电子膨胀阀的运动控制方法、装置、设备及存储介质与流程
- 国知局
- 2024-11-18 18:27:09
本申请涉及车载电子阀,具体涉及一种电子膨胀阀的运动控制方法、装置、设备及存储介质。
背景技术:
1、车载电子膨胀阀的阀体,主要由步进电机的转子、定子线圈,和阀杆、阀针等部分组成。其控制原理是,通过控制定子线圈通电产生旋转磁场,促使转子旋转,带动阀杆和阀针沿垂直方向往复运动。
2、定子线圈的通电电流为id,id越大,转子产生的扭矩越大。旋转磁场的旋转频率为fr,fr越大,转子的转速越高。根据电子膨胀阀的机械机构设计和实际应用需求,会存在不同的id和fr组合。现有技术,id和fr在一开始就会固化下来,在膨胀阀的整个生命周期中都不再改变。但某些id和fr的组合,会导致转子在全程(或在某一段行程)进入共振频率,发生强烈振动。而转子的共振,会影响控制精度、机械结构强度和膨胀阀的使用寿命,还会产生高分贝的噪声。车载电子膨胀阀,大多安装于车辆前机舱内,跟驾驶舱仅隔了一层隔音棉。车辆nvh工程师,常常会关注到来自电子膨胀阀的运行噪声,并对其噪声表现提出了较高的要求。所以,减少转子的共振,降低运行噪声,是一个重要的课题。
3、但是,在相关技术中往往通过标定一个合适的fr来实现降低或者避免转子的共振可能,但是由于在电子膨胀阀工作一段时间后(如三至五年),机械传动结构发生磨损变化,导致转子发生共振的磁场旋转频率也会发生改变,因此,此时预先标定的fr将难以避免转子发生共振,有待进一步改进。
技术实现思路
1、本申请提供一种电子膨胀阀的运动控制方法、装置、设备及存储介质,可以解决上述现有技术中存在的相关技术问题。
2、第一方面,本申请实施例提供一种电子膨胀阀的运动控制方法,采用如下技术方案:
3、一种电子膨胀阀的运动控制方法,所述方法包括:
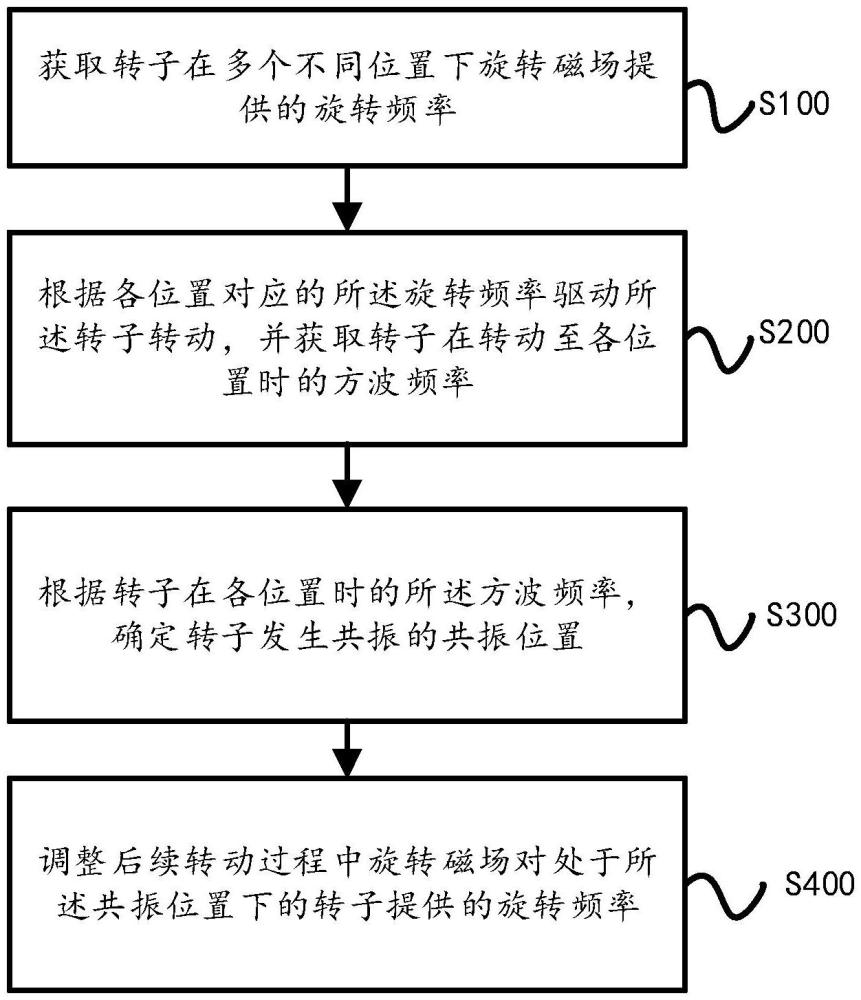
4、获取转子在多个不同位置下旋转磁场提供的旋转频率;
5、根据各位置对应的所述旋转频率驱动所述转子转动,并获取转子在转动至各位置时的方波频率;
6、根据转子在各位置时的所述方波频率,确定转子发生共振的共振位置;
7、调整后续转动过程中旋转磁场对处于所述共振位置下的转子提供的旋转频率。
8、结合第一方面,在一种实施方式中,所述调整后续转动过程中旋转磁场对处于所述共振位置下的转子提供的旋转频率中,
9、调整所述共振位置对应的旋转频率至预设的改善频率区间中未使用过的一旋转频率。
10、结合第一方面,在一种实施方式中,所述调整后续转动过程中旋转磁场对处于所述共振位置下的转子提供的旋转频率,包括以下步骤:
11、在达到所述改善频率区间的下限/上限之前,降低/提高所述共振位置对应的旋转频率;
12、在达到所述改善频率区间的下限/上限之后,提高/降低所述共振位置对应的旋转频率至所述改善频率区间的上限/下限。
