一种码头无人驾驶车队的定位数据处理方法与流程
- 国知局
- 2024-11-21 12:18:21
本技术涉及无人驾驶领域,具体而言,涉及一种码头无人驾驶车队的定位数据处理方法。
背景技术:
1、随着物联网技术的飞速发展,在很多领域都了无人驾驶技术,例如物流等领域。在物流领域的无人驾驶车队,通常需要下发任务车辆的预设任务路径数据,然后在自动行驶过程中,无人驾驶车队的车载定位器通常按照某个固定频率将接收到的gps定位数据上报,控制中心根据实时的gps定位数据控制任务车辆进行避障、速度调控的操作,从而避免堵塞等问题。
2、但是,通常各种定位方式都存在着一定的误差,车载定位器一般通过sim卡的蜂窝通信模组进行网络通信,当网络信号弱或者无信号时,会导致定位数据传输延迟或者丢失;固定码头周围可能存在各种电子设备,如无线电通信设备、雷达等,这些设备可能会产生电磁干扰,影响gps信号的接收和解析,从而导致定位信息缺失或异常;码头上的建筑物、货物堆放等遮挡物可能会阻挡gps信号,使得车载定位器无法接收到足够的卫星信号,从而导致定位信息缺失或异常, gps信号可能会经过多次反射和折射,导致信号传播时间产生误差,进而影响定位精度。gps信号定位精度低,对于无人车队的影响较大,会影响在整个车队层面对车队中的任务车辆进行精细的路径规划。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种码头无人驾驶车队的定位数据处理方法,能够批量处理码头无人驾驶车队的定位数据,发现定位异常路段,从而优化任务路径的规划过程,尽量减少任务路径中的定位信息异常。
2、本技术实施例提供的一种码头无人驾驶车队的定位数据处理方法,所述方法包括:
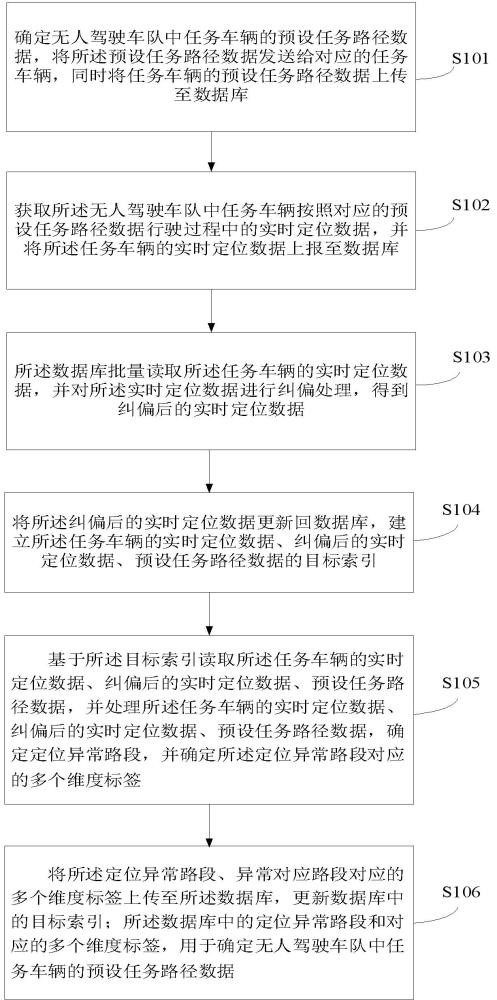
3、确定无人驾驶车队中任务车辆的预设任务路径数据,将所述预设任务路径数据发送给对应的任务车辆,同时将任务车辆的预设任务路径数据上传至数据库;
4、获取所述无人驾驶车队中任务车辆按照对应的预设任务路径数据行驶过程中的实时定位数据,并将所述任务车辆的实时定位数据上报至数据库;
5、所述数据库批量读取所述任务车辆的实时定位数据,并对所述实时定位数据进行纠偏处理,得到纠偏后的实时定位数据;
6、将所述纠偏后的实时定位数据更新回数据库,建立所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据的目标索引;
7、基于所述目标索引读取所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据,并处理所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据,确定定位异常路段,并确定所述定位异常路段对应的多个维度标签;
8、将所述定位异常路段、异常对应路段对应的多个维度标签上传至所述数据库,更新数据库中的目标索引;所述数据库中的定位异常路段和对应的多个维度标签,用于确定无人驾驶车队中任务车辆的预设任务路径数据。
9、在一些实施例中,所述的码头无人驾驶车队的定位数据处理方法中,所述数据库批量读取所述任务车辆的实时定位数据,并对所述实时定位数据进行纠偏处理,得到纠偏后的实时定位数据,包括:
10、所述数据库批量读取所述任务车辆的实时定位数据,并基于预设异常数据处理规则清理所述批量的实时定位数据,得到清理后的实时定位数据;
11、判断清理后的实时定位数据是否存在轨迹点缺失路段,若存在,则对所述轨迹点缺失路段进行插值处理,得到插值处理后的实时定位数据;
12、基于预设纠偏算法处理插值处理后的实时定位数据,进行轨迹纠偏,得到纠偏后的实时定位数据。
13、在一些实施例中,所述的码头无人驾驶车队的定位数据处理方法中,所述基于预设异常数据处理规则清理所述批量的实时定位数据,包括:判断实时定位数据中的轨迹点是否满足多个预设异常数据处理规则中的任意一个;
14、若是,则确定所述轨迹点为异常数据,清理所述异常数据;
15、所述多个预设异常数据处理规则包括:
16、超出预设任务路径数据的预设阈值范围的坐标;所述预设任务路径数据的预设阈值范围是基于码头的地图信息确定的;
17、所述实时定位数据的轨迹点重复记录;
18、所述实时定位数据的轨迹点位于码头禁区;
19、所述任务车辆的移动速度超过预设速度阈值;
20、所述任务车辆的移动速度方向变化符合预设方向异常条件;
21、所述实时定位数据中连续的轨迹点的间距离超出预设间距阈值。
22、在一些实施例中,所述的码头无人驾驶车队的定位数据处理方法中,所述基于所述目标索引读取所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据,并处理所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据,确定定位异常路段,并确定所述定位异常路段对应的多个维度标签;包括:
23、通过可视化工具连接所述数据库,并基于所述目标索引读取所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据;
24、处理所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据,确定所述实时定位数据和纠偏后的实时定位数据、实时定位数据和预设任务路径数据、纠偏后的实时定位数据和预设任务路径数据之间的对比结果;
