海底集矿车浮力调控协同底质改良的脱困方法与流程
- 国知局
- 2024-11-18 18:21:13
本发明涉及一种深海采矿,具体涉及一种海底矿车浮力调控协同底质改良的脱困方法。
背景技术:
1、随着我国产业升级以及资源结构性调整以及高科技和新能源行业的快速发展,对锰、钴、镍等金属的需求量大大增加。然而,传统陆域矿产资源开发时间悠久,日益枯竭,然而深海底部蕴含着大量的矿产资源,这为解决矿产资源的枯竭提供了一个有效的方法。深海集矿车作为海底采矿的重要一部分,作为海底采矿工作的主体,其正常的行驶运行是保证深海采矿活动正常运行的前提,然而,由于深海底质具有高含水率、低强度的特性,使集矿车在深海底质上行走时易发生沉陷、打滑等不良工况。注浆作为一种陆上常用的土体加固方式,将其运用到集矿车脱困成为一种良好的手段,现有关于海底采矿底质改良脱困装置的研究有以下缺陷:
2、1.现有海底底质改良脱困装置大多通过两种手段加固土体,一种是通过高压泵送,由于海底底质稀软,可能导致浆液冲烂底质,造成更严重的沉陷或导致车体倾斜;第二种是直接将浆液输送到履齿与底质剪切处附近,加固时履带仍然陷入在稀软底质中,履齿剪切处加固效率低,最终会成功率低以及脱困失败造成的二次沉陷。
3、2.由于海底不同矿区的底质力学特性具有差异,需要根据不同的底质类型或地形条件进行调整,现有底质改良脱困装置无法在不同地形、不同底质下实现不同类型浆液脱困。
4、3.现有深海集矿车脱困装置在脱困过程中车身可能由于地形、不均匀沉陷或是脱困时受力不平衡而导致车身过度倾斜或发生倾覆,现有脱困装置无法实现在脱困过程中保持车身平衡。
5、4.现有注浆海底集矿车脱困装置没有考虑到通过车身的重心修正以及车体减重来进行车体沉陷、翘起等不良工况的预防。
技术实现思路
1、本发明的目的在于提供一种海底集矿车浮力调控协同底质改良的脱困方法,以解决上述背景技术中的问题。
2、为实现上述目的,本发明采用的技术方案是提供一种海底集矿车浮力调控协同底质改良的脱困方法,所述方法包括:
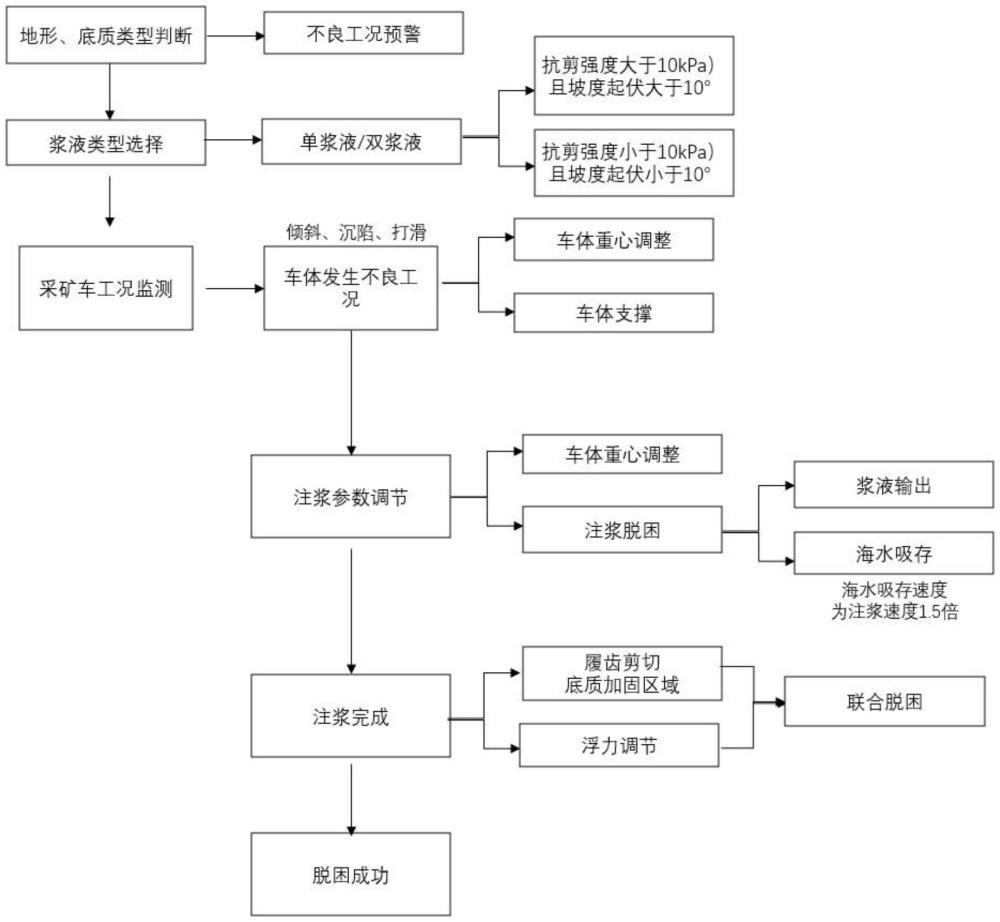
3、s10:在进行采矿工作前,对采矿区域的地形和底质进行详细分析,根据地形和底质的不同,评估不同地形以及底质易发生的不良工况,进行预警;
4、s20:预测不良工况并对应选择相应的浆液;
5、s30:当集矿车在采矿的行进过程中陷入海底稀软底质时,车身产生不均匀沉降或者发生原地打滑,车身姿态传感系统监测到车体参数异常,准备进行脱困;
6、s40:当车身处于不良工况时,进行车身浮力调整,若调整后仍然无法解决,则进行步骤s50;
7、s50:车身支撑系统启动,伸缩支撑柱从车体下方向下伸出将车身顶起,在支撑过程中,通过智能注浆控制系统控制调节转向头的转动方向,实时控制各个浆液储存罐体海水储存区中的海水分布,并实时监测车身姿态传感系统数据,确保车身在顶起过程中保持稳定,避免过度倾斜或翻滚;
