无人飞行器在飞动态振动检测方法与流程
- 国知局
- 2024-11-25 15:06:31
本发明涉及无人飞行器,具体涉及无人飞行器在飞动态振动检测方法。
背景技术:
1、在现代航空与无人机技术领域,无人飞行器(uav)因其高效、灵活的操作特性而被广泛应用于军事侦察、地理测绘、农业监测、灾害救援等多个领域。随着应用范围的不断扩大,无人飞行器的稳定性和安全性问题也日益凸显,其中振动控制是保证其稳定飞行与精确执行任务的关键环节。振动的存在不仅影响飞行器的结构完整性,还可能导致导航精度下降,极端情况下甚至可能造成任务失败或飞行器损毁。因此,实时、准确地检测并控制无人飞行器的振动状态是当前航空工程领域面临的重要技术挑战。
2、目前,无人飞行器的振动检测主要依赖于地面的振动检测台,这种设备能够在飞行器起飞前进行静态的振动测试。然而,这种方法存在明显的局限性:首先,振动检测台无法模拟飞行器在实际飞行中遇到的复杂气流、温度变化等动态环境因素,因此测试结果往往无法全面反映飞行器在实际飞行中的振动特性。其次,地面检测无法实现实时监测,对飞行器起飞后的突发性振动无法及时发现与处理,这对于长时间、远距离的飞行任务尤为不利。此外,地面检测通常需要飞行器停止运行,频繁的测试不仅影响飞行器的作业效率,还可能因反复拆装而增加飞行器的维护成本和故障风险。
3、为了克服上述缺陷,研究人员探索了基于传感器的在飞实时振动检测方法。这些方法通过在飞行器上安装加速度计、陀螺仪等传感器来收集振动数据,并通过无线传输技术将数据传输至地面站或云服务器进行处理分析。尽管这种方法在实时性和动态监测方面有所改进,但仍存在一些不足之处。传感器的安装可能会改变飞行器的质量分布和气动特性,从而影响其飞行性能。同时,传感器本身也可能受到环境因素的影响,如温度变化、电磁干扰等,这些都可能影响数据的准确性和可靠性。此外,大量的传感器数据需要高效的数据处理算法和强大的计算资源才能实现快速分析,这无疑增加了系统的复杂性和成本。
4、除了传感器方法之外,非接触式检测技术,如激光多普勒测振仪也被应用于无人飞行器的振动检测中。这类设备能够在不接触飞行器的情况下测量其振动特性,从而避免了对飞行器性能的影响。然而,激光多普勒测振仪等设备通常成本高昂,且对环境条件要求严格,如需要避免强光干扰和维持稳定的温度湿度条件。这些限制使得非接触式检测技术难以在野外或恶劣环境下广泛应用。
5、综上所述,现有的无人飞行器振动检测方法均存在一定的局限性,无法满足对实时性、准确性、稳定性和环境适应性的高标准要求。特别是在无人飞行器执行关键任务时,振动的实时检测和控制对于保障任务的成功完成至关重要。因此,研发一种新型的无人飞行器振动检测系统,既能够实现对飞行器在实际飞行中的振动状态进行实时、准确的监测,又不对飞行器的性能产生负面影响,且能在各种环境条件下稳定工作,已成为航空工程领域的迫切需求。
技术实现思路
1、本发明旨在设计一个无人飞行器在飞动态振动检测方法,以解决传统的试验方法成本高,且检测结果准确度不高的问题。
2、本发明提供的无人飞行器在飞动态振动检测方法,包括:
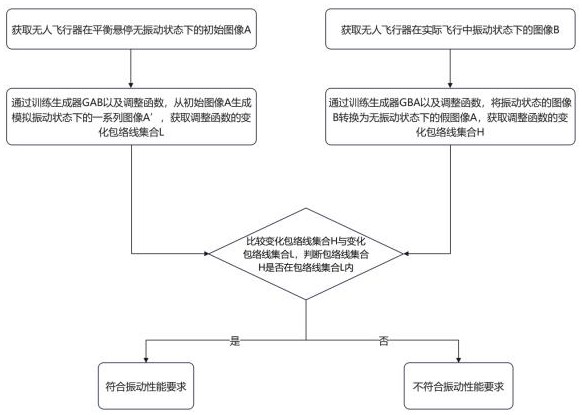
3、步骤1:获取无人飞行器在平衡悬停无振动状态下的初始图像a;
4、步骤2:通过训练生成器gab以及调整函数,从初始图像a生成模拟振动状态下的一系列图像a’,其中a’∈q{a1’、a2’、a3’......an’},n为正整数,并获取从a到每个a’的转变过程调整函数的变化,获取调整函数的变化包络线集合l;
5、步骤3:获取无人飞行器在实际飞行中振动状态下的图像b;
6、步骤4:通过训练生成器gba以及调整函数,将振动状态的图像b转换为无振动状态下的假图像a,并计算从b到假图像a的转变过程调整函数的变化,获取调整函数的变化包络线集合h;
7、步骤5:比较变化包络线集合h与变化包络线集合l,若包络线h在包络线l包围中,则判定无人飞行器的振动性能符合要求,反之,则判定无人飞行器的振动性能不符合要求。
