基于连续时间序列时差估计与贝叶斯滤波的三星定位方法与流程
- 国知局
- 2024-11-19 09:39:06
本发明属于卫星通信技术中的无源定位,尤其涉及三星无源定位技术。
背景技术:
1、无源定位由于其不发射电磁波,完全被动工作,具有隐蔽性好的特点。随着卫星通信技术的快速发展,出现了以卫星为平台的无源定位技术。卫星无源定位技术不受地形影响,且探测区域大,能有效对地面辐射源实施定位,在电子侦察领域得到重视。
2、三星定位技术是应用较多的无源定位方案。地面辐射源向空间发射的信号经由三颗同步轨道卫星接收,其中一颗卫星作为主星,另外两颗卫星作为邻星。由于距离不同,信号到达三颗卫星存在时差,可构建时间差双曲线,这些双曲线的交点即为地面辐射源。三星定位系统使用了较少的卫星颗数,卫星组网能力强,定位原理简单且容易实现,使得整个定位系统的成本大幅度降低。
3、定位解算过程可以在星上也可以在地面处理中心,在星上处理时,卫星间通信时间较短,可实现更加实时的定位,与此同时,在卫星解算会给卫星增加星上处理压力;通过地面传感器接收卫星透明转发信号,该传感器有三个通道可同时接收三颗卫星的信号并输出至后端计算单元。在地面处理中心解算辐射源位置时,卫星向处理中心传输接收到的辐射源信息时间更长,但有效减小星上的处理压力,实际系统一般都是卫星接收信号并转发,由地面完成定位过程。
4、传统三星定位技术方法存在以下不足:
5、一是星历不准确,反推的卫星位置与实际位置存在较大误差,这会作为系统误差在后续解算过程中积累,最终导致定位结果精度下降且无法通过平差的方式进行校正。同时,对卫星位置的高精度测量需要额外建造专用的测轨系统,投入成本高;
6、二是未考虑移动目标动态信息约束。当前定位技术将地面辐射源视为相对地面静止的目标,没有使用目标运动信息对定位结果进行修正,使得目标定位结果精度下降;
7、三是没有校正系统级时差。信号被传感器接收存储为数字文件的时间会被高精度授时设备记录并标记在数字文件中。传感器接收信号的过程实际上包括了信号到达天线,信号通过线缆传输,经过若干台包括变频器、功分器等中间设备,最后由采集设备转换为数字文件。定位解算使用的是信号到达传感器的时刻,信号经过中间设备需要经过很短的处理时间,由于设备不一致使得三个通道的信号采集时间有误差,最终导致时差估计结果存在系统级误差;
8、四是没有对多普勒效应进行修正,使得时差估计结果出现偏差。
9、以上因素均会导致定位系统的定位精度下降。
技术实现思路
1、本发明目的在于提供一种基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,以解决传统三星定位技术方法中存在的定位精度下降问题。
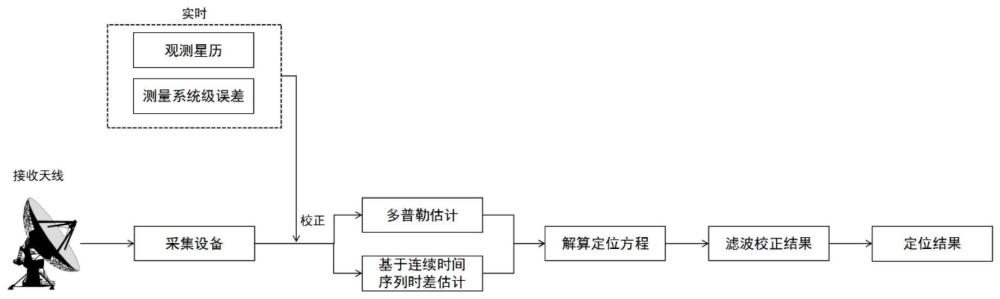
2、传统三星定位解算步骤包括:传感器接收信号,通过星历数据计算卫星位置,进行参估计算,解算辐射源位置。针对现有方案若干环节中存在的不足,为实现上述目的,本发明的基于连续时间序列时差估计与贝叶斯滤波的三星定位方法的具体技术方案如下:
3、定期测量系统级误差,获取各通道传输延迟,获得系统级误差的校正参数;
4、建立星历校正模型,获得星历校正参数;
5、采集目标信号,利用连续时间序列时差估计与多普勒频差估计实现参数估计,通过所述系统级误差的校正参数校正系统级误差;
6、构建球面约束下辐射源空间直角坐标与参估结果的函数关系,采用高斯-牛顿迭代方法进行位置解算,使用所述星历校正模型获得的星历校正参数对星历进行修正;
7、结合目标运动状态,使用贝叶斯滤波对位置结果进行校正。
8、进一步地,所述定期测量系统级误差还包括:以主星使用的通道为基准,测量主星通道与其他通道之间的传输时差,多次测量传输时差并取均值,将测量结果用于系统级误差的校正。
9、进一步地,所述建立星历校正模型还包括:建立定位结果的位置概率模型,然后通过非线性变换,获取卫星的位置概率模型,通过后验贝叶斯模型计算获得星历校正参数。
10、进一步地,在利用连续时间序列时差估计与多普勒频差估计实现参数估计时,还包括:使用以下快速算法进行计算,对辐射源的目标信号进行数学建模和推导:
11、
12、其中,表示傅里叶变换运算,表示复共轭信号的傅里叶变换,τ是时差、f是频差,l、k为遍历标号,取整数,取值为遍历的范围,u(n)和v(n)代表两个通道的信号,ej2πmn/n代表正弦信号。
13、进一步地,在构建球面约束下辐射源空间直角坐标与参估结果的函数关系时,所述函数关系为:
14、
15、其中,c代表光速,τ为校正后的参估结果,x,y,z代表辐射源位置,xi,yi,zi代表第i颗卫星位置,i=1,2,3,γ代表地球长半径,h代表辐射源高程,e代表地球偏心率。
