一种结构件调姿定位运动曲线簇的构建方法与流程
- 国知局
- 2024-12-06 12:08:53
本技术涉及航空制造领域,具体是指一种结构件调姿定位运动曲线簇的构建方法。
背景技术:
1、结构件调姿定位是结构件的位姿(含x、y、z三个平移位置状态和rx、ry、rz三个旋转姿态状态)随时间连续调整的过程,结构件调姿定位是飞机装配的重要环节,其性能决定了结构件的位姿精度。结构件调姿定位运动包含平移运动和旋转运动两大类,且每类都包含急动度、加速度、速度和位移等多个运动量,因此结构件调姿定位运动曲线实际上是一组曲线,即曲线簇。曲线簇中的每种运动曲线都对结构件调姿定位的性能产生影响。在飞机装配过程中,不同特性的调姿定位运动曲线簇,不仅对结构件调姿定位的结构变形和内部应力有着不同程度的影响,而且也影响结构件调姿定位的效率。
2、在质量方面:有的结构件在调姿定位过程中出现急启动、急制动、急加速和急减速等问题,说明该运动曲线规划得不合理,容易对结构件及其调姿定位设备造成损伤;有的结构件在调姿定位过程中甚至出现爬行、抖动、滞阻、窜动等严重问题,说明运动曲线规划存在重大缺陷,很可能对结构件及其调姿定位设备造成严重损伤,甚至造成人身伤害。
3、在效率方面:有的结构件在调姿定位过程中,x、y、z三轴的平移运动是依次进行的,rx、ry、rz三轴的旋转也是依次进行的,调姿定位方式非常的机械和低效,其效率是一步到位的调姿定位效率的1/6,严重影响了结构件调姿定位的效率。因此,结构件调姿定位运动曲线簇的不同构建方法,直接导致不同的运动特性。
4、为了提高结构件调姿定位的柔顺性、安全性和高效率,需研究一种结构件调姿定位运动曲线簇的新构建方法。
技术实现思路
1、为了解决结构件在调姿定位运动过程中出现的急启动、急制动、急加速、急减速,以及爬行、抖动、滞阻、窜动等问题,发明了一种结构件调姿定位运动曲线簇的构建方法。本技术的主要技术实现要素:有:
2、一种结构件调姿定位运动曲线簇包含平移运动曲线子簇和旋转运动曲线子簇。所述平移运动曲线子簇是所述结构件在调姿定位过程中平移运动量随时间变化的一组曲线,包含平移急动度-时间曲线、平移加速度-时间曲线、平移速度-时间曲线和平移位移-时间曲线,其中所述平移急动度-时间曲线是所述结构件在调姿定位过程中平移急动度j随时间t变化的曲线,所述平移加速度-时间曲线是所述结构件在调姿定位过程中平移加速度α随时间t变化的曲线,所述平移速度-时间曲线是所述结构件在调姿定位过程中平移速度ν随时间t变化的曲线,所述平移位移-时间曲线是所述结构件在调姿定位过程中平移位移l随时间t变化的曲线;所述旋转运动曲线子簇是所述结构件在调姿定位过程中旋转运动量随时间变化的一组曲线,包含旋转急动度-时间曲线、旋转加速度-时间曲线、旋转速度-时间曲线和旋转位移-时间曲线,其中所述旋转急动度-时间曲线是所述结构件在调姿定位过程中旋转急动度e随时间t变化的曲线,所述旋转加速度-时间曲线是所述结构件在调姿定位过程中旋转加速度ε随时间t变化的曲线,所述旋转速度-时间曲线是所述结构件在调姿定位过程中旋转速度ω随时间t变化的曲线,所述旋转位移-时间曲线是所述结构件在调姿定位过程中旋转位移θ随时间t变化的曲线。
3、一种结构件调姿定位运动曲线簇的构建方法,其特征在于包含以下步骤:
4、(a)参数设置:设所述结构件调姿定位中的平移运动和旋转运动均是从t=0时刻开始的,设t是所述结构件调姿定位运动的总时长,设l是所述结构件调姿定位中的平移运动总位移,θ是所述结构件调姿定位中的旋转运动总位移;