8、s60:在支撑过程中实时调节重心分布,通过控制不同海水储存区的吸水量和排水量,实现集矿车重心的调整以及车体重量的减重;
9、s70:当采矿工作区域位于稀软底质区域时,所述浆液储存罐体海水储存区采用极高浮力、高浮力以及正常浮力三个浮力等级进行调节车体平衡;当采矿工作区域位于硬质底质区域时,所述浆液储存罐体海水储存区可采用所有浮力等级进行调节车体平衡;
10、s80:在车身顶起完成后,扩展注浆管沿着伸缩支撑柱进行展开,确保其达到预定的位置和角度,并伸出伸缩注浆头;
11、s81:针对沉陷与打滑工况,将扩展注浆管伸展至履带下方部位;
12、s82:针对倾斜工况,将扩展注浆管伸展至地形不均匀处;
13、s90:启动智能注浆控制系统,按照预定的注浆参数开始注浆,监测智能注浆控制系统的数据,确保注浆过程稳定,并根据需要调整注浆参数,观察注浆效果,确保注浆材料能够均匀分布于履带下方并填充到所需区域;
14、s91:对于抗剪强度小于10kpa的软质底质,注浆速度为0-1.5l/min,避免破坏底质;
15、s92:对于抗剪强度小于10kpa的硬质底质,注浆速度为1.5-2l/min,提高脱困效率;
16、s100:通过控制不同海水储存区的吸水和排水量,可以实现集矿车重心的调整,在注浆过程中,通过智能注浆控制系统控制调节转向头的转动方向以及各个浆液储存罐体海水储存区中的海水分布,并实时监测车身姿态传感系统数据,防止因注浆产生的车身重量分布不均而导致的车体不均匀沉陷;
17、s110:当进行注浆时,再次进行车体重心调节,当某个浆液储存罐体的浆液储存区进行注浆工作时,该浆液储存罐体的海水储存区进行吸存海水,海水吸存速度为注浆速度的1.5倍,当车体左或右侧沉陷时,可以减少左或右侧海水储存区的水量或增加右或左侧两个海水储存区的水量;当需要使集矿车前或后部下沉时,可以减少前或后侧海水储存区的水量或增加后或前部两个海水储存区的水量;
18、s120:当注浆达到预定量或预定时间后,停止注浆操作,并等待注浆材料固化,监测注浆区域的固化情况,确保注浆材料能够形成坚固的支撑基础;
19、s130:注浆材料固化后,伸缩支撑柱缩回,车体下降,缩回过程中,依据车身姿态传感器的监测参数,不断调节转向头的转动方向以及各个浆液储存罐体海水储存区中的海水分布;
20、s140:检查集矿车是否能够成功脱困,车身姿态传感器和距离传感器评估集矿车的当前状态,确保其姿态稳定且与周围环境保持安全距离,当进行车体脱困时,履齿剪切底质加固区域,此时,由于加固区域土体抗剪强度大大提高,集矿车牵引力增强,同时,在脱困过程中,通过控制不同海水储存区的吸水和排水量再次进行车体重量调节,防止在脱困过程中发生不均匀沉陷,若不能脱困,重复步骤s40-s140,直至脱困;
21、s150:待脱困成功后,伸缩支撑柱缩回,恢复原位,集矿车继续正常进行采矿工作。
22、进一步地,在s20步骤中,具体过程如下:
