一种小口径管道内部钻孔注浆机器人的制作方法
- 国知局
- 2024-11-21 12:13:51
本发明属于移动机器人,尤其涉及一种小口径管道内部钻孔注浆机器人。
背景技术:
1、管道内部打孔机器人需要在各种管道类型中实现精确的定位、导航和钻孔注浆。这些管道环境可能包括石头颗粒、混凝土、垃圾等杂质,以及复杂的管道布局和大小,管道由于土体因路面上方车辆等重压和震动而出现损坏或裂痕,对于管径600mm以上的管道,一般采用的是人工进入管道内打孔注浆修复,对于管径不足600mm的管道,一般采用路面下钻孔注浆,钻孔的深度难控制,且路面钻孔会对路面造成一定破坏。
2、公告号cn107600199b公开了一种腿轮履复合式钻孔救援探测机器人,包括由本发明涉及一种腿轮履复合式钻孔救援探测机器人,包括机器人本体、变胞并联机械腿、履带行走机构、保护轮支撑装置、变胞轮履转换机构;变胞并联机械腿安装在机器人本体的前方,其定平台与机器人本体前端固连;履带行走机构为两条布置在机器人本体的左右两侧的主履带;机器人顶端前部和后部安装有保护轮支撑装置,机器人底部后端布置有变胞轮履转换机构。本发明的探测机器人在整个探测过程中能够利用变胞结构以轮式行走方式通过狭小的探测管道,对探测管道出口和周围环境进行探测;之后可以利用履带式行走机构来保持较强的地形适应性,继续行进,并利用变胞并联机械腿辅助机器人越障和调节姿态,扩大环境信息采集范围。
3、但上述方案实际使用过程中,由于变胞并联机械腿转动的角度有限,且转动角度单一,很难辅助机器人调节合适的姿态越障,导致工作效率低的情况。
技术实现思路
1、本申请通过提供一种小口径管道内部钻孔注浆机器人,解决了现有技术中的变胞并联机械腿转动的角度有限,很难辅助机器人调节合适的姿态越障,导致工作效率低的技术问题。实现了机体能够前后左右的调节姿态,再配合履带轮提高避障能力,支撑机体大角度转向,打孔注浆时起到稳定支撑的作用,辅助打孔注浆角度的调节,提高工作效率。
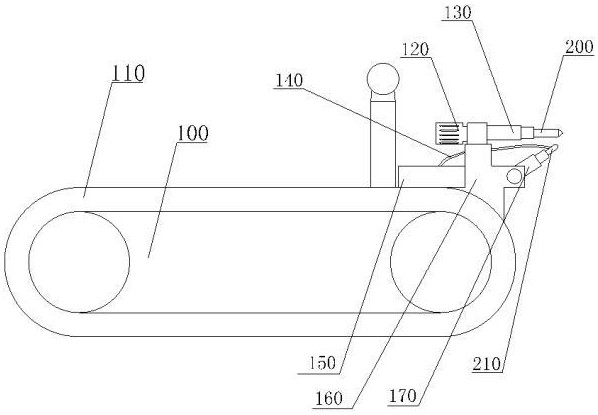
2、本申请提供了一种小口径管道内部钻孔注浆机器人,包括机体两侧对称连接有履带轮,所述机体内部带有第四电机,所述机体上端还包括有打孔注浆机构以及调节机构,其特征在于:
3、所述打孔注浆机构还包括有支撑台、旋转马达、第一电动伸缩杆、第二电动伸缩杆、钻头、喷头以及第一电机;
4、所述支撑台固定于所述机体侧端上部,所述支撑台上端固定有所述第一电机,所述支撑台一侧固定有所述旋转马达;
5、所述第一电机的输出端固定有所述第一电动伸缩杆,所述第一电动伸缩杆输出端固定有所述钻头;
6、所述第二电动伸缩杆通过旋转马达转动连接在所述支撑台的一端,所述第二电动伸缩杆输出端固定有喷头;
7、所述调节机构包括气缸、第三电机、连接件、第二电机、辅助腿以及空腔;
8、所述机体底部对称开有两对空腔,一对为两个空腔;
9、所述空腔还包括长区和短区;
10、所述气缸一端固定于短区内壁上,另一端固定有所述第三电机;
11、所述第三电机转动角度为180°内,作用是使辅助腿能对机体左右调节姿态,配合履带轮实现多种行驶角度来越过障碍;
12、所述连接件转动连接于所述第三电机的下端,所述连接件侧壁固定有所述第二电机,所述连接件通过第二电机转动连接有所述辅助腿;
13、进一步的,所述支撑台还包括第一软管、料盒以及抽送机;所述支撑台的另一端固定有料盒;所述喷头内部带有抽送机;所述第一软管一端固定于喷头上并与抽送机连接,另一端固定于料盒内进一步的,所述辅助腿内部开有作用腔,所述辅助腿下端外壁上对称开有作用槽,所述辅助腿外壁上还对称固定有第三电动伸缩杆,所述第三电动伸缩杆上固定有限位件,所述限位件与所述作用槽滑动连接,支撑脚通过限位件滑动配合在作用腔内;
14、进一步的,所述支撑台上开有供第一软管穿过的小孔,作用是限定第一软管的移动位置;
15、进一步的,所述机体上端还固定有支撑座,所述支撑座靠近料盒,所支撑座上还包括固定有摄像头;
16、进一步的,所述第二电动伸缩杆通过旋转马达可转动角度为180°内,作用是能够根据不同角度进行注浆工作;
17、进一步的,所述空腔为l形;所述长区大于所述辅助腿的长度,作用是为收纳辅助腿提供收纳空间;
18、进一步的,所述空腔分布在机体底部四个角上,作用是提高机体与地面的支撑点;
19、优选的,所述辅助腿内部开有作用腔,所述辅助腿下端外壁上对称开有作用槽,所述辅助腿外壁上还对称固定有第三电动伸缩杆;所述限位件固定在所述第三电动伸缩杆上,所述限位件与所述作用槽滑动连接所述支撑脚为倒t字形,支撑脚分为伸缩部和弹开部;所述伸缩部和弹开部为橡胶材质;