5、(b)设ρ和η分别是构建结构件调姿定位运动曲线簇的共用底层参数,按式1解算出基于所述平移运动总位移l、所述旋转运动总位移θ和所述总时长t的所述底层参数ρ和η:
6、
7、(c)按式2设置所述结构件在t=0时刻和t=t时刻的平移加速度α0和αt,以及旋转加速度ε0和εt:
8、
9、(d)按式3设置所述结构件在t=0时刻和t=t时刻的平移速度ν0和νt,以及旋转速度ω0和ωt:
10、
11、(e)按式4设置所述结构件在t=0时刻和t=t时刻的平移位移l0和lt,以及旋转位移θ0和θt:
12、
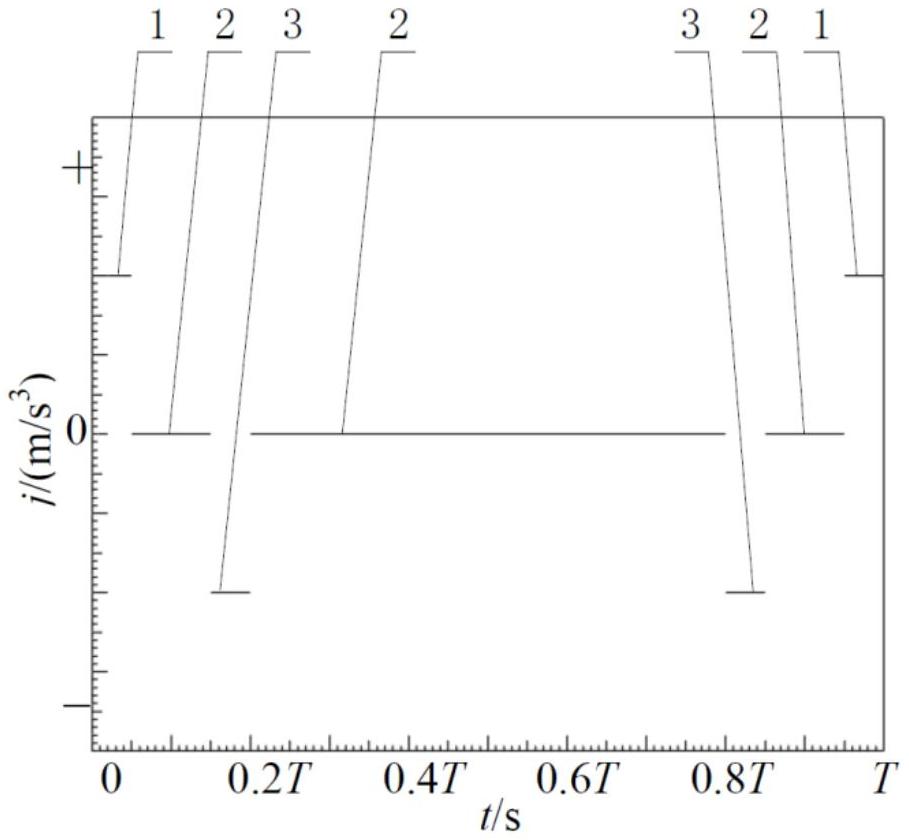
13、(f)将所述结构件在调姿定位运动过程中的总时长t分为七个时间段,并规划每个时间段的平移急动度j和旋转急动度e的特性:
14、0.00t~0.05t:平移正急动、旋转正急动,
15、0.05t~0.15t:平移零急动、旋转零急动,
16、0.15t~0.20t:平移负急动、旋转负急动,
17、0.20t~0.80t:平移零急动、旋转零急动,
18、0.80t~0.85t:平移负急动、旋转负急动,
19、0.85t~0.95t:平移零急动、旋转零急动,
20、0.95t~1.00t:平移正急动、旋转正急动;
21、(g)根据所述的平移急动度j和旋转急动度e的特性,按式5和式6分别构建所述结构件在调姿定位过程中平移急动度j和旋转急动度e在七个时间段随时间t变化的曲线:
22、
23、
24、(h)按式7和式8分别构建所述结构件在调姿定位过程中平移加速度α和旋转加速度ε在七个时间段随时间t变化的曲线:
25、
26、
27、(i)按式9和式10分别构建所述结构件在调姿定位过程中平移速度ν和旋转速度ω在七个时间段随时间t变化的曲线:
28、
29、
30、(j)按式11和式12分别构建所述结构件在调姿定位过程中平移位移l和旋转位移θ在七个时间段随时间t变化的曲线:
31、
32、
33、进一步的,所述平移急动度-时间曲线随时间的积分得到所述平移加速度-时间曲线,所述平移加速度-时间曲线随时间的积分得到所述平移速度-时间曲线,所述平移速度-时间曲线随时间的积分得到所述平移位移-时间曲线;
34、进一步的,所述旋转急动度-时间曲线随时间的积分得到所述旋转加速度-时间曲线,所述旋转加速度-时间曲线随时间的积分得到所述旋转速度-时间曲线,所述旋转速度-时间曲线随时间的积分得到所述旋转位移-时间曲线。
35、本发明技术与现有技术相比,具有以下优点和显著效益:
36、(1)解决了以往结构件在调姿定位运动过程中的急启动、急减速、急制动和急加速等问题,实现了结构件调姿定位运动的柔顺性。
37、(2)解决了以往结构件在调姿定位运动过程中的爬行、抖动、卡阻和窜行等问题,实现了结构件调姿定位运动的光滑性。
38、(3)改变了以往结构件在调姿定位运动过程中x、y、z三轴平移运动依次进行,以及rx、ry、rz三轴旋转依次进行的机械式调姿定位模式,实现了飞机部件调姿定位运动的一步到位,解决了飞机部件调姿定位的低效率问题。
39、以下结合实施例附图对本技术做进一步详细描述:
本文地址:https://www.jishuxx.com/zhuanli/20241204/339597.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表