25、基于所述对比结果,确定所述实时定位数据和纠偏后的实时定位数据、实时定位数据和预设任务路径数据、纠偏后的实时定位数据和预设任务路径数据之间的对比结果之间的偏差满足预设定位偏差条件的定位异常路段;
26、获取和所述定位异常路段相关的多种类型的信息,提取出所述定位异常路段对应的多个维度标签,确定每个维度标签的权重;所述权重表征维度标签对所述定位异常路段的影响程度;所述多种类型的信息包括:所述任务车辆的属性、天气信息、物料堆放信息、车道信息。
27、在一些实施例中,所述的码头无人驾驶车队的定位数据处理方法中,确定每个维度标签的权重,包括:
28、获取码头在预设时间段内累积的达到预设数量阈值的定位异常路段;
29、对所述达到预设数量阈值的定位异常路段进行第一聚类处理,聚合确定出同一个地点的定位异常路段;
30、获取同一个地点的每个定位异常路段的维度标签,对获取的所述维度标签进行第二聚类处理,基于第二聚类处理结果确定所述同一个地点的定位异常路段的不同维度标签的权重。
31、在一些实施例中,所述的码头无人驾驶车队的定位数据处理方法中,确定无人驾驶车队中任务车辆的预设任务路径数据,包括:
32、基于无人驾驶车队中任务车辆的出发位置和目的位置,确定多个候选任务路线数据;
33、获取所述多个候选任务路线数据实时的维度标签;
34、基于目标索引检索每个候选任务路线数据的定位异常路段,并基于每个候选任务路线数据的检索结果中的定位异常路段、维度标签、维度标签的权重,以及所述多个候选任务路线实时的维度标签,计算每个候选任务路线数据的分值;
35、确定分值最高的候选任务路线数据为预设任务路径数据。
36、在一些实施例中,所述的码头无人驾驶车队的定位数据处理方法中还包括:
37、在可视化工具的界面中展示所述实时定位数据和纠偏后的实时定位数据、实时定位数据和预设任务路径、纠偏后的实时定位数据和预设任务路径之间的对比结果。
38、在一些实施例中,还提供一种码头无人驾驶车队的定位数据处理装置,所述装置包括:
39、第一确定模块,用于确定无人驾驶车队中任务车辆的预设任务路径数据,将所述预设任务路径数据发送给对应的任务车辆,同时将任务车辆的预设任务路径数据上传至数据库;
40、上报模块,用于获取所述无人驾驶车队中任务车辆按照对应的预设任务路径数据行驶过程中的实时定位数据,并将所述任务车辆的实时定位数据上报至数据库;
41、纠偏模块,用于使所述数据库批量读取所述任务车辆的实时定位数据,并对所述实时定位数据进行纠偏处理,得到纠偏后的实时定位数据;
42、第一更新模块,用于将所述纠偏后的实时定位数据更新回数据库,建立所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据的目标索引;
43、第二确定模块,用于基于所述目标索引读取所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据,并处理所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据,确定定位异常路段,并确定所述定位异常路段对应的多个维度标签;
44、第二更新模块,用于将所述定位异常路段、异常对应路段对应的多个维度标签上传至所述数据库,更新数据库中的目标索引;所述数据库中的定位异常路段和对应的多个维度标签,用于确定无人驾驶车队中任务车辆的预设任务路径数据。
45、在一些实施例中,还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行所述的码头无人驾驶车队的定位数据处理方法的步骤。
46、在一些实施例中,一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行所述的码头无人驾驶车队的定位数据处理方法的步骤。
47、本技术实施例中,提供一种码头无人驾驶车队的定位数据处理方法,所述方法确定无人驾驶车队中任务车辆的预设任务路径数据,将所述预设任务路径数据发送给对应的任务车辆,同时将任务车辆的预设任务路径数据上传至数据库;获取所述无人驾驶车队中任务车辆按照对应的预设任务路径数据行驶过程中的实时定位数据,并将所述任务车辆的实时定位数据上报至数据库;所述数据库批量读取所述任务车辆的实时定位数据,并对所述实时定位数据进行纠偏处理,得到纠偏后的实时定位数据;将所述纠偏后的实时定位数据更新回数据库,建立所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据的目标索引;基于所述目标索引读取所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据,并处理所述任务车辆的实时定位数据、纠偏后的实时定位数据、预设任务路径数据,确定定位异常路段,并确定所述定位异常路段对应的多个维度标签;将所述定位异常路段、异常对应路段对应的多个维度标签上传至所述数据库,更新数据库中的目标索引;所述数据库中的定位异常路段和对应的多个维度标签,用于确定无人驾驶车队中任务车辆的预设任务路径数据,从而尽量任务车辆在预设任务路径中行驶时出现定位数据收发异常的情况,提高定位精度,从而提高码头无人驾驶车队的路径规划的精细度。
本文地址:https://www.jishuxx.com/zhuanli/20241120/335131.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表