一种车载毫米波雷达数据采集与回灌方法
- 国知局
- 2024-11-21 11:58:14
本发明属于毫米波雷达,具体为一种车载毫米波雷达数据采集与回灌方法。
背景技术:
1、随着毫米波雷达的快速发展,业内技术不断更新迭代,硬件在环系统(hil)已经变得尤为重要,使用该系统能够缩短研发周期,节约人力以及开发成本。对于毫米波雷达来说,通常为数据的adc采集与回灌。
2、在现有的毫米波雷达硬件在环系统中,需要手动的去改变毫米波雷达的工作模式,有时需要更换毫米波雷达的工作进程文件,最麻烦的时候还需要拆卸雷达让两台雷达对接来完成回灌功能,无法通过一台雷达来完成数据的采集与回灌,这不仅非常不方便且缺乏灵活度,会使得hil的测试时间大大增加,给测试带来不便,因此需要一种方式来切换毫米波雷达的这两种工作模式。
3、而且,在现有的测试环境下,只通过回灌所采集到的adc数据,无法验证所采集到的数据是否存在数据错误或者丢帧的情况。
技术实现思路
1、本发明提出了一种车载毫米波雷达数据采集与回灌方法。
2、实现本发明目的的技术方案为:一种车载毫米波雷达数据采集与回灌方法,具体步骤为:
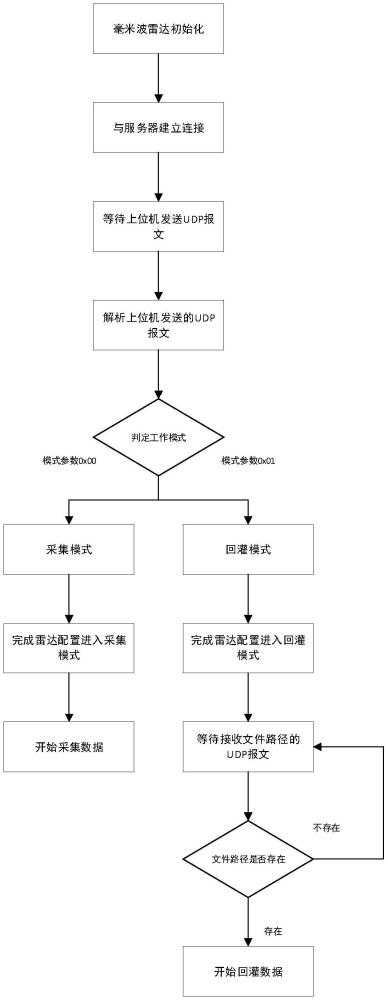
3、步骤1:毫米波雷达启动运行采集与回灌进程,进行相关配置的初始化,等待与服务器进行连接以及工作模式的配置指令;
4、步骤2:pc上位机通过目的ip地址,本地ip地址,以及端口号与毫米波雷达建立连接;
5、步骤3:服务端与毫米波雷达建立连接后,按照通信协议,将配置文件的参数进行组包,并通过udp发给毫米波雷达;
6、步骤4:毫米波雷达在收到服务器发来的udp数据后,按照通信协议对其进行拆解,并完成对工作模式的选择,进入采集模式或者回灌模式。
7、优选地,采集模式具体为:毫米波雷达进入数据采集模式,毫米波雷达在ssd中创建当前时间节点的采集文件夹,从ddr地址里取得adc数据,并通过pcie协议按照顺序将adc数据存入到采集文件夹中,且不会影响雷达的正常输出点云功能,雷达通过udp按照发送的点云协议将点云数据发往服务器,同时将点云数据结果保存在服务器端。
8、优选地,雷达在采集模式下的具体步骤为:
9、进入采集模式,雷达按照参数初始化雷达射频前端,并开辟三个线程,包括采集adc数据线程,存储adc数据线程以及雷达数据处理线程;
10、雷达射频前端按照采集adc数据线程采集adc数据;
11、存储adc数据线程以及雷达数据处理线程分别读取存储在ddr的adc数据,存储adc线程将读取到的adc数据存储至ssd固态硬盘中,数据处理线程对数据进行3dfft处理,得到点云数据;
12、点云传输协议将处理完的点云数据发送给服务端,并在服务端进行保存。
13、优选地,采集adc数据线程每次采集到的一帧adc数据的bin文件为16mb,由雷达数据处理板存储在ddr中。
14、优选地,回灌模式具体为:
15、毫米波雷达进入数据回灌模式,等待接收服务器端的发送包含需回灌文件夹路径的udp报文;
16、毫米波雷达进入数据回灌模式,毫米波雷达统计指定文件夹路径中的adc文件个数,从ssd中按照顺序读取adc数据,将其放入到指定的ddr地址中,并按照点云协议将点云数据发往服务端,同时将点云数据结果保存在服务器端,直到回灌完指定文件夹内的所有adc数据;
17、优选地,雷达在回灌模式下的具体步骤为:
18、步骤7.1:进入回灌模式,开辟回灌adc数据线程以及雷达数据处理线程;
19、步骤7.2:根据解析到的目的文件地址,将采集到的数据从ssd搬运至ddr的0x50000000地址位置;
20、步骤7.3:数据处理线程在收到信号量后,从ddr读取到数据后,对数据进行3dfft处理,得到点云数据;
21、步骤7.4:点云传输协议将处理完的点云数据发送给服务端,并在服务端进行保存。