23、s21:针对底质类型进行浆液选择,对于抗剪强度小于10kpa软质底质或坡度起伏小于10°需要快速固化的区域,选择双液浆。
24、s22:对于抗剪强度大于10kpa硬质底质且坡度起伏大于10°的需要长期稳定的区域,选择单液浆。
25、s23:对于混合底质类型,可以混合使用单液浆和双液浆,以达到最佳效果。
26、进一步地,在s30步骤中,具体过程如下:
27、s31:当车身姿态传感系统监测到车身与水平面角度大于20°视为倾斜;
28、s32:当车身姿态传感系统监测到车身陷入土体深度大于两倍履齿高度时视为沉陷;
29、s33:当车身姿态传感系统监测到车体实际速率与车体设定速率之比小于0.9时视为打滑。
30、进一步地,在s40步骤中,具体过程如下:
31、s41:针对车身处于倾斜工况时,调整车身海水储存区海水分布,当车身一侧高于另一侧时,增加高侧浆液储存罐体中海水储存区的海水量,并减少低侧浆液储存罐体中海水储存区的海水量;
32、s42:针对沉陷工况时,排空浆液储存罐体海水储存区中的海水,增加车体浮力,实现车身减重,减少沉陷深度;
33、s43:针对打滑工况时,逐渐增加浆液储存罐体海水储存区中的海水,降低车体浮力,适量增加车体对底质的压力,实现增强车体牵引力。
34、进一步地,所述集矿车底质改良脱困装置包括车身姿态传感系统、车身支撑系统、扩展注浆系统以及四个浆液储存罐体;所述车身姿态传感系包括摄像头以及多传感器联合系统,所述多传感器联合系统包括速度传感器、距离传感器、平衡传感器,负责实时监测集矿车的姿态包括倾斜角度、距离以及速度,以便对车身姿态进行精确控制,能够清晰地看到注浆区域的情况;
35、所述车身支撑系统包括支撑板、伸缩支撑柱和转向头,车身顶起系统位于车身下方,通过转向头将伸缩支撑柱与车体相连,所述伸缩支撑柱能够将沿竖直方向位移,并将车身顶起,使扩展注浆系统能够顺利展开,所述伸缩支撑柱包括液压缸、电动推杆或其他类型的驱动器,根据实际需要选择合适的驱动方式;所述支撑板位于伸缩支撑柱上方,所述扩展注浆系统包括智能注浆控制系统、扩展注浆管、伸缩注浆头以及限位器,所述智能注浆控制系统控制扩展注浆管的展开、注浆泵的注浆速度、注浆压力参数,并能够控制不同浆液储存罐体进行注浆;所述扩展注浆管环绕于伸缩支撑柱,能够沿着伸缩支撑柱侧面进行展开,伸缩注浆头能够沿着扩展注浆管方向进行伸缩,并将注浆材输送到需要加固的区域,限位器用于限制扩展注浆管的行程范围,以防止它们超出安全范围或损坏设备;所述各个浆液储存罐体通过连接软管相连;
36、所述四个浆液储存罐体位于车体四个角,所述罐体分为上下两层,罐体上层为浆液储存区,罐体下方为海水储存区,罐体下方海水储存区能够通过出水阀门进行排空,通过进水阀门吸存海水,进而调整车身配重以及改变集矿车的整体浮力,从而帮助它在注浆过程中保持稳定,所述海水储存区体积大于车体体积的0.15倍;所述罐体浮力等级可分为五个等级:极高浮力,所有海水储存区均排空至最低水位;高浮力,一个或两个海水储存区排空至最低水位,其余海水储存区保持一定水位;正常浮力,所有海水储存区保持中等水位;低浮力,一个或两个海水储存区吸满水,其余海水储存区保持中等水位;极低浮力,所有海水储存区均吸满水;
