一种舰船推进电机预设超螺旋无位置传感器控制方法与流程
- 国知局
- 2024-11-21 12:11:19
本发明涉及舰船推进电机控制领域,特别涉及舰船方面的基于预设超螺旋观测器的一种舰船推进电机预设超螺旋无位置传感器控制方法。
背景技术:
1、永磁同步电机作为一种高效、低能耗的电机类型,在电推舰船中有重要的使用价值。无位置传感器控制技术是电机在运行过程中通过实时检测定子电压、定子电流等信息估计转子位置和转速信息,取消了传统的机械传感器,不仅节约了电机控制系统占用的空间和所需投入的成本,还提高了电机控制系统的可靠性。传统的滑模控制可以实现快速动态响应且具有强大的鲁棒性,但切换增益较大时可保证系统的稳定性和提高抗干扰能力,却会导致控制信号不连续、抖振现象严重,而结合自适应算法或者锁相环结构后导致系统结构复杂,系统收敛时间受系统状态影响。此外,相比于普通的陆上电机,舰船推进电机使用环境更恶劣、工况变化更频繁,系统受诸多内外部扰动影响,传统的滑模控制器和收敛跟踪算法不能满足实际需求。因此,需要寻求新的控制方法,实现电机控制系统对估计精度和收敛时间的更高要求。
2、专利cn116208040a公开了一种基于全阶终端滑模的转速自适应观测方法,该控制方法解决了永磁同步电机在高速时观测速度慢、抖振大的问题,但全解终端滑模观测器设计较为复杂,系统的有限时间稳定跟系统参数相关。专利cn114528669a公开了一种基于预设时间稳定的永磁同步电机超螺旋控制器设计方法,实现了在不受电机参数影响情况下的系统稳定,但未将超螺旋算法应用观测器进行转子位置的估计。
技术实现思路
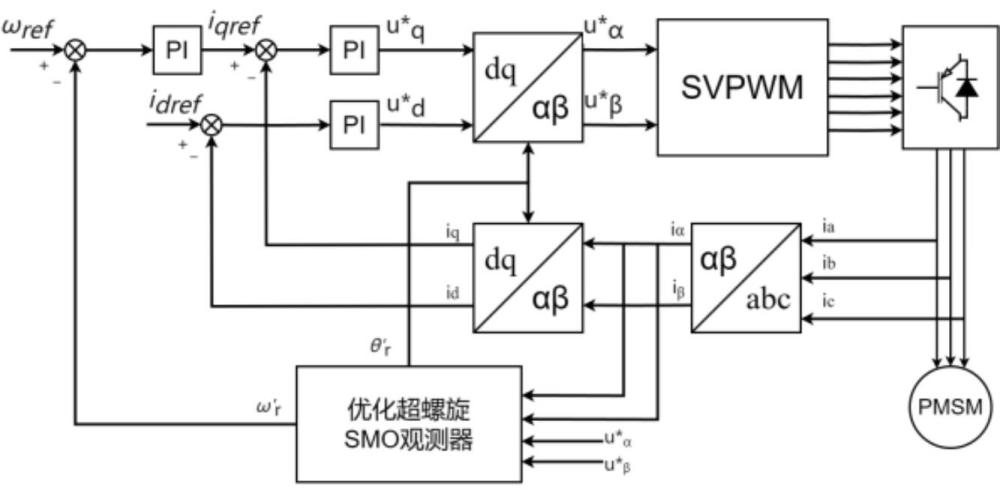
1、本发明的目的提供一种舰船推进电机预设超螺旋无位置传感器控制方法,该方法结合了超螺旋滑模观测器原理与预设时间控制技术,可以实现人为地控制电机转子的估计值与实际值之间误差的收敛时间,使该收敛时间不受系统中其他参数的影响,实现了永磁同步电机较为精确、快速地无位置传感器控制。
2、本发明叙述的一种舰船推进电机预设超螺旋无位置传感器控制方法,包括:
3、动力学建模,建立永磁同步电机的系统状态方程;
4、引入开关函数对新型超螺旋滑模观测器结构进行优化,并改善时变函数对预设时间 t的影响;
5、结合永磁同步电机的系统状态方程和新型超螺旋滑模观测器,分别获取新型超螺旋滑模观测器轴、轴的观测电流和观测反电动势的误差;
6、以电流的误差为自变量设计电流滑模面;
7、估算出转子的相关信息,对相位进行补偿,所述转子的相关信息包括电机转子的位置信息和转速的估算值。
8、在一些实施方式中,所述新型超螺旋滑模观测器由两个二阶滑模观测器组成。
9、在一些实施方式中,两个二阶滑模观测器分别为定子电流滑模观测器和反电动势滑模观测器。
10、在一些实施方式中,所述永磁同步电机的系统状态方程为:
11、
12、式中,表示静止坐标系下的定子电压分量,表示静止坐标系下的定子电流分量,为定子电阻,为定子电感,为微分算子,为静止坐标系下反电势分量,表示永磁体磁链,表示电机的转子电角度,表示电机转子的电角度。为微分算子,为坐标系下的估计电流;为坐标系下的估计反电动势;为增益系数;为时变系数。
13、在一些实施方式中,动力学建模完成后,保证预设时间稳定,构造李雅普诺夫方程,该李雅普诺夫方程为:
14、
15、并证明。
16、在一些实施方式中,引入开关函数对新型超螺旋滑模观测器结构进行优化的方程为:
17、
18、式中,为开关增益常数,为加在电流观测器中的开关函数,时变函数。
19、在一些实施方式中,获取的新型超螺旋滑模观测器轴、轴的观测电流和观测反电动势的误差为:
20、