22、优选地,雷达的采集与回灌功能集成于一个进程,并运行于petalinux系统。
23、优选地,步骤3中的通信协议包括采集模式下的通信协议和回灌模式下的通信协议,采集模式下的通信协议数据包括起始位、数据码、结束位,数据码包括模式选择参数、采集参数,所述采集参数包括单个啁啾周期和单个帧周期;
24、回灌模式下的通信协议数据包括起始位、数据码、结束位,数据码包括模式选择参数、回灌参数,所述回灌参数包括回灌处理周期、单个啁啾周期和单个帧周期。
25、优选地,若需要切换工作状态,则通过服务器给雷达发送重启指令,重启后雷达跳转到步骤1。
26、本发明与现有技术相比,其显著优点为:本发明可以通过一台pc机和上位机作为服务端,一台毫米波雷达作为客户端,即可在一台雷达上完成对数据的采集与回灌功能,不需要拆卸雷达或者将采集完的数据硬盘放到另一个回灌功能的雷达中去,还可以同时在服务器端回放采集时的点云数据和回灌时输出的点云数据,方便验证采集数据的正确性,缩短研发时间。
27、下面结合附图对本发明做进一步详细的描述。
技术特征:1.一种车载毫米波雷达数据采集与回灌方法,其特征在于,具体步骤为:
2.根据权利要求1所述的车载毫米波雷达数据采集与回灌方法,其特征在于,采集模式具体为:毫米波雷达进入数据采集模式,毫米波雷达在ssd中创建当前时间节点的采集文件夹,从ddr地址里取得adc数据,并通过pcie协议按照顺序将adc数据存入到采集文件夹中,且不会影响雷达的正常输出点云功能,雷达通过udp按照发送的点云协议将点云数据发往服务器,同时将点云数据结果保存在服务器端。
3.根据权利要求2所述的车载毫米波雷达数据采集与回灌方法,其特征在于,雷达在采集模式下的具体步骤为:
4.根据权利要求3所述的车载毫米波雷达数据采集与回灌方法,其特征在于,采集adc数据线程每次采集到的一帧adc数据的bin文件为16mb,由雷达数据处理板存储在ddr中。
5.根据权利要求1所述的车载毫米波雷达数据采集与回灌方法,其特征在于,回灌模式具体为:
6.根据权利要求5所述的车载毫米波雷达数据采集与回灌方法,其特征在于,雷达在回灌模式下的具体步骤为:
7.根据权利要求1所述的车载毫米波雷达数据采集与回灌方法,其特征在于,雷达的采集与回灌功能集成于一个进程,并运行于petalinux系统。
8.根据权利要求1所述的车载毫米波雷达数据采集与回灌方法,其特征在于,步骤3中的通信协议包括采集模式下的通信协议和回灌模式下的通信协议,采集模式下的通信协议数据包括起始位、数据码、结束位,数据码包括模式选择参数、采集参数,所述采集参数包括单个啁啾周期和单个帧周期;
9.根据权利要求1所述的车载毫米波雷达数据采集与回灌方法,其特征在于,若需要切换工作状态,则通过服务器给雷达发送重启指令,重启后雷达跳转到步骤1。
技术总结本发明提供了一种车载毫米波雷达数据采集与回灌方法,包括服务端通过IP地址与端口号与毫米波雷达建立通信,并按照不同模式下的通信协议,发送UDP报文给毫米波雷达,下位机通过解析UDP报文来进入对应的工作模式。采集模式是将毫米波雷达采集到的ADC数据转存至SSD中,并对该ADC数据进行数据处理,输出点云结果并保存在服务端;回灌模式是将毫米波雷达SSD中的ADC数据搬运至DDR中,并对ADC数据进行数据处理,输出点云结果并保存在服务端,最后可以通过服务端同时放采集与回灌的点云数据。本发明实现的采集与回灌测试方式,大大降低了测试成本,减少了数据验证的时间,来对雷达进行功能验证以及性能评估等。技术研发人员:彭树生,周韬受保护的技术使用者:南京理工大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/333631.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。