一种共轴对转多支承转子系统的刚度优化方法
- 国知局
- 2024-11-18 18:15:15
本发明涉及一种实现共轴对转多支承转子系统的刚度优化的方法,具体属于双转子结构优化算法领域。
背景技术:
1、同轴对转双转子结构与同向旋转的多级风扇结构相比,由于其风扇相对旋转,第二级风扇的压比能够达到较高的水平,约1.4~1.6。且在尺寸、压比相同的情况下,对转结构的风扇转速远低于一般的同向多级风扇。因此,采用同轴对转双转子结构对于解决风扇直径过大的问题很有效果。同时,对转的双转子能够令叶片叶尖产生的垂直于叶片直径的涡流相互抵消,大大降级了能量损耗。除此之外,该结构还能使因两个螺旋桨旋转而产生的扭矩相互抵消,增加平稳性的同时还能够提升效率。上述优点使得同轴对转的航空发动机受到多国青睐。。
2、虽然同轴对转双转子结构具备诸多优势,但因其结构更为复杂,运转时存在较大振动和噪声问题。其中,不平衡振动是对转双转子结构噪声的一个重要来源。除了会产生巨大的噪声外,不平衡振动还可能会造成发动机性能降低、寿命下降,严重时甚至会导致叶片碰摩、损坏甚至脱落、轴承损坏等故障。虚拟动平衡法基于有限元法,在有限元模型上添加虚拟激励,分析转子特性,代替实际的试重过程,模型准确的话,可实现无试重动平衡。该方法结合了转子动力学理论和有限元,将在实际中对转子的操作转换到模型上来,通过在模型上施加虚拟量进行研究计算,替代了实际平衡中的加重过程,极大地节约了启车成本,提高了动平衡的效率。但是,虚拟动平衡常存在模型精度不高,参数准确度不足的问题,严重影响了虚拟动平衡的平衡效果。同时,对于双转子结构,高速、轻载的航空发动机转子系统在高压转子和低压转子之间采用内、外圈同向旋转的圆柱滚子轴承作为中介轴承。通常是内圈联接在低压转子上,外圈联接在高压转子上,内圈转速小于外圈转速,形成动力学特性较为复杂的双转子-滚动轴承耦合系统。因此,提高同轴对转双转子虚拟模型的精度十分重要。
3、2015年,专利号cn104535262a公开了一种透平机械n+1支撑轴系整机无试重虚拟动平衡法,属于透平机械动力学与动平衡技术领域。该发明针对n+1支撑轴系转子振动特性耦合强、转子间振动相互关联更大、轴系振动强开复杂的问题,提出了一种能减少机组启停机次数、缩短动平衡时间、提高动平衡效率、减少动平衡费用的虚拟动平衡方法。与该专利相比,不同之处在于:本专利可应用于对转双转子的动平衡,且考虑到了轴承刚度随时间和转速的变化,提高了有限元模型的精度,从而提高了双转子模型的精度。
4、2020年,专利号cn111639386a公开了一种航空发动机用无键相虚拟动平衡方法,属于振动主动控制和人工智能技术领域。该发明针对某些无法测量转速信号而又急需动平衡的旋转机械,可建立与之相似的有限元模型上,施加虚拟不平衡量后对其进行稳态分析。根据实测的转子振动幅值,利用编写的有限元转子动力学程序,采用非线性粒子群优化算法对不平衡量的位置进行寻优。该方法无需相位信息,可在任一转速下通过一次原始振动测量,便能精确得到配重大小。再通过一次任意相位或重量的试重,即可计算出配重两个可能的位置。与该专利相比,本专利不同之处在于:本专利通过自编写有限元程序,实现了可以快速调用的动力学分析方法。在保证精度的情况下,提高了双转子模型优化的效率。
