一种用于作业机具的电动悬挂装置及非线性控制方法
- 国知局
- 2024-11-18 18:26:37
本发明涉及农业机械,具体涉及一种用于作业机具的电动悬挂装置及非线性控制方法。
背景技术:
1、悬挂装置是拖拉机与作业机具连接的部件,其结构直接影响拖拉机的作业效率。传统农机使用的悬挂装置是采用液压机构驱动的,上述驱动方式需要发动机提供动力传动到液压机构才能运作,且控制精度不高,无法对作业机具的高度实现精确调节,能源效率也不高。
技术实现思路
1、本发明的目的在于克服上述存在的问题,提供一种用于作业机具的电动悬挂装置,该电动悬挂装置采用电动驱动方式,可以对作业机具的高度实现精确调节,控制精度更高,能源效率更高。
2、本发明的另一目的在于提供一种非线性控制方法。
3、本发明的目的通过以下技术方案实现:
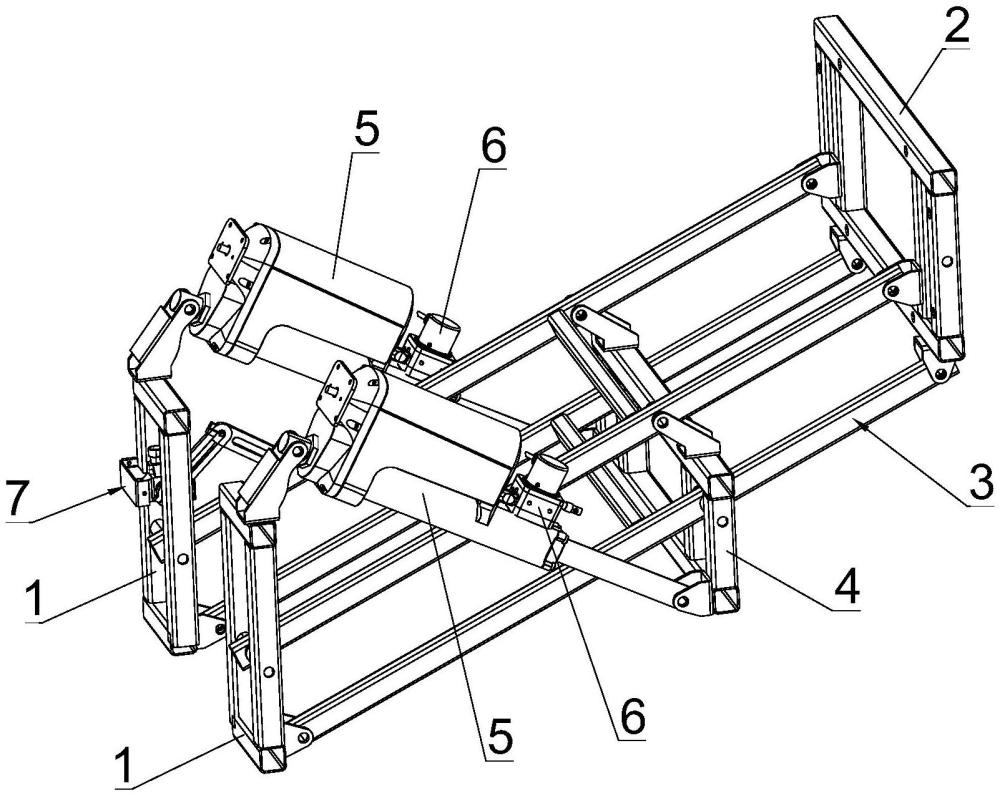
4、一种用于作业机具的电动悬挂装置,包括基座、悬挂架、控制单元、设置在所述基座与悬挂架之间的平行连杆机构、设置在平行连杆机构上的连接件、设置在所述基座与所述连接件之间的两个电动推杆、用于测量每个所述电动推杆的伸缩长度的直线传感器以及用于测量平行连杆机构摆动角度的角度检测机构;其中,所述平行连杆机构的一端与所述基座铰接,所述平行连杆机构的另一端与所述悬挂架铰接;所述电动推杆的一端与所述基座连接,所述电动推杆的另一端与所述连接件连接;所述基座固定连接于新能源电动化拖拉机上,所述悬挂架连接于作业机具上;所述电动推杆、直线传感器以及角度检测机构均与所述控制单元电气连接。
5、上述电动悬挂装置的工作原理是:
6、工作时,两个电动推杆通过直线传感器实现精准的同步伸缩运动,从而带动平行连杆机构发生摆动,从而带动悬挂架的升降,而悬挂架连接有作业机具,进而实现作业机具的升降;角度检测机构可以精确检测到平行连杆机构的摆动角度,从而检测到当前作业机具的高度;控制单元可以根据直线传感器以及角度检测机构反馈的信息对电动推杆的伸缩进行控制,在作业时下放作业机具到特定角度,田间调头时抬升作业机具,避免作业机具与田垄碰撞,有利于水田作业智能化。
7、本发明的一个优选方案,其中,所述直线传感器为拉绳位移直线传感器,两个拉绳位移直线传感器与两个电动推杆一一对应设置;所述拉绳位移直线传感器固定在电动推杆上,所述拉绳位移直线传感器的绳头测量末端与电动推杆的伸缩末端相连接。通过设置两个拉绳位移直线传感器,可以分别对两个电动推杆进行检测,可以实时测量电动推杆的伸缩长度。
8、进一步地,所述拉绳位移直线传感器的测量范围为0~1000mm,防水级别为ip68防水防尘级别,所述拉绳位移直线传感器通过使用canopen通讯协议与控制单元进行通讯。对检测长度区间设置阈值,所述拉绳位移直线传感器用于判断两个电动推杆是否在设置的工作区间内同步动作,如果是,则电动推杆按照原先设定的任务动作;如果否,则电动推杆根据同步算法动作。
