一种用于LCL滤波器的高速电机系统的快速电流控制方法、电子设备、以及存储介质
- 国知局
- 2024-11-21 11:38:27
本发明属于永磁同步电机系统的快速电流控制领域,具体涉及一种用于lcl滤波器的高速电机系统的快速电流控制方法、电子设备、以及存储介质。
背景技术:
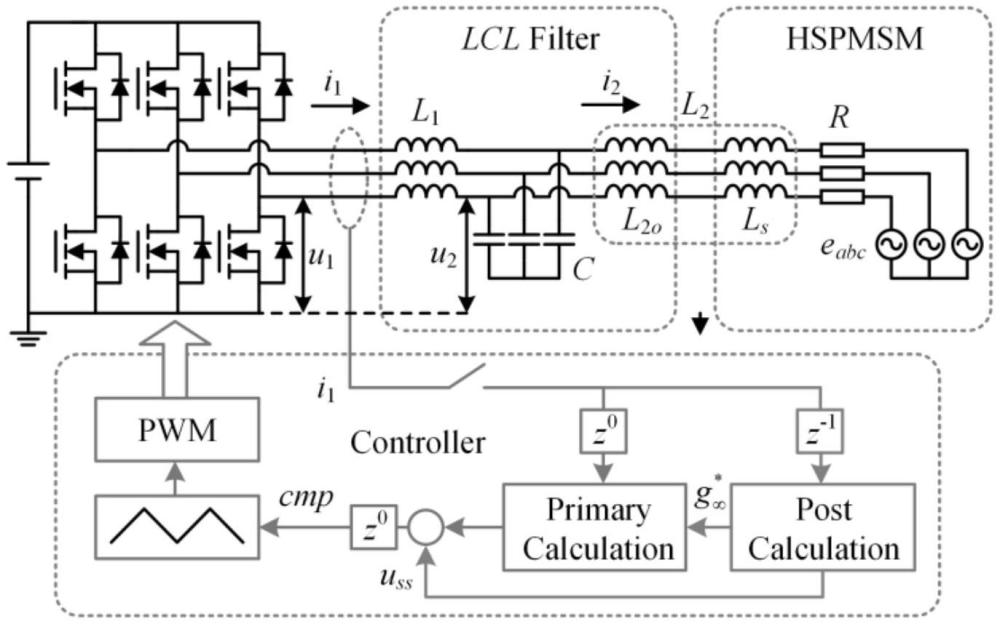
1、高速表贴式永磁同步电机(high-speed permanent magnet synchronousmachine,hspmsm)因其高功率密度和高效率,广泛应用于各类工业场合。然而,这种电机的低电感特性在脉宽调制(pwm)过程中容易引起电流波动,从而导致额外的功率损耗和转矩波动。为了解决这一问题,通常在逆变器与电机之间插入电感-电容-电感(lcl)滤波器,形成完整的lcl-hspmsm系统。尽管lcl滤波器在减小电流波动方面效果显著,但其高阶特性显著增加了系统的复杂性,给控制器的设计带来了困难。
2、lcl电路引入的谐振峰值可能会使电流控制回路不稳定,特别是在仅使用逆变器电流反馈(inverter current feedback,icf)的lcl-hspmsm系统中,由于电频率较高,谐振频率通常高于采样频率的六分之一。在这种情况下,由于计算延迟,系统固有的不稳定性需要主动阻尼(active damping,ad)来解决。现有的主动阻尼策略包括谐振极点对消、全状态反馈控制(full state feedback control,fsfc)、虚拟电阻和基于滤波器的阻尼方法。这些方法各有优缺点,但通常依赖于系统参数的准确性,参数失配可能会显著影响其阻尼性能。因此,减少计算延迟是一种有效的提高系统稳定性的方法。
技术实现思路
1、本发明针要解决的技术问题是:仅使用逆变器电流反馈(icf)的lcl-hspmsm系统中,lcl电路引入的谐振峰值会使电流控制回路不稳定的问题,提供了一种用于lcl滤波器的高速电机系统的快速电流控制方法、电子设备、以及存储介质,提高系统的稳定性和带宽。
2、为解决以上技术问题,本发明提供如下技术方案:一种用于lcl滤波器的高速电机系统的快速电流控制方法,包括以下步骤:
3、s1、建立lcl滤波器的高速电机系统模型,分析系统在计算延迟情况下的稳定性,具体包括:基于构建的逆变器侧电感模型、滤波器电容模型、以及电机侧电感的模型建立高速电机系统模型,然后将高速电机系统模型由连续时间模型转换为离散时间模型,并考虑电机电阻对低频段的影响;
4、s2、构建二自由度电流控制策略:引入前馈控制器,用于实现动态解耦,引入相位增益补偿器,用于补偿由计算延迟引起的相位滞后;
5、s3、针对控制器进行主要计算和后处理以消除延迟,实现快速电流控制:主要计算具体是计算系统的电流误差和控制输出;后处理具体是对控制输出进行相位增益补偿。
6、进一步地,前述的步骤s1包括以下子步骤:
7、s101、在静态坐标系下,将逆变器侧电压到逆变器侧电流的连续时间传递函数化简,如下:
8、
9、其中,ωres为谐振角频率,gpsl(s)和gpsh(s)分别对应系统传递函数的低频部分和高频部分,r为绕组电阻,l1为逆变器侧电感,c为滤波电容,l2为电机侧电感,l2包括滤波电感l2o和电机电感ls,s指拉普拉斯变换中的复数变量;
10、s102、将连续域传递函数通过零阶保持离散化得到静止坐标系下系统的精确离散化模型:
11、gps(z)=gpsl(z)+gpsh(z),
12、
13、其中,t,δ,λ分别是控制周期,解耦系数,增益系数,z指z变换的对应变量;gps(z),gpsl(z),gpsh(z)分别为系统传递函数,低频段传递函数,高频段传递函数;
14、s103、针对离散化模型,应用频率迁移z→zejωt,获得系统在同步旋转坐标系的精确离散域传递函数为:
15、
16、其中,指系统从静止坐标系变换指旋转坐标系时的相移系数,gp(z),gpl(z),gph(z)分别是离散与下的系统传递函数,低频段传递函数,高频段传递函数。
17、进一步地,前述的步骤s101中,系统传递函数的低频部分gpsl(s)和系统传递函数的高频部分gpsh(s),计算如下式:
18、进一步地,前述的步骤s101中,谐振角频率ωres计算如下式:
19、进一步地,前述的步骤s2具体为:通过相位增益补偿离散域pi控制器的相移,利用额外的自由度专门解决dq轴动态响应中的耦合效应,计算各控制器的传递函数如下:
20、