16、进一步地,在采用高斯-牛顿迭代方法进行位置解算时,所述解算过程表示如下:
17、uk+1=uk+f-1(uk)f(uk)
18、其中,
19、
20、g=[rr(1-e2)r]t
21、上式为定位方程,其中,u代表迭代的辐射源位置,k是迭代次数,p1、p2、p3代表卫星位置,r代表地球长半径,e代表地球偏心率,g为地球表面约束。
22、进一步地,通过投影变换,将结果转换为经纬度坐标。
23、进一步地,所述目标运动状态为静止辐射源,采用其位置等权平均值作为定位点的校正值。
24、进一步地,所述目标运动状态为运动,使用多段直线段拟合目标运动轨迹,将轨迹点标记到各段拟合线段,根据运动学方程,采用匀速或变速运动模型对分段轨迹点进行贝叶斯滤波处理。
25、本发明的基于连续时间序列时差估计与贝叶斯滤波的三星定位方法具有以下优点:本发明通过完善三星定位误差模型,对系统性误差,星历误差等进行修正,通过连续时间序列时差-多普勒偏差参数估计提升三星定位时差估计精度。通过解算位置方程,利用目标运动状态校正位置结果,获得更准确的静止目标位置和更平滑的移动目标轨迹。
技术特征:1.一种基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,其特征在于,所述定期测量系统级误差还包括:以主星使用的通道为基准,测量主星通道与其他通道之间的传输时差,多次测量传输时差并取均值,将测量结果用于系统级误差的校正。
3.根据权利要求1所述的基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,其特征在于,所述建立星历校正模型还包括:建立定位结果的位置概率模型,然后通过非线性变换,获取卫星的位置概率模型,通过后验贝叶斯模型计算获得星历校正参数。
4.根据权利要求1所述的基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,其特征在于,在利用连续时间序列时差估计与多普勒频差估计实现参数估计时,还包括:使用以下快速算法进行计算,对辐射源的目标信号进行数学建模和推导:
5.根据权利要求1所述的基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,其特征在于,在构建球面约束下辐射源空间直角坐标与参估结果的函数关系时,所述函数关系为:
6.根据权利要求1所述的基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,其特征在于,在采用高斯-牛顿迭代方法进行位置解算时,所述解算过程表示如下:
7.根据权利要求1所述的基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,其特征在于,还包括:通过投影变换,将结果转换为经纬度坐标。
8.根据权利要求1所述的基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,其特征在于,还包括:所述目标为静止辐射源,采用其位置等权平均值作为定位点的校正值。
9.根据权利要求1所述的基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,其特征在于,还包括:所述目标运动状态为运动,使用多段直线段拟合目标运动轨迹,将轨迹点标记到各段拟合线段,根据运动学方程,采用匀速或变速运动模型对分段轨迹点进行贝叶斯滤波处理。
技术总结本发明属于无源定位技术领域,公开了一种基于连续时间序列时差估计与贝叶斯滤波的三星定位方法,定期测量系统级误差,获取各通道传输延迟,获得系统级误差的校正参数;建立星历校正模型,获得星历校正参数;采集目标信号,利用连续时间序列时差估计与多普勒频差估计实现参数估计,通过所述系统级误差的校正参数校正系统级误差;使用所述星历校正模型获得的星历校正参数对星历进行修正,构建球面约束下辐射源空间直角坐标与参估结果的函数关系,采用高斯‑牛顿迭代方法进行位置解算,获得辐射源的位置结果;结合目标运动状态,使用贝叶斯滤波对位置结果进行校正。本发明能够提升三星定位时差估计精度,获得更准确的静止目标位置和更平滑的移动目标轨迹。技术研发人员:王云龙,刘万贤,梁啟文,乐少聪,石为中受保护的技术使用者:中国人民解放军61565部队技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/329643.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。