9、优选地,所述平行连杆机构包括两组平行连杆组件,每组平行连杆组件包括两根相互平行且上下分布设置的连杆,所述连杆的一端与所述基座铰接,所述连杆的另一端与所述悬挂架铰接;所述连接件设置在所述连杆上。上述结构中,平行连杆机构、基座以及悬挂架构成平行四连杆机构,连接件用于使电动推杆的承重能力达到最优,电动推杆与所述连接件相铰接,由此电动推杆的运动便可以带动连接件的运动,由于连接件位于基座与悬挂架之间的位置,因此,当连接件运动时,悬挂架也跟着运动,带动作业机具运动。
10、进一步地,连接件的位置选取是通过多次试验求取出来的,所述连接件可以最优化整个电动悬挂装置的负载力分布状况,使得电动推杆在可承受的额定范围内达到最大的带负载能力,最终试验确定连接件与基座的距离为300mm时,电动推杆的承重性能达到最优,并且结构的稳定性达到最佳状态,有效避免了大负载的情况下结构件变形或者电动推杆堵转等危险意外的发生。
11、优选地,所述角度检测机构包括设置在所述基座上的角度传感器以及设置在所述角度传感器与所述连杆之间的传动组件,所述角度传感器与所述控制单元连接;所述传动组件包括第一转动杆以及第二转动杆,所述第一转动杆的一端与所述角度传感器的轴心固定连接;所述第一转动杆的另一端与所述第二转动杆的一端连接,所述第二转动杆的另一端与所述连杆连接。通过设置上述机构,随着连杆的运动,会带动第二转动杆运动,进而带动第一转动杆转动,使得角度传感器的轴心发生转动,从而检测到平行连杆机构的运动,进而计算出当前平行连杆机构所处于的角度。
12、进一步地,所述角度传感器的输入电压为5v,输出电压霍尔量为0~5v,对应所述角度传感器的角度检测范围为360°。对检测角度设置阈值,所述角度传感器用于判断平行连杆机构是否在设置的工作区间内动作,如果是,则电动推杆不动作,如果否,则电动推杆根据移动信号进行动作。
13、一种非线性控制方法,所述非线性控制方法应用于所述电动悬挂装置,所述非线性控制方法包括以下步骤:
14、(1)电动悬挂装置首次开始作业前,需要对两个电动推杆以及两个直线传感器进行校准操作,控制单元将校准操作得到的校准值存储在内部存储空间中;
15、(2)电动悬挂装置开始正常作业:
16、(2.1)控制单元读取内部存储空间的校准值;控制单元根据校准值将电动推杆推动到校准时确定的参考位置,对直线传感器的输出数值进行核对;
17、(2.2)对电动推杆的实时位置进行检测,通过控制单元读取两个直线传感器的输出数值,检测两个电动推杆是否出现了位置偏差;
18、(2.3)如果两个电动推杆的出现了位置偏差,则根据位置误差的正负值,确定各个电动推杆的方向运行策略;
19、(2.4)根据方向运行策略,使用双电动推杆同步算法来决策两个电动推杆具体速度;
20、(2.5)检查使用双电动推杆同步算法进行调整后的两个电动推杆是否处于同步状态。
21、优选地,步骤(1)中,校准操作的具体过程为:需要确定一个参考位置,作为两个电动推杆最初的同步状态;所述参考位置为固定的位置值;将电动推杆推动到参考位置后,对两个直线传感器进行校准,此时两个直线传感器的输出数值为校准值,控制单元将校准值存储下来作为直线传感器的参考值。其目的在于,保证两个电动推杆在最初位置时,保持同步状态,作为直线传感器的参考值,以便保证后面直线传感器的输出数值的稳定和准确。