21、其中,k,gc(z),gpg(z),gff(z),分别是系统增益,主控制器,相位增益,前馈控制器,系统闭环传递函数的逆。
22、进一步地,前述的步骤s3包括以下子步骤:
23、s301、将闭环控制器分解为如下两部分:
24、
25、其中,kpggc(z),g∞为直通增益,为一种严格有理的传递函数;
26、s302、将c(z)拆分为z-1和z-1为一周期延时,有理的传递函数;
27、s303、基于可达误差进行信号抗饱和,并实现对控制器进行重构,计算dq坐标系下的输出电压,如下式:
28、
29、其中,uss,dq为历史状态,是前馈控制器在一周期延时下的输出,i1dq表示dq坐标系下逆变器侧电流;
30、s304、将控制器改为在αβ坐标系中实现,其中前馈部分在uss中简化,αβ坐标系中的输出电压计算如下式:
31、
32、其中,i1αβ,uss,αβ分别表示为αβ静止坐标系下的逆变器侧电流和前馈电压;
33、s305、通过零序注入方法实现空间矢量pwm调制,注入的零序分量为;
34、
35、其中,maxd'abc,mind'abc分别表示三相占空比的最大值和最小值。
36、本发明另一方面提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明中任一项所述方法的步骤。
37、本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现本发明中任一项所述方法的步骤。
38、相较于现有技术,本发明采用以上技术方案的有益技术效果如下:
39、1.提高系统稳定性:通过减少计算延迟和引入前馈控制,实现动态解耦和系统的强稳定性。
40、2.提高系统带宽:引入相位增益补偿器,有效补偿计算延迟引起的相位滞后,提高系统带宽。
41、3.强鲁棒性:控制器设计不依赖于系统的谐振频率等高频参数,因此在谐振频率显著变化的情况下仍具有强鲁棒性。
42、4.广泛适用性:适用于显著的参数失配,参数范围从标称值的0.3到3倍,仍能保持系统的强稳定性。
技术特征:1.一种用于lcl滤波器的高速电机系统的快速电流控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种用于lcl滤波器的高速电机系统的快速电流控制方法,其特征在于,步骤s1包括以下子步骤:
3.根据权利要求2所述的一种用于lcl滤波器的高速电机系统的快速电流控制方法,其特征在于,步骤s101中,系统传递函数的低频部分gpsl(s)和系统传递函数的高频部分gpsh(s),计算如下式:
4.根据权利要求2所述的一种用于lcl滤波器的高速电机系统的快速电流控制方法,其特征在于,步骤s101中,谐振角频率ωres计算如下式:
5.根据权利要求2所述的一种用于lcl滤波器的高速电机系统的快速电流控制方法,其特征在于,步骤s2具体为:通过相位增益补偿离散域pi控制器的相移,利用额外的自由度专门解决dq轴动态响应中的耦合效应,计算各控制器的传递函数如下:
6.根据权利要求2所述的一种用于lcl滤波器的高速电机系统的快速电流控制方法,其特征在于,步骤s3包括以下子步骤:
7.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述方法的步骤。
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述方法的步骤。
技术总结本发明提供了一种用于LCL滤波器的高速电机系统的快速电流控制方法、电子设备、以及存储介质,本发明方法包括以下步骤:首先基于构建的逆变器侧电感模型、滤波器电容模型、以及电机侧电感的模型建立高速电机系统模型。然后将高速电机系统模型由连续时间模型转换为离散时间模型,分析系统在计算延迟情况下的稳定性,构建二自由度电流控制策略,通过引入前馈控制器和相位增益补偿,实现动态解耦,并通过减少计算延迟来提高系统的稳定性和带宽。最后针对控制器进行主要计算和后处理以消除延迟,实现快速电流控制。本发明在谐振频率显著变化的情况下仍能保持系统的强稳定性,且对参数失配具有强鲁棒性。技术研发人员:程晨闻,施龙浩,花为受保护的技术使用者:东南大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/332165.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表