13、结合第一方面,在一种实施方式中,所述降低/提高所述共振位置对应的旋转频率中,
14、根据预设的频率变化值,调整所述共振位置对应的旋转频率。
15、结合第一方面,在一种实施方式中,所述根据转子在各位置时的所述方波频率,确定转子发生共振的共振位置中,
16、所述共振位置为以超过预设的方波频率的第一限值的位置为起始位置的一段连续位置区间。
17、结合第一方面,在一种实施方式中,所述根据转子在各位置时的所述方波频率,确定转子发生共振的共振位置,包括以下步骤:
18、判断所述方波频率是否超过所述第一限值;
19、若超过所述方波频率上限,确定对应位置为所述共振位置的起始位置;
20、在所述起始位置之后,判断所述方波频率是否小于所述第二限值;其中,所述第二限值小于所述第一限值;
21、若小于所述第二限值,确定对应位置为所述共振位置的结束位置。
22、结合第一方面,在一种实施方式中,所述第一限值与所述第二限值均根据初始周期内转子运行时旋转磁场的初始频率和不同的状态系数得到。
23、第二方面,本申请实施例提供了一种电子膨胀阀的运动控制装置,采用如下技术方案:
24、一种电子膨胀阀的运动控制装置,所述电子膨胀阀的运动控制装置包括:
25、获取模块,其被配置为获取转子在多个不同位置下旋转磁场提供的旋转频率;
26、驱动控制模块,其被配置为根据各位置对应的所述旋转频率驱动所述转子转动,并获取转子在转动至各位置时的方波频率;根据转子在各位置时的所述方波频率,确定转子发生共振的共振位置;调整后续转动过程中旋转磁场对处于所述共振位置下的转子提供的旋转频率。
27、第三方面,本申请实施例提供了一种电子膨胀阀的运动控制设备,采用如下技术方案:
28、一种电子膨胀阀的运动控制设备,所述电子膨胀阀的运动控制设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的电子膨胀阀的运动控制程序,其中所述电子膨胀阀的运动控制程序被所述处理器执行时,实现如上所述的电子膨胀阀的运动控制方法的步骤。
29、第四方面,本申请实施例提供了一种存储介质,采用如下技术方案:
30、一种存储介质,所述存储介质上存储有电子膨胀阀的运动控制程序,其中所述电子膨胀阀的运动控制程序被处理器执行时,实现如上所述的电子膨胀阀的运动控制方法的步骤。
31、本申请实施例提供的技术方案带来的有益效果包括:
32、通过在转子转动运行过程中对各位置下产生的方波频率进行监控,并进一步根据监控的方波频率确定其转动过程中是否存在发生共振的共振位置,当确定转子的转动过程中存在共振位置后,通过对这些共振位置下旋转磁场提供的旋转频率进行调整,实现在转子下一次转动过程中能够在新的旋转频率下进行旋转,避免转子仍旧以之前的旋转频率进行转动而导致共振现象无法改善的问题。