5、2022年,专利号cn115640717a公开了一种带中介轴承双转子系统的可容模态优化设计方法,属于航空发动机领域。该发明为为克服现有技术中存在的“临界转速裕度”准则适用性越来越小、可容模态优化设计方法不完善、未针对双转子系统的可容模态优化设计方法的问题,不考虑临界转速及其裕度范围,对全转速范围内带中介轴承双转子系统高压激励和低压激励的所有模态进行优化,利用该发明所构建的模态可容度评价函数对所有模态进行评估,利用遗传算法追求本发明构建的优化目标函数的最大值,并且在各阶模态可容度评价函数均大于0.8之后才能输出最终的优化结果,这使得各阶模态在经过带中介轴承双转子系统的可容模态优化设计之后,均能满足容忍共振的要求,能够在临界转速处运行,从而使双转子系统能够在任意转速下运行,无需遵循“临界转速裕度”准则,提高了航空发动机的高机动性,为下一代航空发动机的设计提供了参考和思路。与该专利相比,不同之处在于:本专利通过粒子群算法,依据实测双转子临界转速和振动响应,对对转双转子系统在不同转速组合下进行刚度优化,实现了不同转速下中介轴承刚度可变,提高了有限元模型在不同转速组合下的模型精度。
6、2023年,专利号cn116539224a公开了一种双转子系统动平衡的方法,系统性地建立了航空发动机双转子系统n1+n2平面的模态动平衡方法,在高压为主激励时的模态下与低压转子为主激励时的模态下进行正交校正质量组计算,平衡的定转速比条件在发动机双转子系统在实际运行时采用双参数输入法控制。在进行动平衡时,将高压激励的模态与低压激励的模态分开平衡;在航空发动机双转子系统模态动平衡时,将影响系数法与模态动平衡法相结合,对双转子系统各个平衡面的试重组与配重组进行计算,综合了模态动平衡不影响其他阶次的模态振动以及影响系数法算法简单等优点,使动平衡效果更明显。该发明对双转子航空发动机的振动超标具有控制与抑制作用,为航空发动机安全运行提供了可靠和有效的保证。与该专利相比,不同之处在于:本专利结合有限元法和优化算法,在虚拟动平衡的基础上增加了对模型参数的优化修正,考虑到内外转子经由中介轴承传递的振动耦合,提高了对于对转双转子系统的模型优化效果。
7、2023年,专利号cn117540172a公开了一种基于时序自监督域自适应网络的转子故障诊断方法。通过多工况转子原始加速度数据构建自监督辅助数据,同时实现原始数据集及自监督辅助数据集划分;通过构建辅助学习任务与自监督辅助数据进行模型训练和模型参数优化,在时序自监督学习过程中,采用无监督域自适应的方法,配合时序自监督学习实现时序自监督域自适应学习;在下游故障识别任务中构建故障识别器并利用多域原始训练数据进行模型参数微调,然后获取最终模型并实现目标工况转子故障诊断。与该专利相比,不同之处在于:本专利应用于对转双转子,考虑到了双转子因中介轴承存在而导致的内外转子振动的传递复杂,针对不同转速下中介轴承的刚度变化进行针对性的变刚度优化。
8、2024年,专利号cn117647936a公开了一种线性变参数系统的航空发动机的多目标最优控制方法。该发明根据航空发动机的运行过程和结果设定目标函数以及约束条件,建立多目标最优控制模型;通过控制参数化方法,将无限维的最优控制问题等价转化为有限维的最优参数选择问题;利用改进的多目标进化算法对转化后的多目标优化问题进行求解,得到pareto解集。能够在种群进化过程中避免陷入局部最优解,从而获得较为理想的数值结果,为最终决策提供参考依据;基于数值实验所得到的解集可视为航空发动机的油量输入律。良好的油量输入能够有效提升航空发动机的燃烧效率,进而降低燃料损耗并增加推力输出,从而提高航空发动机的性能和效率。与该专利相比,不同之处在于:本专利可应用于共轴对转的双转子结构,利用粒子群算法针对多个优化目标同步进行优化,得到更加精确的有限元模型。
技术实现思路
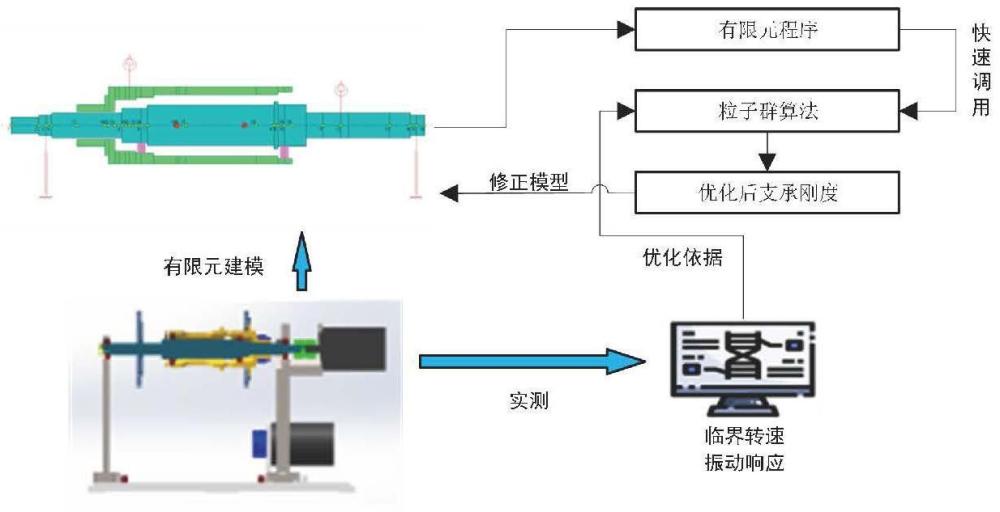
1、本发明目的在于克服对转双转子系统存在内外转子振动耦合、中介轴承刚度随转速和时间变化且有各向异性、历史动平衡数据利用不足等问题。利用自编写的可调用的有限元分析软件建立对转双转子系统对应的有限元模型。通过粒子群优化算法,依据实测一阶临界转速与部分节点实测振动数据对对转双转子有限元模型进行动力学参数多重优化,实现在不同转速下中介轴承刚度可变。通过对历史不平衡数据进行数据反演,获取对转双转子系统的动刚度特性,将其与有限元模型优化后的结果进行对比,实现对历史动平衡数据的充分利用,提高虚拟模型的精确度。