22、优选地,步骤(1)中,取电动推杆的伸缩长度最短的位置作为参考位置。其目的在于,便于快速校准,参考更加精确。
23、优选地,步骤(2.1)中,对直线传感器的输出数值进行核对的具体步骤为:核对直线传感器的输出数值是否正确;如果正确,则进入初始化成功状态,如果错误,则进入初始化失败状态。
24、优选地,步骤(2.3)中,根据位置误差的正负值,确定各个电动推杆的方向运行策略的具体步骤为:如果左边的电动推杆的位置领先与右边的电动推杆的位置,则减缓左边的电动推杆的伸缩速度,同时加快右边的电动推杆的伸缩速度;如果右边的电动推杆的位置领先与左边的电动推杆的位置,则减缓右边的电动推杆的伸缩速度,同时加快左边的电动推杆的伸缩速度。
25、优选地,步骤(2.5)中,检查使用双电动推杆同步算法进行调整后的两个电动推杆是否处于同步状态的具体步骤为:通过读取两个直线传感器的输出数值,如果两个输出数值表示两个电动推杆处于同步状态,则重复步骤(2.2);如果两个输出数值表示两个电动推杆处于不同步状态,则重复步骤(2.4);超过三次检查仍出现不同步状态,则判断电动悬挂装置故障,进入故障状态,通知工作人员注意两个电动推杆的状态并进行检修。
26、本发明与现有技术相比具有以下有益效果:
27、1、本发明中的电动悬挂装置,采用电动推杆进行驱动,动力来源是电力,可以直接使用电能驱动,降低能量损耗,对比传统拖拉机的液压机构,能源效率更高,电力驱动系统的能源转换效率可达到80%以上,而液压系统的效率相对较低,通常在60%左右。
28、2、本发明中的电动悬挂装置,结构简单,不需要液压机构中的杂的管路、阀门等液压元件;本发明中的电动悬挂装置控制性能优越,控制响应速度快,能实现更精准的速度和力矩控制。
29、3、本发明中的电动悬挂装置,采用两个电动推杆,提供了平行且相距较远的多个受力支点,有利于作业机具的平稳升降。
30、4、本发明中的电动悬挂装置,通过设置直线传感器,实现两个电动推杆精准的同步伸缩运动,保证两个电动推杆的同步运作,避免损伤电动悬挂装置;而且通过角度检测机构可以精确检测到平行连杆机构的摆动角度,从而检测到当前作业机具的高度,可以精确控制抬升或下降的高度,对作业机具的高度实现精确调节,控制精度更高;实现智能化机具作业,使作业机具贴合地面,提高作业效率。
31、5、本发明中的一种非线性控制方法,克服电动推杆的非线性特性问题,以便于实现电动悬挂装置的精确运动控制和多电动推杆结构的同步控制。
32、6、本发明中的一种非线性控制方法,非线性控制可以保证电动推杆的运动调节得快速、稳定和准确;同步控制可以避免结构拉扯和损坏等情况,保证多电动推杆结构的电动悬挂装置稳定工作;在拖拉机的电动化、智能化和节能方面做出了贡献。
本文地址:https://www.jishuxx.com/zhuanli/20241118/328755.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表