一种针对蔬菜、果树全方位识别喷药装置及控制方法
- 国知局
- 2024-11-19 09:32:21
本发明涉及智慧农业机械,尤其涉及一种针对蔬菜、果树全方位识别喷药装置及控制方法。
背景技术:
1、在现代农业生产中,为了保护农作物免受病虫害的侵害,农药喷洒成为了必要的农业生产活动。农业喷洒不仅防止病虫害的侵害,还能促进植物生长,可提高农作物的产量和质量。但是过度喷洒农药会造成土壤污染、农药化学残留等问题,进一步损害人体健康和物种多样性的问题。因此,农民选择合适的喷药装置很重要。随着农业现代化的发展,为了提高工作效率、降低劳动成本,国内外相关领域人员开始研制相关机械设备,包括机动喷雾器、自动喷药装置和无人机喷洒。但传统的蔬菜喷药装置、果树喷药装置均采用地毯式喷药方式,此类装置会导致农药的过度使用,并造成蔬菜、果实的污染、农药浪费和环境污染。
2、综上所述,本发明提供一种针对蔬菜、果树全方位识别喷药装置及控制方法,具备智能化、自动化、通用化、一体化等特点,可以提高农药的使用效率和精确度,减少对环境和人体的危害。
技术实现思路
1、本发明所要解决的技术问题是克服现有技术中存在的不足,提供一种针对蔬菜、果树全方位识别喷药装置及控制方法,能自动识别果蔬、果树病害,自动改变平台高度和车轮间距,从而进行定位与喷药防治,能适应不同高度与种植间距的蔬菜与果树进行识别喷药任务。
2、本发明是通过以下技术方案予以实现:
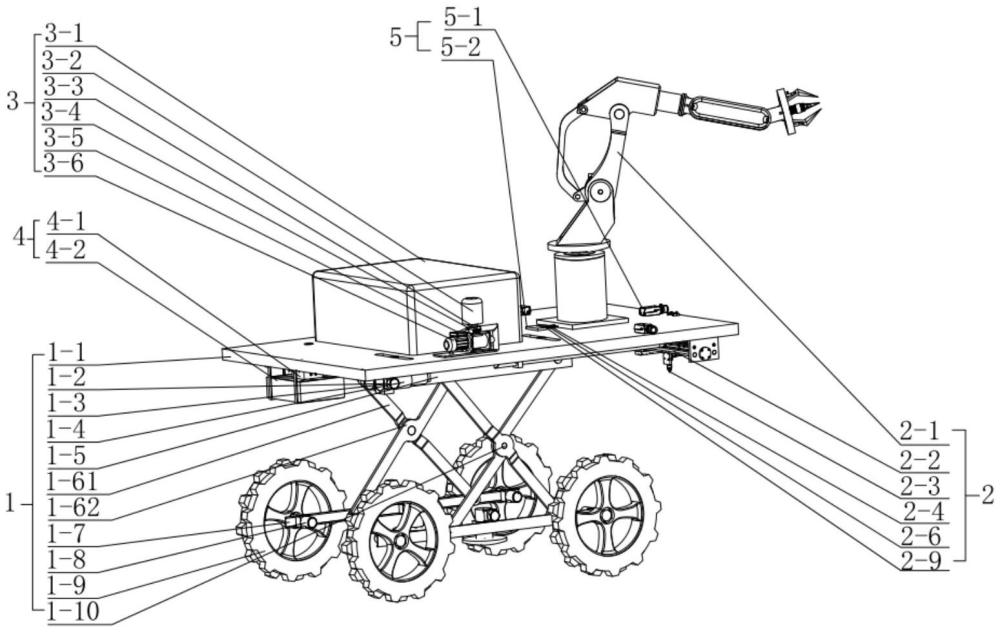
3、一种针对蔬菜、果树全方位识别喷药装置,包括:
4、可调式平台,包括车架本体、调节机构以及位于车架本体下方的车轮,所述调节机构用于调节车架本体的高度、宽度,所述车轮用于驱动所述车架本体移动;
5、喷药控制系统,包括位于所述车架本体上方的果树喷药机构以及位于车架本体下方的蔬菜喷药机构,所述果树喷药机构、蔬菜喷药机构分别包括电磁阀和喷头,用于为蔬菜、果树喷药;
6、供药系统,安装在所述车架本体上方,包括药箱、稳压罐、过滤器、压力表、药泵控制器、水泵、管道、软管、多口水管连接器,所述供药系统通过软管向所述果树喷药机构、蔬菜喷药机构供药;
7、图像识别系统,包括视觉摄像头和微型计算机,所述视觉摄像头用于采集蔬菜、果树的图像信息,并通过所述微型计算机进行分析处理,再控制所述可调式平台、喷药控制系统、供药系统、动力系统完成喷药;
8、动力系统,安装于所述车架本体下方,用于为所述可调式平台、喷药控制系统、供药系统、图像识别系统供电。
9、根据上述技术方案,优选地,所述调节机构包括相对安装于车架本体下方的两个平台支架固定板、两个车轮固定板、中部交叉铰接于平台支架固定板和车轮固定板之间的平台下支架、平台上支架;所述平台下支架一端与平台支架固定板通过滑轮相连接,另一端与车轮固定板转动连接,所述平台上支架一端与平台支架固定板转动连接,另一端与车轮固定板通过滑轮相连接;所述调节机构通过液压电机驱动调节所述车架本体的高度、宽度。
10、根据上述技术方案,优选地,所述车轮连接有驱动电机,安装于所述车轮固定板上。