技术特征:1.一种电子膨胀阀的运动控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的电子膨胀阀的运动控制方法,其特征在于,所述调整后续转动过程中旋转磁场对处于所述共振位置下的转子提供的旋转频率中,
3.如权利要求2所述的电子膨胀阀的运动控制方法,其特征在于,所述调整后续转动过程中旋转磁场对处于所述共振位置下的转子提供的旋转频率,包括以下步骤:
4.如权利要求3所述的电子膨胀阀的运动控制方法,其特征在于,所述降低/提高所述共振位置对应的旋转频率中,
5.如权利要求1所述的电子膨胀阀的运动控制方法,其特征在于,所述根据转子在各位置时的所述方波频率,确定转子发生共振的共振位置中,
6.如权利要求5所述的电子膨胀阀的运动控制方法,其特征在于,所述根据转子在各位置时的所述方波频率,确定转子发生共振的共振位置,包括以下步骤:
7.如权利要求6所述的电子膨胀阀的运动控制方法,其特征在于,所述第一限值与所述第二限值均根据初始周期内转子运行时旋转磁场的初始频率和不同的状态系数得到。
8.一种电子膨胀阀的运动控制装置,其特征在于,所述电子膨胀阀的运动控制装置包括:
9.一种电子膨胀阀的运动控制设备,其特征在于,所述电子膨胀阀的运动控制设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的电子膨胀阀的运动控制程序,其中所述电子膨胀阀的运动控制程序被所述处理器执行时,实现如权利要求1至7中任一项所述的电子膨胀阀的运动控制方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有电子膨胀阀的运动控制程序,其中所述电子膨胀阀的运动控制程序被处理器执行时,实现如权利要求1至7中任一项所述的电子膨胀阀的运动控制方法的步骤。
技术总结一种电子膨胀阀的运动控制方法、装置、设备及存储介质,所述方法包括:获取转子在多个不同位置下旋转磁场提供的旋转频率;根据各位置对应的所述旋转频率驱动所述转子转动,并获取转子在转动至各位置时的方波频率;根据转子在各位置时的所述方波频率,确定转子发生共振的共振位置;调整后续转动过程中旋转磁场对处于所述共振位置下的转子提供的旋转频率。通过在转子转动运行过程中对各位置下产生的方波频率进行监控,确定其转动过程中是否存在发生共振的共振位置,并通过对共振位置下旋转磁场提供的旋转频率进行调整,实现在下一次转动过程中转子能够在新的旋转频率下进行旋转,避免转子仍旧以之前的旋转频率进行转动而导致共振问题无法改善。技术研发人员:陈小鹏,陈新宇,项申奥,乔富鑫,瞿浩受保护的技术使用者:东风电子科技股份有限公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/328786.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表