20、优选的,支撑脚为多个,每个支撑脚为l形,支撑脚外套有囊体;所述机体内部还包括固定有第一输送机;所述第一输送机靠近所述空腔;所述辅助腿上端外壁开有供第二软管穿过的穿槽;所述空腔侧壁内开有供第二软管穿过的导线孔;所述第二软管一端固定于第一输送机上,另一端通过作用腔穿过穿槽固定于所述囊体内;
21、优选的,囊体与第二软管和第三软管相连接;第二软管和第三软管通过穿槽、导线孔和作用腔分别与第一输送机和第二输送机连接,所述第二输送机装有油和铁粉;
22、本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点;
23、通过气缸向下运动,第二电机控制辅助腿升降出空腔长区,使辅助腿顶起机体,从而调节机体姿态,第三电机可在180°内转动,能调节机体前后左右的姿态,辅助打孔注浆角度的调节,尤其是对管道下侧壁的打孔注浆。有效解决了现有技术中的变胞并联机械腿转动的角度有限,且转动角度单一,很难辅助机器人调节合适的姿态越障,导致工作效率低的技术问题,实现了机体能够前后左右的调节姿态,再配合履带轮提高避障能力,支撑机体大角度转向,打孔注浆时起到稳定支撑的作用,辅助打孔注浆角度的调节,提高工作效率;
技术特征:1.一种小口径管道内部钻孔注浆机器人,包括机体(100)两侧对称连接有履带轮(110),所述机体内部带有第四电机(190),所述机体(100)上端还包括有打孔注浆机构以及调节机构,其特征在于:
2.如权利要求1所述的一种小口径管道内部钻孔注浆机器人,其特征在于,所述辅助腿(230)内部开有作用腔(234),所述辅助腿(230)下端外壁上对称开有作用槽(233),所述辅助腿(230)外壁上还对称固定有第三电动伸缩杆(231);
3.如权利要求2所述的一种小口径管道内部钻孔注浆机器人,其特征在于,支撑脚(240)为多个,每个支撑脚(240)为l形,支撑脚(240)外套有囊体(260);
4.如权利要求3所述的一种小口径管道内部钻孔注浆机器人,其特征在于,囊体(260)与第二软管(251)和第三软管(271)相连接;
5.如权利要求1所述的一种小口径管道内部钻孔注浆机器人,其特征在于,所述支撑台(160)还包括第一软管(140)、料盒(150)以及抽送机;
6.如权利要求1所述的一种小口径管道内部钻孔注浆机器人,其特征在于,所述支撑台(160)上开有供第一软管(140)穿过的小孔,作用是限定第一软管(140)的移动位置。
7.如权利要求1所述的一种小口径管道内部钻孔注浆机器人,其特征在于,所述机体(100)上端还固定有支撑座(101),所述支撑座(101)靠近料盒(150),所支撑座(101)上还包括固定有摄像头(1011)。
8.如权利要求1所述的一种小口径管道内部钻孔注浆机器人,其特征在于,所述第二电动伸缩杆(170)通过旋转马达(161)可转动角度为180°内,作用是能够根据不同角度进行注浆工作。
9.如权利要求1所述的一种小口径管道内部钻孔注浆机器人,其特征在于,所述空腔(180)为l形;
10.如权利要求1所述的一种小口径管道内部钻孔注浆机器人,其特征在于,所述空腔(180)分布在机体(100)底部四个角上,作用是提高机体(100)与地面的支撑点。
技术总结本申请公开了一种小口径管道内部钻孔注浆机器人,涉及移动机器人技术领域,包括机体、履带轮、打孔注浆机构以及调节机构;机体两侧对称固定有履带轮,机体内部带有第四电机,打孔注浆机构还包括有支撑台、旋转马达、第一电动伸缩杆、第二电动伸缩杆、钻头、喷头以及第一电机;支撑台固定于机体侧端上部,支撑台上端固定有第一电机,旋转马达固定于支撑台一侧,第一电机输出端固定有第一电动伸缩杆,第一电动伸缩杆输出端固定有钻头,支撑台一端通过旋转马达转动连接有第二电动伸缩杆,第二电动伸缩杆输出端固定有喷头;调节机构用于大角度调节机体前后左右的姿态,再配合履带轮行驶实现越障,辅助打孔注浆角度的调节并起到稳定支撑的作用,提高工作效率。技术研发人员:张杰,李佳川,李通,李辉受保护的技术使用者:上海誉帆环境建设有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/334944.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表