11、根据上述技术方案,优选地,所述果树喷药机构为机械臂结构,所述电磁阀和喷头设于机械臂结构的端部,所述机械臂结构的端部还设置有视觉摄像头。
12、根据上述技术方案,优选地,所述蔬菜喷药机构为滑台结构,所述电磁阀和喷头与滑台相连接并朝下设置。
13、根据上述技术方案,优选地,所述喷药控制系统还包括微控制器、滑台控制器、继电器、机械臂控制器;通过所述微型计算机将视觉摄像头采集的图像信息进行分析处理后传递给所述微控制器,再控制所述可调式平台、喷药控制系统、供药系统、动力系统完成喷药。
14、根据上述技术方案,优选地,所述动力系统包括电压调节器和电瓶,所述电瓶通过电瓶支架安装于车架本体下方,并通过所述电压调节器为可调式平台、喷药控制系统、供药系统、图像识别系统供电。
15、本申请还公开了一种针对蔬菜、果树全方位识别喷药装置的控制方法,基于上述一种针对蔬菜、果树全方位识别喷药装置,包括如下步骤:
16、s1.在所述可调式平台行进时,所述视觉摄像头对前方蔬菜和果树的种植间距进行图像数据采集,并传输数据至所述微型计算机进行分析处理,再根据算法决策将信号传递给所述微控制器;
17、s2.所述微控制器能够驱动所述可调式平台的调节机构调节车架本体的高度、宽度;
18、s3.所述图像识别系统采集并检测出蔬菜、果树中的病害图像并精准定位,通过所述微控制器控制喷药控制系统、供药系统进行喷药操作;
19、s4.所述微型计算机接收并分析视觉摄像头采集的图像信息中是否存在未喷药的蔬菜、果树,直至对全部检测出病害图像的蔬菜、果树完成喷药操作。
20、根据上述技术方案,优选地,步骤s3包括:
21、s31.所述视觉摄像头采集蔬菜、果树图像,检测出蔬菜、果树中的病害图像并确定其位置和高度,并传输数据至微型计算机进行分析处理;
22、s32.所述微型计算机根据算法决策将信号传递给微控制器,所述微控制器驱动所述可调式平台的调节机构调节车架本体的高度;
23、s33.所述微控制器接收到微型计算机发出的位置信息后,控制滑台结构或机械臂结构将喷头牵引到病害蔬菜、果树的位置,并通过继电器控制电磁阀打开,使药液经过供药系统后经喷头雾化后洒出;
24、s34.施药完成后,所述微控制器控制滑台控制器驱动滑台结构将喷头牵引回初始位置;所述微控制器控制机械臂控制器驱动使机械臂结构回到初始状态。
25、本发明的有益效果是:
26、本发明将深度卷积神经网络技术应用于农业生产活动中,使病害的监测、诊断、定位、喷药等操作集成一体化,使农业作业任务更加高效、精确和节约劳动成本;采用图像识别、精准喷药技术可以实现各种蔬菜类农作物和树木类农作物,其不局限于单一作物的某一种病害;通过有效的精确喷药,减少资源浪费,降低生产成本;同时,减小农药的使用,降低了土壤和水资源的污染,有效的保证了人体的健康和生态平衡,符合人与自然可持续发展战略;
27、本发明采用图像识别、精准喷药技术可以提高农药喷洒效果、节约农药使用量、提高农药利用率、降低环境污染、提高作物质量、提高农业生产效率;
28、本发明可实现平台高度可调、车轮间距可调,机械臂对不同高度果树进行喷药,将蔬菜和果树的喷药任务集成一体化,能适应不同高度与种植间距的蔬菜与果树进行识别喷药;