21、在一些实施方式中,电流滑模面为:
22、
23、在一些实施方式中,估算出的转子的位置信息和转速的估算值为:
24、
25、在一些实施方式中,当转子的位置信息有相位滞后时,需对估算的转子的位置信息进行补偿,该补偿为:
26、
27、式中,为低通滤波器的截止频率。
28、本发明所述的一种舰船推进电机预设超螺旋无位置传感器控制方法的优点为:
29、1、可以通过设置预设时间 t来控制舰船推进电机转子角度误差的收敛时间,且收敛性能不受系统其他参数影响;
30、2、提出将预设时间性能引入到超螺旋控制中,并结合无位置传感器控制算法有效提高了电机转子估计精度和系统可靠性;
31、3、对比于有限时间稳定,基于预设时间的改进超螺旋控制器可以保证系统的稳定不受其他参数和系统初始状态的影响,且可人为根据系统要求设定收敛时间,同时也保证了系统的低抖振特性;
32、4、通过本发明所叙述的算法所估计的转子位置信息精度更高,收敛速度更快,且转速、转矩变化更加平稳,符合舰船三相永磁同步推进电机在水中恶劣环境下使用的要求。
技术特征:1.一种舰船推进电机预设超螺旋无位置传感器控制方法,其特征在于,舰船推进电机预设超螺旋无位置传感器控制方法包括:
2.根据权利要求1所述的一种舰船推进电机预设超螺旋无位置传感器控制方法,其中,所述新型超螺旋滑模观测器由两个二阶滑模观测器组成。
3.根据权利要求2所述的一种舰船推进电机预设超螺旋无位置传感器控制方法,其中,两个二阶滑模观测器分别为定子电流滑模观测器和反电动势滑模观测器。
4.根据权利要求3所述的一种舰船推进电机预设超螺旋无位置传感器控制方法,其中,所述永磁同步电机的系统状态方程为:
5.根据权利要求4所述的一种舰船推进电机预设超螺旋无位置传感器控制方法,其中,动力学建模完成后,保证预设时间稳定,构造李雅普诺夫方程,该李雅普诺夫方程为:
6.根据权利要求4或5所述的一种舰船推进电机预设超螺旋无位置传感器控制方法,其中,引入开关函数对新型超螺旋滑模观测器结构进行优化的方程为:
7.根据权利要求6所述的一种舰船推进电机预设超螺旋无位置传感器控制方法,其中,获取的新型超螺旋滑模观测器轴、轴的观测电流和观测反电动势的误差为:
8.根据权利要求7所述的一种舰船推进电机预设超螺旋无位置传感器控制方法,其中,电流滑模面为:
9.根据权利要求8所述的一种舰船推进电机预设超螺旋无位置传感器控制方法,其中,估算出的转子的位置信息和转速的估算值为:
10.根据权利要求9所述的一种舰船推进电机预设超螺旋无位置传感器控制方法,其中,当转子的位置信息有相位滞后时,需对估算的转子的位置信息进行补偿,该补偿为:
技术总结本发明公开了一种舰船推进电机预设超螺旋无位置传感器控制方法,属于舰船永磁同步推进电机速度控制领域。本发明在传统滑模观测器的基础上,提出改进型超螺旋控制算法,引入时变增益和开关函数,实现控制系统快速响应和低抖振,并结合预设时间控制,保证系统在不受其他参数和系统初始状态影响的情况下保持稳定,且可人为根据要求设定收敛时间,实现通过设置预设时间T来控制舰船推进电机转子角度误差的收敛时间。同时对不同预设时间T下的转子位置估计情况进行了仿真。本发明中的基于预设超螺旋观测器的一种舰船推进电机预设超螺旋无位置传感器控制方法可以提高被控系统的动态品质,在收敛速度和控制精度方面具有显著优越性。技术研发人员:白洪芬,陈涛,王超受保护的技术使用者:招商局工业智能科技(江苏)有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/334781.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。