新区智能识别的方法。该方法使用多个时间节点的建筑轮廓数据,并运用聚类分析算法来智能化地识别需要更新的城市区域。通过对比不同时间节点的数据,本方法能有效追踪城市空间形态的演变,并据此识别城市更新区。这一方法不仅具备高度的可重复性和操作效率,还能通过保留初始时间节点的机器学习模型参数,使得经过训练的模型可适用于跨年度数据,从而实现持续且高效的城市更新区识别。本发明为存量规划下的城市更新区划定提供了强有力的技术支持。技术研发人员:肖扬,苗丝雨受保护的技术使用者:同济大学技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/327830.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。