8、优选的,所述步骤1包括:
9、设置至少包括一个高分辨率摄像机,用于实时捕获飞行中的图像数据;
10、集成无人飞行器的控制系统与图像处理系统,用于实现实时数据传输;
11、在无振动或最小振动条件下预热飞行无人飞行器,直至达到稳定的悬停状态;
12、获取无人飞行器在平衡悬停无振动状态下的初始图像a作为基准数据。
13、优选的,所述步骤2包括收集多个图像数据,包括无人飞行器在不同振动状态下的图像及对应的无振动图像;对收集的图像数据进行预处理,包括图像尺寸标准化、去噪、亮度和对比度调整。
14、优选的,在所述步骤2中,训练生成器gab采用生成对抗网络框架,包括生成器g,用于生成模拟振动状态下的图像a’;
15、判别器d,用于区分真实振动状态下的图像与生成器生成的图像a’;
16、通过迭代训练优化判别器d和生成器g的性能。
17、优选的,在所述步骤4中,使用生成对抗网络框架训练gba,包括:
18、生成器g接受实际振动图像b作为输入,输出假无振动图像a;
19、判别器d区分真实无振动图像a和由生成器产生的假图像a;
20、通过标准生成对抗网络训练过程,优化生成器g和判别器d的性能。
21、优选的,在所述步骤5中,
22、从初始图像a到模拟振动状态下的一系列图像a'的转变过程调整函数的变化包络线l为:
23、l={l1,l2,l3,...,ln};
24、从实际飞行中的振动状态图像b到无振动状态图像a的转变过程图像调整函数的变化集合:
25、h={h1,h2,h3,...,hm},
26、其中,n,m均为自然整数。
27、优选的,所述调整函数根据实际拍摄的图像进行调整,用于实现辅助生成器gab或gba,生成模拟振动状态图a’或无振动状态假图a,通过调整函数可确定点的变化,具体实现公式为:
28、
29、其中,(x,y)是原始图像中的点,(x’,y’)是调整后的点,(a,b,c,d)控制旋转和缩放,tx,ty控制平移。
30、本发明的有益效果:
31、1.实时性和动态性增强:本发明能够在无人飞行器实际飞行过程中实时监测和评估其振动状态,相较于传统的地面测试台静态检测方法,本发明能够提供更为实时和动态的数据分析,从而更加准确地反映无人飞行器在实际飞行环境中的振动特性。
32、2.成本效益:与使用激光多普勒测振仪等高成本专业设备相比,本发明利用图像处理技术和生成对抗网络(gan)技术进行振动分析,这些技术的应用大大降低了检测设备的复杂度和成本,使得振动检测更为经济高效。
33、3.无侵入性:本发明无需在无人飞行器上安装额外的物理传感器,避免了可能对飞行器性能和气动特性产生的影响,同时简化了检测流程,并减少了对飞行器修改的需求。
34、4.自动化与智能化:通过利用生成对抗网络自动学习和调整,本发明减少了对人工干预的依赖,提高了检测的准确性和可靠性。此外,自动化的流程加快了数据处理速度,提高了效率。
35、5.快速获取调整函数的变化范围:利用预先训练的生成器(gab和gba)和调整函数,本发明可以在无人机悬停及飞行状态下快速生成所需的模拟振动图像,从而快速获取调整函数的变化范围。
36、6.直接评估振动性能:通过对比实际飞行中振动状态图像的转变过程与模拟状态下的变化范围,本发明可以直接评估出无人机在实际环境中的振动性能是否达到设计的预期标准,有效判断飞行器是否符合运行安全和性能标准。
37、7.易于实施和广泛应用:本发明不依赖于复杂的硬件设备,在现有的无人机设备基础上,通过软件更新和算法优化即可实现功能升级,具有较高的经济效益和广泛的应用前景。这使得本发明可以灵活应用于多种类型的无人机,为无人机的研发和维护提供了一种新的、高效的检测方法。
本文地址:https://www.jishuxx.com/zhuanli/20241125/336153.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。