29、本发明基于模块化方案进行设计,结构简单,成本低,各零部件更换方便,便于维护和后续升级,同时采用电动四轮驱动,省去了传动装置,结构简单,转向灵活,机动性能好,能适应狭窄地形区域及封闭性种植领域内喷药任务。
技术特征:1.一种针对蔬菜、果树全方位识别喷药装置,其特征在于,包括:
2.根据权利要求1所述一种针对蔬菜、果树全方位识别喷药装置,其特征在于,所述调节机构包括相对安装于车架本体下方的两个平台支架固定板、两个车轮固定板、中部交叉铰接于平台支架固定板和车轮固定板之间的平台下支架、平台上支架;
3.根据权利要求2所述一种针对蔬菜、果树全方位识别喷药装置,其特征在于,所述车轮连接有驱动电机,安装于所述车轮固定板上。
4.根据权利要求1所述一种针对蔬菜、果树全方位识别喷药装置,其特征在于,所述果树喷药机构为机械臂结构,所述电磁阀和喷头设于机械臂结构的端部,所述机械臂结构的端部还设置有视觉摄像头。
5.根据权利要求4所述一种针对蔬菜、果树全方位识别喷药装置,其特征在于,所述蔬菜喷药机构为滑台结构,所述电磁阀和喷头与滑台相连接并朝下设置。
6.根据权利要求5所述一种针对蔬菜、果树全方位识别喷药装置,其特征在于,所述喷药控制系统还包括微控制器、滑台控制器、继电器、机械臂控制器;
7.根据权利要求1所述一种针对蔬菜、果树全方位识别喷药装置,其特征在于,所述动力系统包括电压调节器和电瓶,所述电瓶通过电瓶支架安装于车架本体下方,并通过所述电压调节器为可调式平台、喷药控制系统、供药系统、图像识别系统供电。
8.一种针对蔬菜、果树全方位识别喷药装置的控制方法,基于权利要求6所述一种针对蔬菜、果树全方位识别喷药装置,其特征在于,包括如下步骤:
9.根据权利要求8所述一种针对蔬菜、果树全方位识别喷药装置的控制方法,其特征在于,步骤s3包括:
10.根据权利要求9所述一种针对蔬菜、果树全方位识别喷药装置的控制方法,其特征在于,步骤s3还包括:
技术总结本发明涉及一种针对蔬菜、果树全方位识别喷药装置及控制方法,包括:可调式平台,包括车架本体和调节机构,调节机构用于调节车架本体的高度、宽度;喷药控制系统,包括果树喷药机构和蔬菜喷药机构,用于为蔬菜、果树喷药;供药系统,用于向喷药控制系统供药;图像识别系统,包括视觉摄像头和微型计算机,用于采集蔬菜、果树的图像信息,并通过微型计算机进行分析处理,再控制可调式平台、喷药控制系统完成喷药;动力系统,用于为喷药装置供电。本发明结合图像识别引导的喷药控制方法,能自动识别果蔬、果树病害,自动改变平台高度和车轮间距,从而进行定位与喷药防治,能适应不同高度与种植间距的蔬菜与果树进行识别喷药,提高农药的使用效率。技术研发人员:朱圻昕,袁显举,孙明明,王佩琦受保护的技术使用者:湖北汽车工业学院技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/329228.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表