2、为实现上述目的,本发明采用的技术方案如下:
3、一种共轴对转多支承转子系统的刚度优化算法,包括以下步骤:
4、步骤1、建立对转双转子有限元模型。利用有限元法将实际对转双转子进行离散化,成为有限自由度的离散化模型。通过编写的有限元程序对对转双转子进行动力学仿真,分别对内外转子进行单转子的稳态不平衡响应分析。
5、步骤2、对离散后的对转双转子模型进行模态分析。对对转双转子有限元模型进行模态分析,得到对应转速比的坎贝尔图,从而获得模型的前几阶临界转速和对应振型。
6、步骤3、完成模态分析后,测量实际对转双转子的临界转速。在实际对转双转子上测量指定转速比的随转速变化的伯德图,提取临界转速。临界转速即为伯德图中振幅出现峰值同时相位发生急剧变化所对应的转速。
7、步骤4、分别测量对转双转子内轴和外轴在给定试重下的振动响应。在同一转速下测量内外转子各三个测点的响应或者测量内外转子各一个测点在三个不同转速下的响应。
8、步骤5、完成对实际对转双转子的各项所需数据的测量后,以仿真模型为基础,将实测临界转速和振动响应代入粒子群算法寻优,进行多重优化。以下步骤5.1~步骤5.7为多重优化的具体操作。
9、步骤5.1、定义粒子群适应度函数其中,function是适应度,x1~xn是多个优化参数。对于本方法,x1~xn分别取为:临界转速计算结果与测量结果的差与测量结果的比的绝对值、各个测点在选定转速的响应的计算结果与测量结果的差与测量结果的比的绝对值。
10、步骤5.2、开始进行粒子群寻优,先初始化参数,设置迭代次数、学习因子和种群规模等参数,设置个体速度和搜素范围的最大最小值。搜索范围与粒子个体值代表的参数有关,对于本专利,粒子个体值代表轴承刚度,因此搜索范围一般取为轴承刚度经验值±102数量级,单位为n/m。
11、步骤5.3、初始化种群,计算适应度值。随机在搜索空间内产生一个包含着种群规模数量个体的种群,每个个体的速度和位置都是六维向量,随机赋值。调用适应度函数,计算得到每一个个体的适应度值。对于本专利,粒子个体的六维向量分别代表支承轴承与两个中介轴承在x轴和y轴方向的刚度值。
12、步骤5.4、计算个体和群体极值。将各个体的适应度值相比较,得到群体极值,并记录个体的最佳位置作为个体极值。
13、步骤5.5、更新粒子的速度和位置。每一粒子都根据个体极值和群体极值生产成下一代粒子的速度和位置。
14、步骤5.6、重复步骤5.4和步骤5.5,直到适应度值达到所需精度。此时粒子达到最优位置,即获取了最接近实际对转双转子的轴承刚度。
15、步骤5.7、用寻优得到的值更新对转双转子模型,此时的对转双转子模型与实际对转双转子模型的临界转速、振动响应都较为接近,从而提高了模型精度。
16、与现有方法相比,本发明具有以下有益效果:
17、1、可应用于对转双转子结构,考虑到了双转子对转产生的反向陀螺力矩和经由中介轴承传递的内外转子振动耦合。
18、2、多参数同时参与,对对转双转子结构进行多重优化,同时考虑到对转双转子结构的临界转速和振动响应特性,使刚度优化结果更加精确,达到令仿真模型在多个角度都更加贴近实际对转双转子的效果。
19、3、与根据经验公式计算或通过查表得到的固定轴承刚度相比,本方法通过在不同的转速组合下对轴承刚度进行分别优化,可以得到轴承刚度随转速变化的规律曲线,从而实现在不同转速下轴承刚度可变,与真实对转双转子结构更为贴合。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327821.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表