37、当集矿车陷入稀软底质时,集矿车可根据车身姿态系统装置判断车身沉陷,并依据沉陷状态通过浆液储存罐的海水储存区进行排出海水来进行车身减重;当集矿车由于行走在陡峭或是不均匀坡度的地形上时,集矿车可根据车身姿态系统装置判断车身平衡状态,并依据车身平衡状态通过浆液储存罐的海水储存区进行排出或储存海水来实现稳定车身的平衡。
38、进一步地,根据采矿地区的地形、底质类型以及车体不良工况的严重程度,所述四个浆液储存罐体的浆液储存区可以装有至多四种浆液来实现进行不同类型浆液的注浆脱困。
39、进一步地,所述支撑板的面积需要大于两条履带的面积,且支撑板位于两侧履带内侧,所述伸缩支撑柱直径大于25cm。
40、进一步地,所述浆液类型分别为单液浆或双液浆,单液浆为聚丙烯酰胺、聚氧乙烯醚、聚丙烯酸盐树脂、水、催化剂、硫铝酸盐水泥、膨润土以及无机废料组成;双液浆a液为双酚a型环氧树脂或二甲苯,b液为二氨基二苯甲烷或聚醚二元醇,a液与b液比例为1:1。
41、进一步地,所述注浆泵注浆速度为0-2l/min,所述海水储存区吸存海水以及排出海水速度为0-5l/min。
42、本发明的有益效果在于:
43、1、高度智能化的监测与控制:车身姿态传感系统能够实时监测集矿车的姿态、倾斜角度、距离以及速度等关键参数,为操作人员提供精确的数据支持,确保注浆脱困操作的高效性和安全性。智能注浆控制系统可以根据预定的注浆参数自动调整注浆过程,提高注浆效果。
44、2、灵活的支撑与调节能力:车身支撑系统通过伸缩支撑柱和转向头的组合,可以灵活调整车身姿态,确保在注浆过程中集矿车保持稳定,避免过度倾斜或翻滚。伸缩支撑柱可以根据需要沿竖直方向位移,顶起车身,为扩展注浆系统的顺利展开提供条件,并能够使履齿重新插入加固后的底质进行剪切。
45、3、多样化的注浆能力:四个浆液储存罐体可以储存不同类型的浆液,以适应不同地形、底质类型和车体不良工况的注浆需求。扩展注浆系统具有多根注浆管,可根据需要展开到预定位置和角度,确保注浆材料能够均匀分布并填充到所需区域,且海水储存区能够进行车身减重与重心调整,能够起到预防沉陷等不良工况的效果。
46、4、智能配重与浮力调节:浆液储存罐体分为上下两层,下层为海水储存区,可以排空或吸存海水,从而调整车身配重和整体浮力,帮助集矿车在注浆过程中保持稳定,并且能够配合浮力进行脱困,以及进行不良工况的预防。
本文地址:https://www.jishuxx.com/zhuanli/20241118/328343.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。