一种相位编码激光雷达测距测速方法与流程
- 国知局
- 2024-11-21 11:50:48
本发明涉及激光雷达测距测速,特别涉及一种相位编码激光雷达测距测速方法。
背景技术:
1、雷达在军事、民航、自动驾驶等领域具有非常重要的作用。激光雷达由于采用波长较短的激光作为信息载波,因而具有较高的分辨率,可用于对目标进行探测、跟踪和识别,以及进行测距、测速、成像。
2、对于测距测速,目前常用的方法为将本振光移频后与经连续被调频或随机幅度或相位调制的回波信号进行相干探测,通过测量多普勒频率来进行测速,通过回波信号的解调后进行互相关测距。相干激光雷达具有天然的滤波作用,使用本振光与真实信号进行相干探测,不仅可以滤除不相干的背景噪声,还具有一定的增益。然而,在远距离时由于回波信号的退相干效应较为显著,使得相干探测变得困难,日光下背景噪声的影响增加,使得系统的信噪比较低。公告号为cn118191861b的中国发明专利提出一种两脉冲相对相位编码的方式可以解决大气湍流等影响造成的退相干问题,仅需要一个不等臂干涉仪,在光脉冲信号的飞行时间内不会发生相位漂移,可以使得回波信号稳定干涉,无需额外器件和算法进行稳相。但是该方案无法对目标进行测速,且当目标运动速度较大时,多普勒频移会导致回波信号频率改变,从而导致两脉冲之间的相位发生变化,进而使得干涉解码的误码增大,影响测距性能。
技术实现思路
1、针对现有技术存在以上缺陷,本发明提出一种。
2、本发明的技术方案是这样实现的:
3、一种相位编码激光雷达测距测速方法,包括以下步骤:
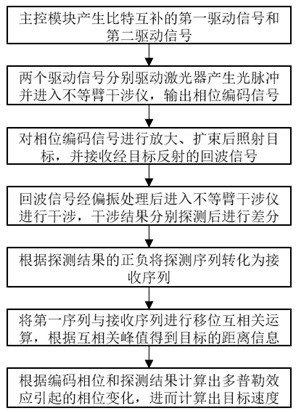
4、s1:主控模块产生比特互补的第一序列、第二序列,对应构成第一驱动信号和第二驱动信号;
5、s2:两个驱动信号分别驱动激光器产生光脉冲并进入不等臂干涉仪,输出相位编码信号;
6、s3:对相位编码信号进行放大、扩束后照射目标,并接收经目标反射的回波信号;
7、s4:回波信号经偏振处理后进入不等臂干涉仪进行干涉,干涉结果分别探测后进行差分;
8、s5:根据探测结果的正负将探测序列转化为接收序列;
9、s6:将第一序列与接收序列进行移位互相关运算,根据互相关峰值得到目标的距离信息;
10、s7:根据相位编码信号的编码相位和探测结果计算出多普勒效应引起的相位变化,进而计算出目标速度。
11、优选地,所述s1:主控模块产生一个0和1比特随机出现的第一序列,同时将第一序列中的0和1比特分别取反得到第二序列,并根据第一序列和第二序列产生用于触发对应激光器的第一驱动信号和第二驱动信号,其中0比特对应低电平,不触发激光器发射激光脉冲;1比特对应高电平,触发激光器发射激光脉冲;
12、所述s2:第一驱动信号触发对应激光器发出激光脉冲信号,进入不等臂干涉仪第一输入端口,产生相位差为0的第一双子脉冲信号;第二驱动信号触发对应激光器发出激光脉冲信号,进入不等臂干涉仪第二输入端口,产生相位差为π的第二双子脉冲信号;第一双子脉冲信号和第二双子脉冲信号随机从不等臂干涉仪第一输出端口出射,形成相位编码信号;
13、所述s3:相位编码信号经光放大模块放大至预定功率,并通过发射望远镜扩束后向目标照射,使用接收望远镜接收从目标反射的回波信号;
14、所述s4:回波信号经偏振处理后,进入不等臂干涉仪进行干涉,产生的两路干涉信号分别进入对应探测模块进行探测,并使用差分电路将两个探测结果进行差分得到探测序列;
15、所述s5:根据探测结果的正负将探测序列转化为接收序列,其中大于0的结果为0,小于0 的结果为1,等于0的结果随机赋值为0或1;
16、所述s6:将所述第一序列与接收序列进行移位互相关运算,根据互相关运算结果达到峰值对应的位置得到目标的距离信息
17、所述s7:根据编码相位α和探测结果,计算出由于多普勒效应引起的相位变化,进而计算出目标的速度为,其中λ为激光脉冲的中心波长,c为光速,n为光纤折射率,δl为不等臂干涉仪的臂长差。
18、优选地,所述s4中偏振处理为透过水平偏振的起偏器对回波信号进行起偏;经起偏后的回波信号正向通过光隔离器,并从不等臂干涉仪的第二输出端口进入,进行干涉,产生的两路干涉信号各通过一个环形器进入第一探测模块和第二探测模块进行探测,并使用差分电路将两个探测结果进行差分得到探测序列。
19、优选地,所述s4中偏振处理为对回波信号进行偏振分束;经偏振分束后的一路回波信号分量正向通过光隔离器,并从不等臂干涉仪的第二输出端口进入,进行干涉;另一路回波信号分量经过一个环形器从不等臂干涉仪的第一输出端口进入,进行干涉;产生的两路干涉信号各通过一个环形器进入第一探测模块和第二探测模块进行探测,并使用差分电路将两个探测结果进行差分得到探测序列。
20、与现有技术相比,本发明有以下有益效果:
21、本发明提出一种相位编码激光雷达测距测速方法,通过对激光脉冲信号进行相位编解码,通过高灵敏度的平衡探测器探测解码后的回波信号进行差分,不仅可以大幅度降低回波信号中背景噪声,提高系统测距的信噪比,还可以直接通过干涉结果计算出目标运动的多普勒频移导致的相位变化,从而获得目标的速度。
技术特征:1.一种相位编码激光雷达测距测速方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的相位编码激光雷达测距测速方法,其特征在于,所述s1:主控模块产生一个0和1比特随机出现的第一序列,同时将第一序列中的0和1比特分别取反得到第二序列,并根据第一序列和第二序列产生用于触发对应激光器的第一驱动信号和第二驱动信号,其中0比特对应低电平,不触发激光器发射激光脉冲;1比特对应高电平,触发激光器发射激光脉冲;
3.根据权利要求2所述的相位编码激光雷达测距测速方法,其特征在于,所述s4中偏振处理为透过水平偏振的起偏器对回波信号进行起偏;经起偏后的回波信号正向通过光隔离器,并从不等臂干涉仪的第二输出端口进入,进行干涉,产生的两路干涉信号各通过一个环形器进入第一探测模块和第二探测模块进行探测,并使用差分电路将两个探测结果进行差分得到探测序列。
4.根据权利要求2所述的相位编码激光雷达测距测速方法,其特征在于,所述s4中偏振处理为对回波信号进行偏振分束;经偏振分束后的一路回波信号分量正向通过光隔离器,并从不等臂干涉仪的第二输出端口进入,进行干涉;另一路回波信号分量经过一个环形器从不等臂干涉仪的第一输出端口进入,进行干涉;产生的两路干涉信号各通过一个环形器进入第一探测模块和第二探测模块进行探测,并使用差分电路将两个探测结果进行差分得到探测序列。
技术总结本发明属于激光雷达测距测速技术领域,公开了一种相位编码激光雷达测距测速方法,比特互补的两个驱动信号分别驱动产生光脉冲并进入不等臂干涉仪,输出相位编码信号并照射目标,接收经目标反射的回波信号;回波信号经偏振处理后进行干涉,干涉结果进行差分;根据探测结果的正负将探测序列转化为接收序列;将第一序列与接收序列进行移位互相关运算,根据互相关峰值得到目标的距离信息;根据编码相位和探测结果计算出多普勒效应引起的相位变化,进而计算出目标速度。与现有技术相比,本发明不仅可以大幅度降低回波信号中背景噪声,提高系统测距的信噪比,还可以直接通过干涉结果计算出目标运动的多普勒频移导致的相位变化,从而获得目标的速度。技术研发人员:赵义博,丁瑶,陈东升,屈秀秀受保护的技术使用者:北京中科国光量子科技有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/332995.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表